(54) СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального управления | 1980 |
|
SU894672A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Система экстремального регулирования | 1980 |
|
SU974338A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Система экстремального регулирования | 1977 |
|
SU686013A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| ФАЗОРЕГУЛЯТОР ДЛЯ ЭКСТРЕМАЛЬНОЙ СИСТЕМЫ С СИНХРОННЫМ ДЕТЕКТИРОВАНИЕМ | 1973 |
|
SU388246A1 |
| Устройство для определения моментов экстремума | 1982 |
|
SU1121650A1 |
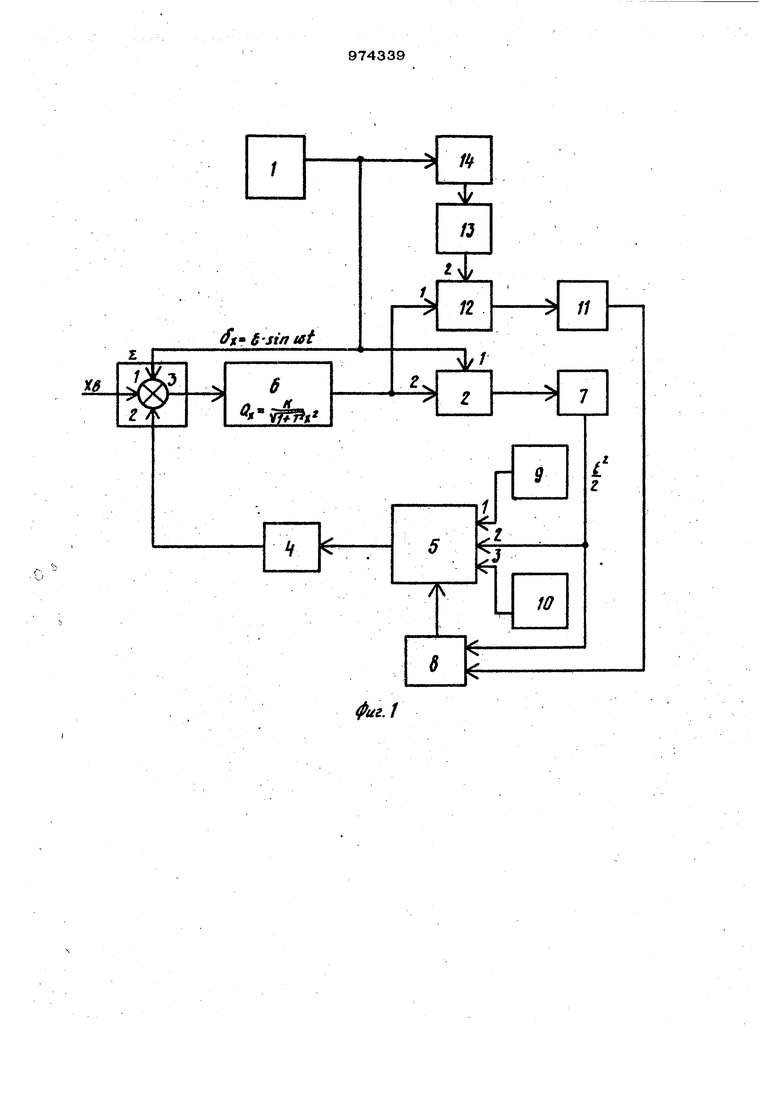
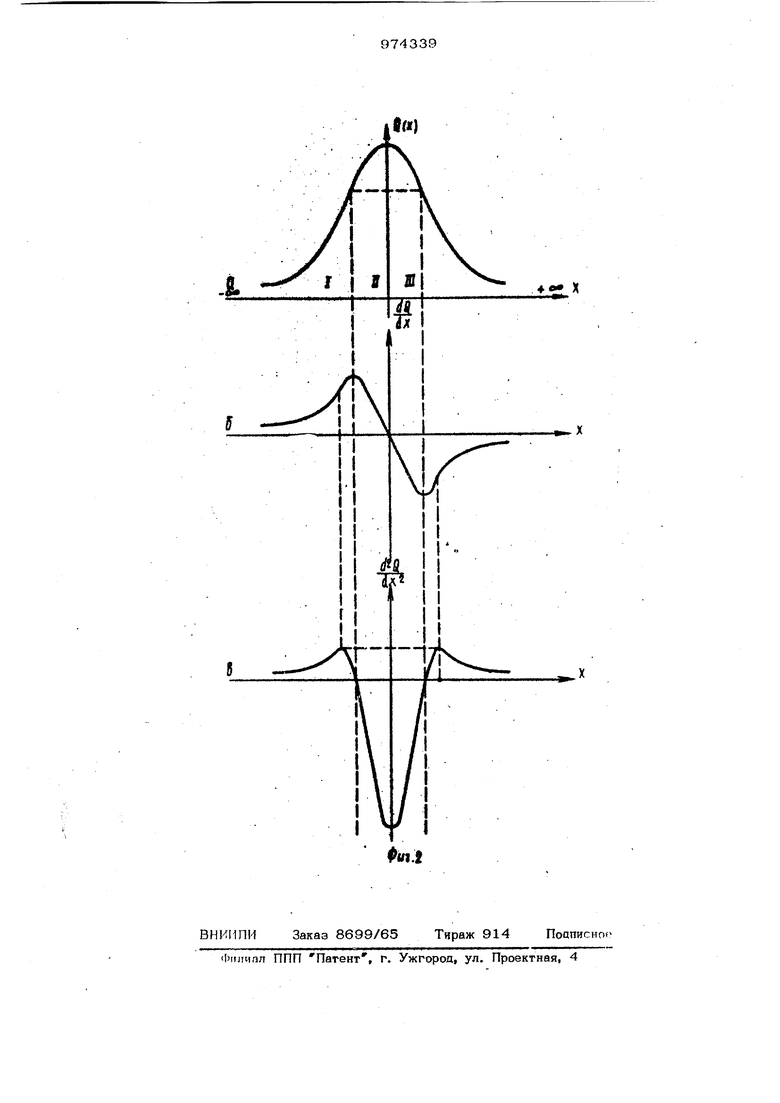
Изобретение относится к автоматичес кому управлению, в частности к устройствам для автоматического поиска экстремума. Известно устройство для автоматичес кого поиска экстремума, содержащее ге- нератор поискового сигнала, выход котор го соединен с первым входом блока умножения и первым входом сумматора, второй вход которого через исполнительный двигатель соединен с выходом блока умножения, а выход - со входом объекта управления, причем выход последнего соединен со вторым входом блока умно женин t} . Такая система обладает сравнительно низким быстродействием, обусловленным тем, что скорость выхода на экстремум пропорциональна значекмю первой производной экстремальной статической характеристики объекта управления, т.е. показателя качества, причем в дальней от экстремума области она монотонно воз растает до значения скорости в точке перегиба статической экстремальной характеристики объекта управления и затем в ближней области убывает до нуля Б точке экстремума. Наиболее близкой к предлагаемой по технической сущности является система, содержащая последовательно соединенные генератор поисковых сигналов, блок сравнения, объект управления, первый блок умножения и первый фильтр, второй вход блока сравнения соединен с выходом двигателя, первый вход блока сравнения цоединен со вторым входом первого блока умножения Г2 . В этой системе скорость выхода на экстремум также пропорциональна значеию первой пронзврдао.й статической экстремальной характеристики объекта правления, в связи с чем данная систе- via отличается низким быстродействием, особенно в дальней от экстремума обласUojibro изобретения является повьппе- ние быстродействия системьи Поставлешьая цель достигается тем, чт.