(.5+) СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ БУРОВОГО СНАРЯДА

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля траектории шахтных технических скважин | 1987 |
|
SU1476118A1 |
| СПОСОБ РОТОРНОГО БУРЕНИЯ СКВАЖИН МОДУЛЬНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ МАЛОГО ДИАМЕТРА | 2018 |
|
RU2687998C1 |
| Устройство для контроля направления бурения скважин | 1977 |
|
SU750049A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |
| СПОСОБ БУРЕНИЯ НАПРАВЛЕННЫХ СКВАЖИН | 2006 |
|
RU2306399C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ АЗИМУТА УГЛА УСТАНОВКИ ОТКЛОНИТЕЛЯ В ВЕРТИКАЛЬНЫХ СТВОЛАХ СКВАЖИН | 2009 |
|
RU2434132C2 |
| СПОСОБ БУРЕНИЯ НАПРАВЛЕННЫХ СКВАЖИН | 1994 |
|
RU2088739C1 |
| Устройство для контроля положения бурового снаряда в пространстве | 1980 |
|
SU926255A1 |
| Способ определения координат исполнительного органа буровой установки при проходке стволов | 1990 |
|
SU1768752A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ (ВАРИАНТЫ), СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ, УЗЕЛ СОЛЕНОИДА УСТРОЙСТВА ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ | 2007 |
|
RU2468200C2 |
Изобретение относится к подъему затонувших судов, преимущественно к устройствам для протаскивания служебных тросов под днищем затонувшего судна или прочих затонувших объектов, и может быть использовано в горном деле и геологоразведке при бурении направленных скважин, а также в строительном деле при бестраншейной прокладке подземных коммуникаций .
Известные способы контроля направления движения разного рода буровых снарядов основаны на задании опорной плоскости или опорной системы координат и измерении угла отклонения относительно опорной системы-отсчета. При этом влияние горногеологических, технических и технологических факторов не учитываются , и поэтому измеряемые величины становятся неоднозначными.
Известен способ определения искривления траектории скважины, заключающийся в начальной ориентации перемещающегося контейнера относительно опорной системы координат и измерении проекции угловой скорости контейнера на касательную и бинормаль к траектории, а также скорости перемещения по скважине, по ,Q которым определяют кривизну скважины 1 .
Этот способ обладает рядом недостатков: дискретное измерение искривления скважины, измерения ведут-
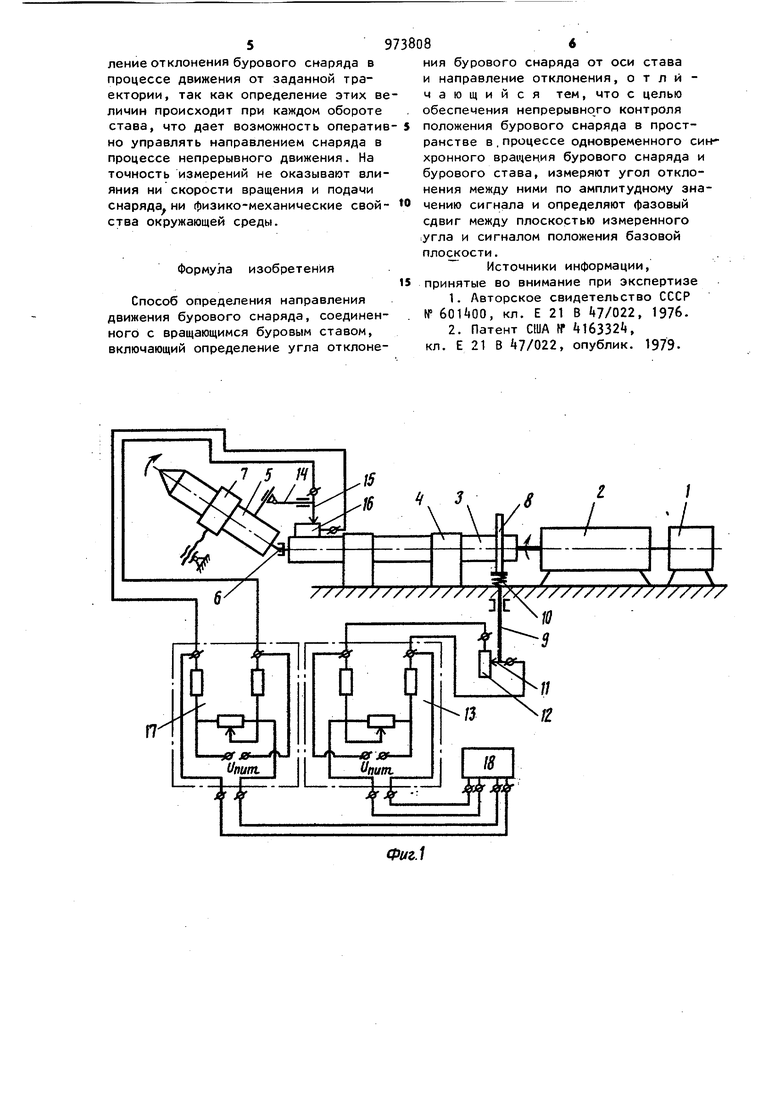
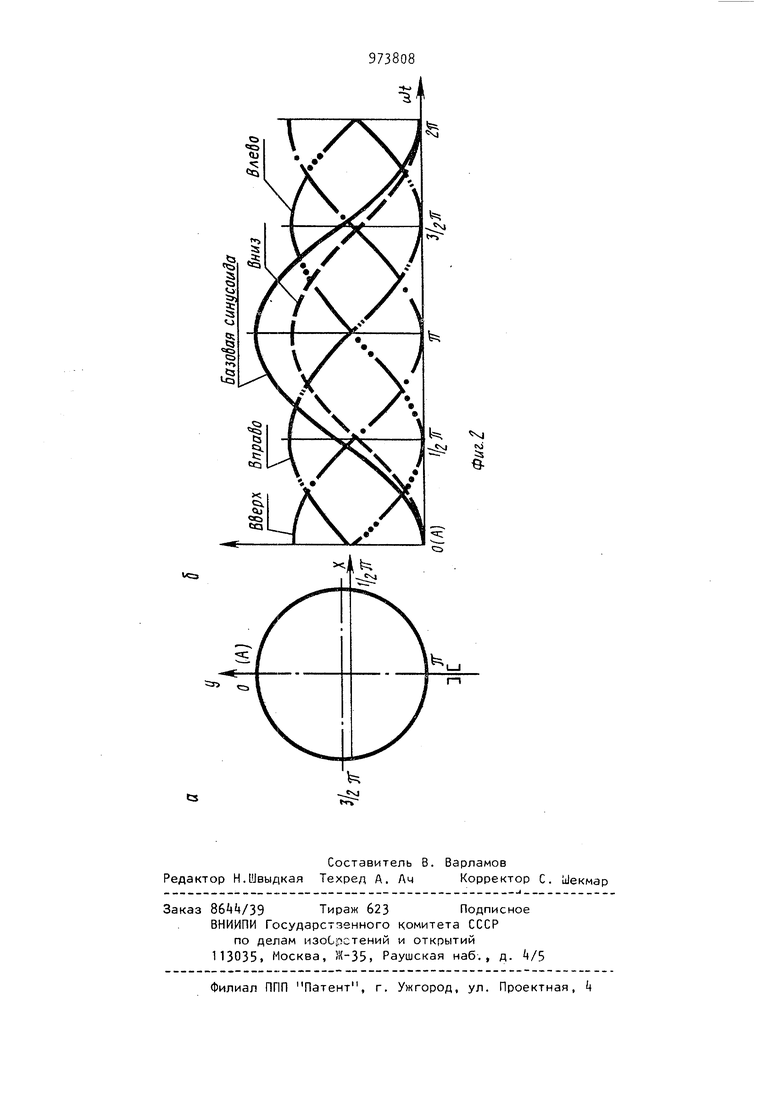
