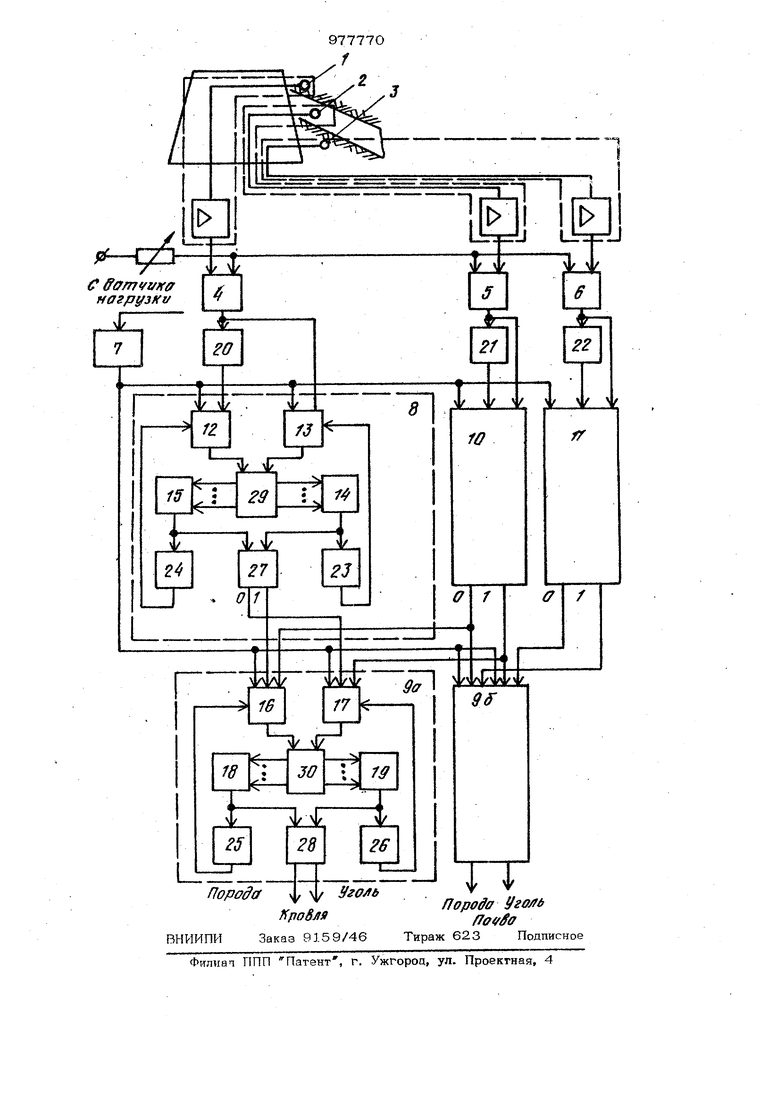
не измерении упругих волн, возникающих при работе .горной машины сейсмоакустическими датчиками, установленными в кровле (в лаве) и в массиве угольного пласта дополнительно определяют вероят ность превышения сигналами, получаемыми при рабочей нагрузке горной машины с кровли (почвы) и угольного массива одного и того же постоянного или изменяющегося по заданному закону уровня, сравнивают эти вероятности и по сигналу рассогласования судят о местоположении исполнительного органа относительно границы уголь-порода, причем положитель ный знак сигнала рассогласования соответствует. положению исполнительного органа в породе, а отрицательный в массиве угольного пласта. Известно устройство для контроля положения исполнительного органа горной машины относительно границы угольпорода, включающее сейсмоакустические датчики, усилители сигналов, пороговые блоки, генератор заполняющих импульсов цифровые интеграторы, включающие; логические элементы И, НЕ, ПАМЯТЬ и реверсивные счетчики ГЗ . Однако устройству присущи те же недостатки, что и способу.V Поставленная цель достигается также тем, что устройство снабжено двумя дополнительными цифров1ями интеграторами, причем выходы цифровых интеграторов, соответствующих сигналам, кровля(почва)-уголь, в противофазе подключены ко входам дополнительных цифровых интеграторов. Цифровые интеграторы выполнены в ви де схемы коммутации входов на элементах И, выходы которых подключены к входам реверсивного счетчика, а выходы последнего подключены к двум схемам совпадения, выходы которых соединены соответственно с входами элемента ПАМЯТЬ и через инверторы НЕ с вторыми входами элементов И схемы коммутации. На чертеже изображена блок-схема предлагаемого устройства. Способ контроля реализуется следующим образом. Пример 1. Пусть исполнительный орган горной машины движется вдоль границы уголь-порода кровли с оставлением пачки угля. Сейсмоакустические при емники 1 и 2, установленные в массиве угля и в пцэоде впереди забоя, воспринимакат sfvi,6aHnH, возбуждаемые исполнительт1ыл; , и преобразуют йх в ектр гческне сигналы. При цвижеиии ис полнительного органа в массиве угля колебания, распространяющиеся в этом массиве, по амплитуде больше, или равны колебаниям в породе, так как колебания в угле распространяются непосредственно от исполнительного органа, а для распространения в породу проходят через границу уголь-порода, т.е. границу раздела двух сред с разными физическими свойствами (крепостью, упругостью, анизотропностью)) где происходит частичное отражение колебаний в массив и про-чие явления, уменьщаклдие их амплитуду. Таким образом, если задать какойлибо определенный уровень и сравнить превышение этого уровня сигналами от сейсмоакустических приемников в угле и сейсмоакустических приемников в породе между собой, то при движении исполнительного органа в массиве угля превышение над заданным уровнем сигналом от сейсмоакустического приемника в массиве угля будет больше превышения над заданным уровнем сигналом от сейсмоакустического приемника в породе. Так как получаемые от сейсмоакустических приемников сигналы носят случайный характер, то для оценки их превышения над заданным уровнем необходимо вычислить общую длительность всех превышений над заданным уровнем за заданный промежуток времени, представляющую собой