(54) ТРЕНАЖЕР ДЛЯ ЖИВОТНЫХ
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ МОЦИОНА ЖИВОТНЫХ | 2007 |
|
RU2344594C1 |
| Устройство раздачи корма | 1987 |
|
SU1450795A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1985 |
|
SU1304790A1 |
| ТРЕНАЖЕР (ВАРИАНТЫ) | 2000 |
|
RU2201783C2 |
| Адаптивный фехтовальный тредбан | 1990 |
|
SU1741827A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1984 |
|
SU1168159A1 |
| ТРЕНАЖЕР | 2000 |
|
RU2201784C2 |
| Способ дозированного кормления птицы и устройство для его осуществления | 1988 |
|
SU1588343A1 |
| СПОСОБ И УСТРОЙСТВО ЭНЕРГОСБЕРЕГАЮЩЕГО ОБЕЗЗАРАЖИВАНИЯ КОРМОВ И ПРОДУКТОВ ЖИВОТНОВОДСТВА И ПТИЦЕВОДСТВА | 2012 |
|
RU2521712C2 |
| ТРЕНАЖЕР ДЛЯ ПЛОВЦОВ | 2002 |
|
RU2198708C1 |
1
Изобретение относится к тренажерам для животных, преимущественно поросят, используемым в животноводстве.
Известен тренажер для животных, включающий бесконечный ленточный транспортер с приводом и кормушку, смонтирован- 5 ную в конце транспортера 1.
Наиболее близким по технической сущности и достигаемому результату к изобретению является тренажер для животных, включающий бесконечный ленточный тран- ,Q спортер с приводом, состоящим из электродвигателя и устройства для регулирования его скорости, и кормушку, расположенную в конце транспортера 2.
Недостатком известиых тренажеров является то, что они не обеспечивают авто- 15 матизации процесса тренировки. В результате существенно усложняется их эксплуатация.
Цель изобретения - упрощение эксплуатации путем автоматизации процесса тре- о нировки.
Поставленная цель достигается тем, что устройство для регулирования скорости электродвигателя состоит из датчиков месторасположения животного, установленных
вдоль транспортера, блока временных интервалов и блока управления на два входа, причем датчики месторасположения животного связаны с входами блока временных интервалов и блока -управления, который подключен своим вторым входом и выходом соответственно к выходу блока временных интервалов и к электродвигателю.
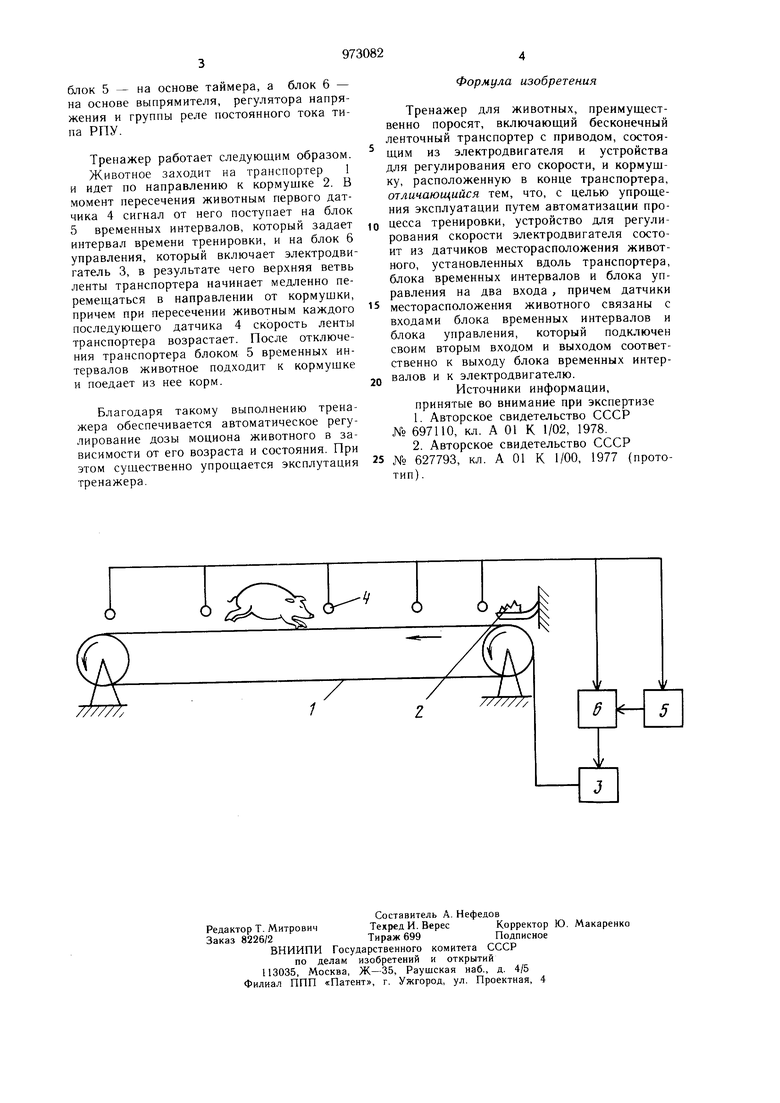
На чертеже изображена структурная схема тренажера для животных, преимущественно поросят.
Тренажер включает бесконечный ленточный транспортер 1, в конце которого размещена кормушка 2. Транспортер снабжен приводом, состоящим из электродвигателя 3 постоянного тока и устройства для регулирования его скорости. Последнее выполнено из датчиков 4 месторасположения животного, установленных вдоль транспортера, блока 5 временных интервалов и блока 6 управления.
Датчики 4 связаны с входами блока 5 и блока 6, причем последний также подключен своими входом и выходом соответственно к выходу блока 5 и к электродвигателю 3. Датчики 4 выполнены на основе фотодиодов и преобразователя сигналов,
блок 5 - на основе таймера, а блок 6 - на основе выпрямителя, регулятора напряжения и группы реле постоянного тока типа РПУ.
Тренажер работает следующим образом.
Животное заходит на транспортер 1 и идет по направлению к кормушке 2. В момент пересечения животным первого датчика 4 сигнал от него поступает на блок 5 временных интервалов, который задает интервал времени тренировки, и на блок 6 управления, который включает электродвигатель 3, в результате чего верхняя ветвь ленты транспортера начинает медленно перемещаться в направлении от кормущки, причем при пересечении животным каждого последующего датчика 4 скорость ленты транспортера возрастает. После отключения транспортера блоком 5 временных интервалов животное подходит к кормушке и поедает из нее корм.
Благодаря такому выполнению тренажера обеспечивается автоматическое регулирование дозы моциона животного в зависимости от его возраста и состояния. При этом существенно упрощается эксплутация тренажера.
Формула изобретения
Тренажер для животных, преимущественно поросят, включающий бесконечный ленточный транспортер с приводом, состоящим из электродвигателя и устройства для регулирования его скорости, и кормущку, расположенную в конце транспортера, отличаюи ийся тем, что, с целью упрощения эксплуатации путем автоматизации процесса тренировки, устройство для регулирования скорости электродвигателя состоит из датчиков месторасположения животного, установленных вдоль транспортера, блока временных интервалов и блока управления на два входа , причем датчики
месторасположения животного связаны с входами блока временных интервалов и блока управления, который подключен своим вторым входом и выходом соответственно к выходу блока временных интервалов и к электродвигателю.
Источники информации, принятые во внимание при экспертизе
№ 627793, кл. А 01 К 1/00, 1977 (прототип).