5 ся с остановкой процесса бурения, что снижает производительность, сложность задания начальной ориентации измерительных инструментов, гироскопические инклинометры, применяемые для измерения, боятся вибрации, ограниченность применения(для измерения отклонений в определенных пределах. В известном способе контроля положения инструмента в скважине определяется угол наклона измерительного инструмента, по крайней мере одного векторного компонента местного магнитного поля, азимутальный угол, истинные горизонтальные и вер тикальный компоненты магнитного поля 2. Однако поскольку способ основан на использовании геомагнитного и местного магнитного полей, это усложняет конструкцию измерительных приборов и процесс определения направления движения бурового инструмента. Цель изобретения - повышение точ ности , надежности и упрощение контроля направления движения в простра стве бурового снаряда или тросопро таскивателя по заданной траектории при вращающемся буровом ставе. Поставленная цель достигается тем, что измеряют угол отклонения между ними по амплитудному значению сигнала и определяют фазовый сдвиг между плоскостью измеренного угла и сигналом положения базовой плоскости. Контроль направления движения бурового снаряда или тросопротаски вателя, шарнирно соединенного с синхронно вращающимся с ним ставом, производится следующим образо В шарнир, соединяющий буровой снаряд со ставом, помещают датчик угла отклонения ( угол между осями бурового снаряда и става). Измерение угла отклонения можно осущес влять любым известным способом. По максимальной величине сигнала датчика определяют величину yi- ла отклонения. Для определения направления отклонения бурового снаряда задают фазовую нулевую (базовую) точку, от которой отсчитывают величину фазового сдвига максималь ного сигнала датчика угла отклонения, и по этой величине определяют направление отклонения бурового сн ряда от оси бурового става. Пример. На фиг. 1 представ лена лабораторная установка, обеспечивающая вращение става и снаряд отклонение снаряда относительно ст ва, задание нулевой фазой (, базовой точки, измерение угла отклонения снаряда относительно става и регис П рацию результатов измерений. Двигатель 1 через редуктор 2 вращает став 3 в подшипниковых опорах k. Снаряд 5 соединенный со ставом при помощи шарнира 6,. может отклоняться на заданный угол от оси става при помощи механизма 7Устройство для контроля направления движения снаряда состоит из эксцентрикового диска 8, жестко закрепленного на ставе 3, толкателя 9 с 10 и подвижным контактом 11 резистора 12, являющегося плечом измерительного моста 13, механизма i, который в зависимости от угла отклонения