вероятность превышения сигналом над заданным уровнем, тогда, согласно чертежу. Для определения вероятности превышения сигналом над заданным уровнем P{f(t)Xo), где АО - заданный уровень; необходимо вычислить сумму всех превышений Л . за промежуток времени Tj . Вычисляются отдельно вероятности превышения сигналом над заданным уровнем от сейсмоакустического приемника в уг- ле Р (t) Хо,голь превышения сигналом над заданным уровнем от сейсмоакустического приемника в породе (Ь) эти вероятности сравнивают между собой, и в случае наличиязависимости P{f Ct-) Хо}уголь Р { f tt) XojnoPOAa исполнительный орган движется по границе уголь-порода кровли с оставлением пачки угпя. В устройстве для реализации предлагаемого способа воспринимаются сейсмоакустическими приемниками с усилителями 1 и 2 затем полученные сигналы сравниваются с заданным уровнем в. tiopo говых устройствах 4 и 5. Вероятность превышения сигналом из породы кроной над заданным уровнем вычисляется в циф ровом интеграторе 8, а вероятность превышения сигналом из угольного массива над заданным уровнем вычисляется в циф ровом интеграторе Ю. Далее обе полученные вероятности сравниваются в цифровом интеграторе 9 cj , на выходе которо го индикация укажет, что исполнительный орган горной машины находится в массиве угля. Пример 2, Пусть исполнительный орган горной машины производит при сечку породы кровли, например, около 2 см Сейсмоакустические приемники 1 и 2, установленные в массиве угля и в породе впереди забоя, воспринимают колебания, возбуждаемые исполнительным ор- ганом, и преобразуют их в электрические сигналы. При присечке исполнительным органом породы кровли колебания, распространяющиеся в породе, по амплитуде и частоте больше колебаний в массиве угля, так как воспринимаемью сейсмоакустическими приемниками колебания .распространяются непосредственно в породе кровли и в массиве угля, т.е. не проходят через границу уголь-порода, а крепость породы выше чем, крепость угля. Таким образом, при движении исполнительного органа с присечкой породы превышение над заданным уровнем сигналом от сейсмо акустического приемника в породе кровли выше, чем превышение над заданным уровнем сигналом от сейсмоакустического приемника в массиве угля. Если вероятность превышения сигналом кз массива угля над заданным уровнем и вёроятность превышения сигналом из породы кровли над заданным уровнем подчинякзтся зависимости Р §(t)Xg () I исполнительный opган производит присечку породы. В устройстве для реализации предлага емого способа колебания воспринимаются сейсмоакустическими приемниками с усилителями 1 и 2, затем полученные сигналы сравниваются с заданным уровнем в пороговых устройствах 4 и 5, Вероятности превышения сигналом из породы кровли над заданным уровнем вычисляется в цифровом интеграторе 8, а вероятчность превышения сигналом из угольного массива над заданным уровнем вычисляется в цифровом интеграторе Ю Далее обе полученные вероятности сравниваются в цифровом интеграторе 9а,на выходе которого индикация укажет, что исполнительный орган горной машины производит присечку породы. Устройство, реализуюшее способ, содержит Сейсмоакустические датчики 1-3 с усилителями, пороговые устройства 4-6, генератор 7 заполняющих импульсов, автоматические цифровые интеграторы 8- 11, включающие логические элементы И 12-19, логические элементы НЕ 20-26, логические элементы ПАМЯТЬ 27 и 28 и реверсивные счетчики 29 и ЗО. Устройство работает следующим образом. Сигналы с сейсмоакустических датчиков с усилителями 1-3 поступают на пороговые устройства 4-6. С выхода пороговых устройств сигналы поступают на логические элементы И 13, а с элементов НЕ сигналы поступают на логические элементы И 12, т.