(54) МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный активный протезРуКи | 1979 |
|
SU806022A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| Протез плеча | 1989 |
|
SU1732967A1 |
1
Изобретение относится к медшганской технике, в частности к разделу протезов верхних конечностей, и может найти применение при вычленении локтевого сустава.
Известен многофункциональный активгный протез руки, содержащий наплечник, гильзу плеча, предплечье и искусственную кисть, электроприводы сгибания-разгиба ния локтя, ротации кисти, качания кисти j и схвата, первый и второй датчики управления функциями, два фиксатора изменения функции, три усилители, выходы которых соединены с входами соответствув ших приводов 11 .и
Недостатком известного устройства является большое время выполнения сложных рабочих операций, что обусловлено необходимостью последовательного перемещения звеньев протеза в пространстве. 20
Цепь изобретения - сокращение времени на выполнение сложных рабочих операций.
Поставленная цепь аостигаетсйтем,чтов многофункциональный активный протез руки.
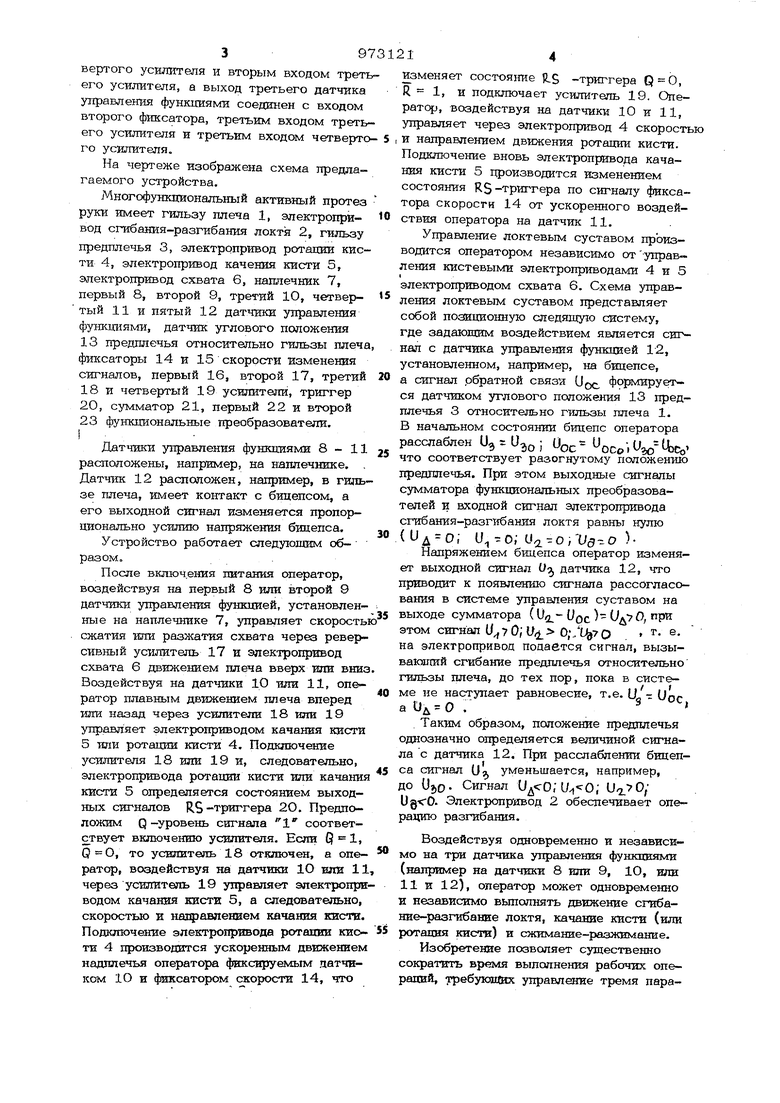
содержащий наплечник, гильзу плеча, пред1шечье и искусственную кисть, электроприводы сгибания-разгибания, ротации кисти, качания кисти и схвата, первый и второй датчики управления функциями, два фиксатора изменения функшш, три усилителя, выходы которых соединены с входами соответствующих приводов, введены третий, четвертый и пятый датчики управления функциями, последовательно соединенные датчик углового положения предплечья относительно гильзы плеча, сумматор, второй вход которого связан с пятым датчиком и два преобразователя, выходы которых подключены к первому усилителю, четвертый усилитель, RS-триггер, входы которого соединены с фиксаторами, первый выход триггера - с первым входом третьего усилителя, а второй выход черезпервый вход четвертого усилителя - с электроприводом ротации кисти, при этом выход четвертого датчика соединен с входом первого фиксатора, вторым входом чет- вертого усюштеля и вторым входом треть его усилителя, а выход третьего датчика управления функциями соединен с входом второго фгшсатора, третьим входом третьего усилителя и третьим входом четверто го усилителя. На чертеже изображена схема тфедлагаемого устройства. Многофункциональный активный протез руки имеет гильзу плеча 1, электропривод сгибания-разгибания локтя 2, гильзу предплечья 3, электропривод ротации кисти 4, электропривод качения кисти 5, электрохфивод схвата 6, накчечник 7, первый 8, второй 9, третий 10, четвертый 11 и пятый 12 датчики управления функциями, датчик углового положения 13 предплечья относительно гильзы плеча фшссаторы 14 и 15 скорости изменения сигналов, первый 16, второй 17, третий 18 и четвертый 19 усигштепи, триггер 20, сумматор 21, первый 22 и второй 23 функциональные преобразователи. Датчики управления функциями 8-11 расположены, например, на наплечнике. . Датчик 12 расположен, например, в гильзе плеча, имеет контакт с бицепсом, а его выходной сигнал изменяется пропорционально усилию напряжения бицепса. Устройство работает следующим