о система содерясит первый и второй источинки максимального сиптала и последовательно соединенные удгюитель частоты, фазовращатель, второй блок умножения, второй фильтр, логический блок и переключатель, выход которого соеди- Heir со входом двигателя, второй вход - с выходом первого максимального сигнала, третий вход - с выходом второго источника максимального сигнала, а четвертый вход - с выходом перво( го фильтра и со вторым входом логического блока, выход объекта управлегшя соедгшеи со вторым входом второго блока укшожения, выход- генератора поисковых сигналов соединен со входом удвоите ля частоты . На фиг. 1 представлена структурная схема системы управления; на фиг. 2а характеристика объекта управления, имею щего монотонную симметричную харшстеристику Q ( X ) ; на .фиг. 26. и 2в - гра dG( фики изменения « соответстве но.° ах1 Структурная схема системы содержит гелератор поискового сигнала 1, выход которого соединен со вторым входом первого бло1Ш умножения 2, первым входомблока сравнения 3, второй вход которого через исполнительный двигатель 4 соединен с выходом переключателя 5, а выход - со входом объекта управления 6, выход которого соединен с первым входом первого блока умножения 2, выход которо го через первый фильтр 7 соединен с пер вым входом логического блока 8 и с четвертым информационным входом перекл.к)чателя 5, второй и третий информационные входы которого подключены соот ветственно к источш-цсам максимального сигнала 9 и Ю, а управляющий вход соединен с выходом логического блока 8, Буорой вход Которого через второй фильтр 11 соединен с выходом втррюго блока умножения 12, второй вход которого соединеч с выходом объекта управления 6, а первый вход через фазовращатель 13 и удвоитель частоты 14 - с выходом генератора поискового сигнала Система работает следующим образом С генератора 1 поисковые периодические колебания поступают на вход объекта упр авления 6, представляющего собой нелинейное безьшерционное звено с эк трёмальной характеристикой, например, вида (фиг. 2а) -входной сигнал объекта управления;;-постоянные коэффициенты; - амплитуда поискового сигнала; -круговая частота поискового сигнала; -время. Сигнал с выхода объекта 6 подается как на первый блок умножения 2, так и на второй блок ушюжения 12. Так как характеристика объекта Q (х) является достаточно гладкой функцией, ее можно разложить в степенной ряд и ограничиться первыми членами разложения ) а1х,.сЛ«|... После умножения выходногю сигнала объекта управления на поисковый сигнал, осуществляемое первым блоком умножения 2, получают Q (;( txj-fc)esinujt 3(х)ез1п tu-t + 2 7 e sin lot Усредняя данный сигнал, получают выражениеscx+e ujt) (J(X)esmui , характеризующее выход астатического фильтра 7, реализующего операцию интегрирования. Предполагая, что время осреднения достаточно велико, получают 4-| sVnuA О В силу ортогональности 0 Отсюда значение сигнала на выходе фильтра 7 пропорционально величине .