е. в логический элемент-И 13 поступают сигналы, амплитуды которых превышают заданный уровень, сформированные пороговыми устройствами в виде прямоугольных импульсов, а в логический элемент И 12 эти же импульсы, но только инвертированные. В этих элементах производится заполнение вышеуказанных импульсов импульсами высокой частоты с генераторм 7 запол няющих импульсов. Затем сформированные суммарные импульсы поступают в реверсивный счетчик 29. При этом, если сигнал с усилителя вьпие заданного порогового импульса, то. заполняющие сигналы с генератора заполняющих импульсов через элемент И 13 поступают на суммирующий вход реверсивного счетчика 29, в противном случае эти импульсы через элемент И 12 проходят на вычитакиций вход счетчика 29. Таким образом, если сигнал, например, с кровли, превысит установленный уровень сигнала в течение заданного времени (или больше), то в реверсивном счетчике 29 накапливается соответствующее количество импульсов и на выходе элемента И 14 появится сигнал, который устанавливает в единичное положение элемент ПАМЯТЬ 27. а также через элемент НЕ 23 и элемент И 13 блокируют дальнейшее поступление импульсов на суммирующий вход реверсивного счетчика 29. Если же теперь сигнал с датчика в кровле станет ниже заданного уровня, то заполняющие импульсы с генератора 7 заполняющих импульсов через элемент И 12 поступат на вычитающий вход реверсивного счетчи ка 29. Когда промежуток времени, в течение которого сигнал с датчика кровли будет меньше заданного уровня, достигнет определенной величины, на выходе элемента И J.5 появится сигнал, который перебросит элемент ПАМЯТЬ 27 в исходное (нулевое) состояние. Следовательно, автоматический цифровой интегра тор 8 осуществляет непрерывное автоматическое слежение за длительностью превышения сигнала над заданным уровнем или длительностью, в течение которой сигнал меньше заданного уровня, т.е. автоматический цифровой интегратор 8 вычисляет вероятность превышения сигнала, получаемого при рабочей нагрузке горной машины, с кровли над заданным уровнем. Соответственно этому на выходе элемента ПАМЯТЬ 27 получают импульсы, длительность которых пропорциональна длительности, в течение которой поступающий сигнал выше или ниже заданного уровня. Аналогичным образом работают автоматические интеграторы Ю и 11, обрабатывая сигналы с датчиков в угольном массиве и почве. Выходные сигналы автоматических цифровых интеграторов 8, 10 и Ю, 11 подаются -на две дополнительных автоматических цифровых интегратора 9. В част ности, с единичного выхода элемента ПА МЯТЬ 27 и с нулевого выхода элемента ПАМЯТЬ автоматического цифрового интегратора 1О, а также с нулевого выхода элемента ПАМЯТЬ 27 и единичного выхода элемента ПАМЯТЬ автоматического цифрового интегратора Ю сигналы подаются соответственно на элементы И 16 и 17, на которые поступают также импульсы генератора заполняющих импуль сов. Выходнью сигналы элементов И 16, и 17 подаются соответственно на суммирующий и вычитающий входы реверсивного