Изобретение относится к механизации трудоемких процессов в животноводстве, в частности к способам и устройствам для раздачи кормов животным.
Целью изобретения является pacuJиpeниe технологических возможностей способа при одновременном снижении энергоемкости раздачи кормов путем обеспечения ступенчатого изменения их доз для нескольких групп животных с различной продуктивностью.
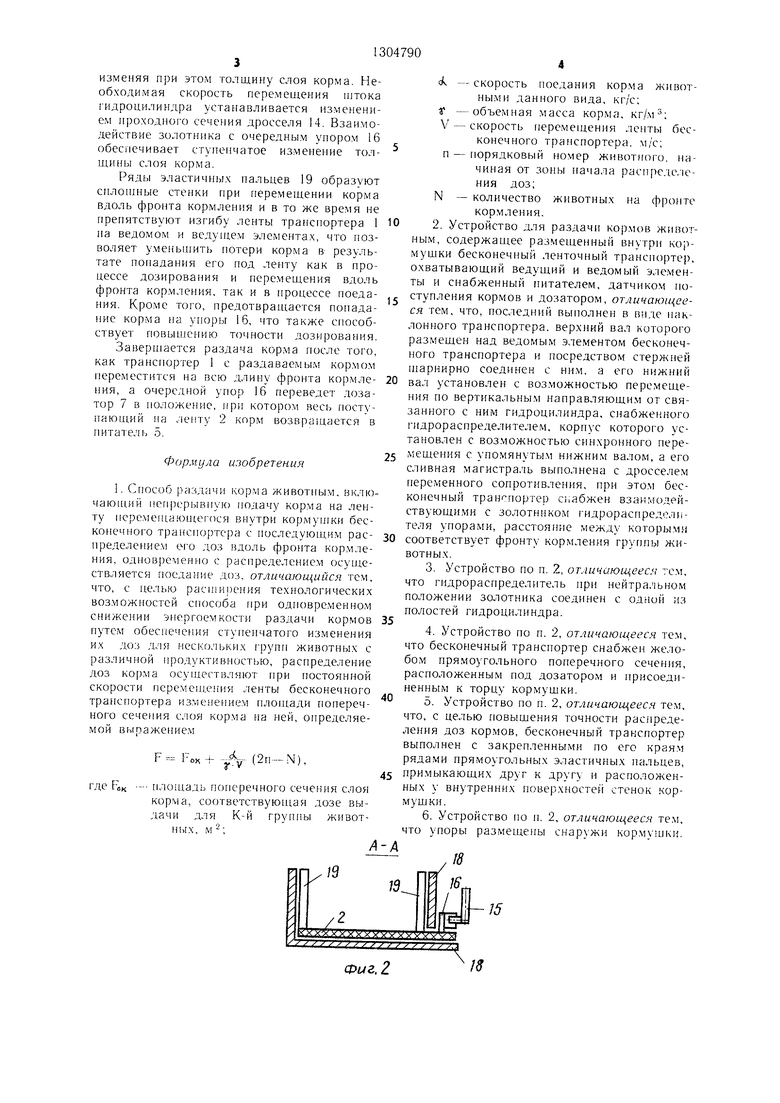
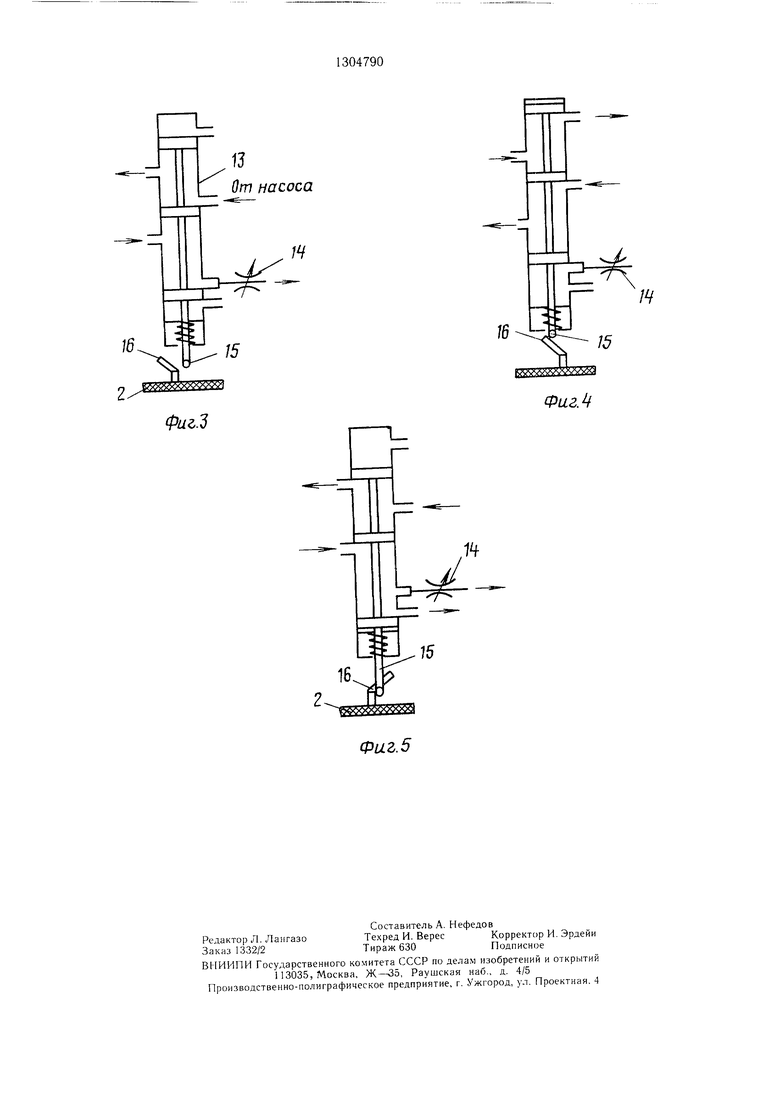
На фиг. 1 изображено устройство для раздачи кормов, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - гидрораспределитель при нейтральном положении золотника, продольный разрез; на фиг. 4 - то же, при взаимодействии золотника с верхней частью упора; на фиг. 5 - то же, при взаимодействии золотника с нижней частью упора.
Устройство для осуществления способа раздачи кормов содержит размещенный внутри кормущки бесконечный ленточный транспортер 1, охватывающий лентой 2 ведущий 3 и ведомый 4 элементы, который снабжен питателем 5, датчиком 6 поступления кормов и дозатором 7, выполненным в виде наклонного транспортера. Верхний вал 8 последнего размещен над ведомым элементом 4 и посредство.м стержней 9 шарнир- но соединен с ним. Нижний вал 10 дозатора установлен с возможностью перемещения по вертикальным направляющим 11 от связанного с ним штока гидроцилиндра 12, снабженного гидрораспределителем 13. Корпус гидрораспределителя 13 установлен с возможностью синхронного перемещения с нижним валом 10, а его сливная магистраль выполнена с дросселем 14 переменного сопротивления. Транспортер 1 снабжен взаимодействующими с золотником 15 гидрораспределителя упорами 16, размещенными снаружи кормушки, расстояние между которыми соответствует (|)ронту кормления групп животных. Гидрораспределитель при нейтральном положении золотника сообщен с одной из полостей гидроцилиндра. Датчик б сблокирован с приводом 17 транспортера 1 и дозатора 7. К торцу кормущки присоединен желоб 18 прямоугольного сечения, расположенный под дозатором. Для повышения точности распределения доз кормов и уменьшения их потерь транспортер 1 выполнен с закрепленными по его краям рядами прямоугольных эластичных пальцев 19, примыкающих друг к другу и расположенных у внутренних поверхностей стенок кормущки.
Способ раздачи кормов животным заключается в следующем.