снаряда 5 может перемещать подвижный контакт 15 резистора 16, являющегося плечом измерительного моста 17 и регистрирующего блока 18, фиксирующего сигнала измерительных мостов 13 и 17. Устройство работает следующим образом. При вращении става 3 эксцентриковый диск 8 через толкатель 9, прижимаемый пружиной 10, перемещает подвижный контакт 11 резистора 12, и измерительный мост 13 выдает на регистрирующий блок 18 сигнал s виде базовой синусоиды (ЛИГ.2Р). В зависимости от угла отклонения снаряда 5 относительно става 3, происходит перемещение подвижного контакта 15 резистора 1б при помощи механизма Н связывающего вращающийся став 3 со снарядом 5- При этом сигнал с измерительного моста 17 также подается на регистрирующий блок 18. По максимальной величине сигнала измерительного моста 17 определяют величину угла отклонения снаряда 5 от оси ставаЗ, а по фазовому сдвигу максимальных величин сигналов измерительных мостов 13 и 17 определяют направление отклонения снаряда 5 от заданной нулевой точки А (фиг.2а). На фиг. 2 б приведены сигналы в виде синусоид при различных направлениях отклонения снаряда для определенного угла отклонения. Предлагаемый способ дает возможность контролировать направления движения по траектории с любым углом заложения и различной кривизной как в плоскости, так и в пространстве и в магнитных средах. Применение этого способа повышает точность, надежность и упрощает определение угла и направление отклонения бурового снаряда в процессе движения от заданной траектории, так как определение этих ве личин происходит при каждом обороте става, что дает возможность оператив но управлять направлением снаряда в процессе непрерывного движения. На точность измерений не оказывают влияния ни скорости вращения и подачи снаряда ни физико-механические свойства окружающей среды. Формула изобретения Способ определения направления движения бурового снаряда, соединенного с вращающимся буровым ставом, включающий определение угла отклонения бурового снаряда от оси става и направление отклонения, отличающийся тем, что с целью обеспечения непрерывного контроля положения бурового снаряда в пространстве в,процессе одновременного синхронного вращения бурового снаряда и бурового става, измеряют угол отклонения между ними по амплитудному значению сигнала и определяют фазовый сдвиг между плоскостью измеренного |угла и сигналом положения базовой плоскости, Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 60UOO, кл. Е 21 В k7/022, 1976. 2.Патент США № ТбЗЗа, кл. Е 21 В 47/022, опублик. 1979