первой производной экстремальной характеристикиQ(K-f eein uji)€sinuJt -у Во втором блокеумножения 12 осуществляют перемножение сигналов с выхода объекта и поискового, частоту которого при помощи удвоителя частоты 14 удваивают, а при помощи фазовращателя 13 сдвигают по фазе тла . Сигнал с вькода второго блока умножения 12. eG(xJcos2u t g --5inujicos2ujt+ + .1- c052iot« dx 8 (x-fesinujt)ecos2ujt осредняют при помощи астаткческого фильтра 11, получая на выходе фильтра 11 величину, пропориио1шльную второй производной экстремальной характеристики, т.е. : дЧ 0( u)t)Ec.os lU)t Сигнал с выхода астатического фильт ра 7, пропорциональный величине первой производной экстремальной характеристик и сигнал с выхода астатического фильт ра 11, пропорциональный второй произво ной, поступают на входы логического устройства 8, управляющего работой переключателя 5 в соответствие с таблицей следующим образом. Если система находится в 1 и ф (дальних) областях экстремальной характеристики о&ьекта фиг. 2 в, то на 2 и информационные входы переключателя 5 подают с источников максимального сигнала 9 и 10 соответственно ч Е fy, и -Буу,д., - постоянные сигналы, пропорцио нальные максимальной скорости выхода
Перши производная Вторая.производная
Подключаемые входы переключателя
Формула изобретения
Система экстремального управления, содержащая последовательно соединенные генератор поисковых сигналов, блок сравнения, объект управления, первый блок умножения и первый фильтр, второй вход блока сравнения соединен с выходом двигателя, первый вход блока сравнения . соединен со вторым входом первого блока умножения, отличающаяся теы что, с целью повышения бьютродействня. системы, она содержит первый и второй источники максимального сигнала и последовательно соединенные удвоитель частоты, фазовращатель, второй блок ум- ножения, второй фильтр, логический блок и переключатель, выход которого соединен со входом двигателя, второй вход - с выходом первого источника максималь4
ного сигнала, третий пход - с выходом второго источника максимального сигнала, а четвертый вход - с выходом первого фильтра и со вторым входом логического блока, выход объекта управления соединен со BTopbflvJ входом второго блока уь ноже- кия, вьшэд генератора поисковых сигналов соединен со входом удвоителя часто- тьи
Источники информации, принятые во внимание при экспертизе ,
1,Растригин Л. А. Системы экстремального управления. М., Наука, 1974, с. 177.
фиг. 1