На ленту 2 транспортера 1 питателем 5 подают корм, который воздействует на датчик 6, в результате чего подается команда на включение привода 17, сообщающего движение ленте транспортера вдоль кормуш
0
5
0
ки с постоянной скоростью и поступающему на нее корму из питателя, а также транспортеру дозатора 7. Движущийся вместе с лентой первый упор 16 воздействует на золотник 15 гидрораспределителя 13 и смещает его из нейтрального положения. В результате рабочая жидкость из нагюрной ма1 истра- ли гидросистемы подается гидрораспределителем в одну из полостей гидроцилиндра 12, в то время как другая его полость сообщается со сливной магистралью гидросистемы. Шток гидроцилиндра 12 быстро перемещает по вертикальным направляющим 1 1 нижний вал 10 наклонного транспортера- дозатора 7, а вместе с ним и корпус гидрораспределителя. В это время верхний вал 8 движется но дуге окружности, радиус которой равен длине стержней 9. Когда рабочая поверхность упора 16 выйдет из под золотника 15, он возвратится в нейтральное положение, а наклонный транспортер дозатора займет относительно ленты 2 транспортера положение, соответствующее заданной дозе выдачи корма с учето.м его поедания во время раздачи. Дозатор разрав1 ивает слой корма, поступающего на транспортер 1, а его избыток возвращает в питатель 5. В зоне действия дозатора транспортер 1 перемещается в желобе 18 прямоугольного сечения, в результате чего его боковые стенки отклоняют ряды э/;астичных пальцев 19 до перпендикулярного ленте положения. При этом нижняя часть дозатора совместно с лентой 2 и рядами эластичных пальцев 19 формирует слой корма прямоугольного сечения, нлощадь которого изменяется за счет регулирования толщины слоя в соответствии с выражением
F FOK +
а.
(2n--N),
5
0
5
где FOK -
площадь поперечпого сечения с.юя корма, соответствующая дозе BIJI- дачи для К-й группы животных, м ;
-скорость поедания корма животными данного вида, к1 /с;
-объемная масса корма, KI / M- ;
-скорость перемещения .ленты бесконечного транспортера, м/с;
-порядковый номер животно1 о, начиная от зоны начала распределения доз;
количество животных на фронл е кормления.
В пределах фронта кормления едкой группы животных это достигается нри нейтральном положении золотника гидрораспределителя, когда одна полость гидроцилиндра соединена с напорной магистралью гидросистемы, а вторая через дроссель 14 неременного сопротивления - со сливпой .магистралью. Под действием гидроци.чиндра нижний вал транспортера-дозатора медленно приближается к ленте транспортера 1,
V
N
изменяя при этом толщину слоя корма. Необходимая скорость перемещения штока гидроцилиндра устанавливается изменением проходного сечения дросселя 14. Взаимодействие золотника с очередным упором 16 обеспечивает стунепчатое изменение толщины слоя корма.
Ряды эластичны.ч нальцев 19 образуют снлон1ные стенки при перемещении корма вдоль фронта кормления и в то же время не препятствуют изгибу ленты транспортера 1 па ведомом и ведущем элементах, что позволяет уменьпшть потери корма в результате попадания его под ленту как в процессе дозирования и пере.мещенпя вдоль фронта кормления, так и в нроцессе ноеда- НИН. Кроме того, предотвращается понада- пие корма па упоры 16, что также способствует повышению точности дозирования.
Завершается раздача корма после того, как транспортер 1 с раздаваемым кормом переместится на всю длину фронта кормле- ПИЯ, а очередной упор 16 переведет дозатор 7 в положение, прп котором весь поступающий на ленту 2 корм возвращается в питатель 5.
Формула изобретения
1. Способ раздачи корма животным, включающий пепрс рьшпую подачу кор.ма на лепту перемеп1ающегося внутри кормушки бесконечного транспортера с последуюн им рас- нределепие.м его доз вдоль фронта кормления, одновременно с распределением осунде- ствляется гюедание доз, отличающийся тем, что, с целью расп1ирения технологических возможностей способа при одновременном снижении энергоемкости раздачи кормов нутем обеспечения ступенчатого изменения их доз для нескольких групп животных с различной продуктивностью, распределение доз корма осуществляют при постоянной скорости перемеп;.ения ленты бесконечного тра 1спортера изменением плоп1ади поперечного сечения слоя корма па ней, определяемой выражением
ок
-А (2n--N),
площадь поперечного сечения слоя корма, соответствуюн1ая дозе выдачи для К-й группы животных, м ;
0
5
0
5
0
5
k -скорость поедания корма животными данного вида, кг/с;
If -объемная масса корма,
V - скорость перемеп ення ленты бесконечного транспортера, м/с; п - порядковый номер животного, начиная от зоны начала раснреде.к - ния доз;
N - количество животных па фронте кормления,
2.Устройство для ра,здачи кормов животным, содержащее размещенный внутрн кор- мущки бесконечный ленточный транснортер. охватывающий ведущий и ведомый элементы и снабженный питателем, датчиком но- ступления кормов и дозатором, отличающееся тем, что, носледний выполнен в виде наклонного транспортера, верхний вал которого размещен над ведомым элементом бесконечного транспортера и посредством стержней шарнирно соединен с ним, а его нижний вал установлен с возможностью перемеиде- ния по вертикальным направляющим от связанного с ним гидроцилиндра, снабженного гидрораспределителем, корпус которого установлен с возможностью синхронного перемещения с упомянутым нижним валом, а его сливная магистраль выполнена с дросселем неременного сопротивления, при этом бесконечный транспортер с,абжен взаимодей- ствующи.ми с золотником гидрораспредолп- теля упорами, расстояние между которыми соответствует фронту кормления животных.