образом. После включения питания оператор, воздействуя на первый 8 или второй 9 датчики управления функцией, установленные на наплечнике 7, управ;:1яет скорость сжатия или разжатия схвата через реверсивный усилитель 17 и электропривод схвата б движением плеча вверх или вниз Воздействуя на датчики 10 шта 11, оператор плавным движением плеча вперед или назад через усилители 18 или 19 управляет электроприводом качания кисти 5 шш ротации кисти 4. Подключение усилителя 18 или 19 и, следовательно, электропривода ротации кисгя или качания кисти 5 определяется состоянием выходных сигналов RS -триггера 2О. Предположим Q -уровень сигнала 1 соответствует включению усилителя. Если Q l, , то усилитель 18 отключен, а oneратор, воздействуя на датчики 1О или 11 через усилитель 19 управляет электропри водом качания кисти 5, а следовательно, скоростью и налравпением качания кисти, Подключение электропривода ротапии кио ТЕ 4 производится ускоренным движением надплечья оператора фвжсируемьпуг датчиком 1О и фиксатором скорости 14, что изменяет состояние Hg -триггера Q 0, R 1, и подключает усилитель 19. Оператор, воздействуя на датчики 10 и 11, управляет через электропривод 4 скоростью и направлением движения ротации кисти. Подключение вновь электропривода качания кисти 5 цроизводится изменением состояния RS-триггера по сигналу фиксатора скоросги 14 от ускоренного воздействия оператора на датчик 11. Управление локтевым суставом производится оператором независимо отуправления кистевыми электроприводами 4 и 5 электроприводом схвата 6. Схема управления локтевым суставом представляет собой позиционную следящую систему, где задающим воздействием является сигнал с датчика управления функцией 12, установленном, например, на бицепсе, а сигнал обратной связи (J(x. формируется датчиком углового положения 13 предплечья 3 относительно гильзы плеча 1. В начальном состоянии бицепс оператора расслаблен U U ; OQC что соответствует разогнутому положению предплечья. При этом выходные сигналы сумматора функциональных преобразователей и входной сигнал электропривода сгибания-разгибания локтя равны нулю (ид о; u/iгоги -о ) Напряжением бицепса оператор изменяет выходной сигнал 0 датчика 12, что приводит к появлению сигнала рассогласования в системе управления суставом на выходе сумматора (U, ), при этом сигнал , г. е, на электропривод подается сигнал, вызывающий сгибание предплечья относительно гильзы плеча, до тех пор, пока в системе не наступает равновесие, т.е. LiL - UQC а Од О . Таким образом, положение предплечья однозначно определяется величиной сигнала с датчика 12, При расслаблении бицепса сигнал и уменьшается, например, до Ujo- Сигнал , . Электропривод 2 обеспечивает операцшо разгибания. Воздействуя одновременно и независимо на три датчика управления функциями (например на датчики 8 или 9, 1О, или 11 и 12), оператор может одновременно и независимо выполнять движение сгибание-разгибание локтя, качание кисти (или ротация кисти) и сжимание-разжимание. Изобретение позволяет существенно сократить время выполнения рабочих операций, требуюиШх управление тремя пара