3.Уетройство по п. 2, отличаюи еес.ч тем. что гидрораепределитель при нейтральном положении золотника соединен с одной ;i3 полостей гидроцилиндра.
4.Устройство по п. 2, отличающееся тем, что бесконечный транспортер снабжен желобом прямоугольного поперечного сечения, расположенным под дозатором и присоединенным к торцу кормушки.
5.Устройство по п. 2, отличающееся тем. что, с целью повышения точности распределения доз кормов, бесконечный транспортер выполнен с закрепленными по его краям рядами прямоугольных эластичных нальцев, примыкающих друг к другу и расположенных у внутренних поверхностей стенок кор- мущки.
6.Устройство по н. 2, отличающееся тем. что упоры размещепы снаружи кормушки.
А-А
Фиг. 2
/в
t
От насоса
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1983 |
|
SU1114385A1 |
| Кормораздатчик | 1984 |
|
SU1340688A1 |
| Кормораздатчик | 1987 |
|
SU1445653A2 |
| Способ раздачи корма животным и устройство для его осуществления | 1987 |
|
SU1570683A1 |
| Способ раздачи зерновой смеси крупному рогатому скоту на откорме | 2022 |
|
RU2791733C1 |
| Устройство для дозированной раздачи кормов животным | 1988 |
|
SU1561926A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1979 |
|
SU888882A1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Устройство для раздачи кормов | 1982 |
|
SU1017237A1 |
| Установка для раздачи кормов в животноводческих помещениях | 1984 |
|
SU1219022A1 |
Изобретение относится ь ме.чанизации трудоемк1. процессов в животноводстве, в частности к сн(.)собам и устройствам . итя раздачи кормов животным. Цель и:к)брете1111я - расширение те.мю.тосических возможностей способа при одновременном снижении энер- гое.мкости раздачи кормов путем обеенече- ния ступенчатого изменения их доз для нескольких 1 рун11 животных с раз.чичной про- дуктивност1 ю. Способ заключается в подаче на ленту иеремешакмцегося внутри кормушки беск)иечп1р1 о грапсиортера 1 с последующим раснреде.1епием его ДОЗ вдо, 1ь фронта кормле11пя. n.uioiipeMeiiHO с которым осуществляется их ное;1ание. Распределение доз осун1еетвляют при постоянной скорости перемещения лепты бескопечнетто транспортера изменением нлошади Fp поиеречного сечения слоя корма на ней дозатором 7, определяемой выражением + сС: M.-jj-V) (2fl N-), I де FCK плошадь ноиереч- ного сечения с.;1оя корма, соответствующая дозе выдачи д,чя К-й i pyiinbi животнь х. d.- скорость поедания корма животными данного вида, кг/с; -у (н ) ьемная масса KOJV ма, к /м ; V скорость перемешенпя . len- ты бесконечного т)анспоргера, м/с; п порядковый номер жи1К)тпс)1 о, начиная от ;u)- ны начала раснределешш доз; N - количество животш)1х на фронте кормления. Для управления работой дозат ора служат закрепленные па лепте упоры 16, взаимодей- етву1О1Г1ие с золотпиком 15 гг.дрораснреде- лителя 13, сообщенного с гидроцилиндром 12 дозатора п епабжепным дросселем. 2 с. п. и 4 3. и, ф-лы, 5 П.1. (О Л СО о 4 -J СО о Фиг.1
,
/
16
А
/5
л у)9У5оО ХХ чХлЛ 1
Фи.д
-XfcJB
&
w
S i S yyYS VSogCj
Фиг.
Фиг. 5
| Патент США N 3333574, кл | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1979 |
|
SU888882A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