счетчика 30 автоматического цифрово го интегратора 9. Последний, аналогично описанному выше, осуществляет сравнени вероятностей противоположного события для сигналов, поступающих с датчиков в кровле и в угольном пласте, в частности при равенстве указанных вероятностей на выходе элементов И 16 и 17 будут нулевые сигншты в реверсивный счет ик 30 с генератора 7 заполняющих импульсов последние не поступают. Если же длительность превышения сигналом с дат чика в кровле над заданным уровнем бол ше, чем длитетПг.иость провышения сигналом с датчика в угольном пласте над этим же уровнем, то на суммирующий вход реверсивного счетчика ЗО начинают поступать импульсы с генератора 7 заполняющих импульсов. При достижении длительности превышения заданного уровня в реверсивном счетчике О О накапливается определенное количество импульсов и на -выходе схемы элемента И 18 появляется сигнал, устанавливающий выходной элемент ПАМЯТЬ 28 автоматического цифрового интегратора 9 в состояние Порода, а также через элемент НЕ 25 и элемент И 16 блокируют дальнейшее поступление импульсов на суммирующий вход реверсивного счетчика 30. В случае, когда вероятность превышения сигналом с массива угольного пласта над заданным уровнем больше, чем соответствующая вероятность сигнала, поступающего с датчика в кроше, то импульсы генератора 7 заполняющих импульсов через элемент И поступают на вычитающий вход реверсивного счетчика 30. Как только эта разность достигнет заданной величины, то из реверсив,ного счетчика 30 автоматически вычтется заданное количество импульсов и на выходе элемента И 19 по$гоится сигнал, который установит элемент ПАМЯТЬ 29 в состояние Уголь , Одновременно этот же сигнал через элементы НЕ 26, И 17 заблокирует дальнейшее поступление импульсов на вычитающий вход реверсивного счетчика 30. Аналогично работают автоматические цифровые интеграторы 95,10, 11 при обработке сигналов, поступающих с угольного массива и почвы. Основной положительной особенностью предлагаемого способа и устройства является высокая информативность процесса контроля, обеспечиваемая интегральной обработкой поступающих сигналов, а также высокой точностью сравнения результатов вычислений, осуществляемых автоматически непосредственно в процессе поступления сигналов от сейсмоакустических датчиков, установленных в кровле, почве и угольном массиве. Реализация предлагаемого устройства на современной микроэлектронной базе обеспечивает высокую надежность, приемлемые габариты и искробезопасность аппаратуры контроля. Формула изобретения 1, Способ контроля попожения исполнительного органа горной . шшины относительно границы уголь-порода, основанный на измерении упругих волн, возникающих при работе горной машины, сейсмоакустическими датчиками, установленными в кровле (в почве) и в масриве уголь ного пласта, отличающийся тем, что, с целью повышения точности контроля границы уголь-порода, определяют вероятность превышения сигналами, получаемыми при рабочей нагрузке горной машины с кровли (почвы) и угольного массива, одного н того же постоянного или изменяющегося по заданному закону уровня, сравнивают эти вероятности и по сигналу рассогласования судят о местоположении исполнительного органа относительно границы угояь-порода, причем положительный знак сигнала рассогласования соответствует, положению исполнительного органа в псфоде, а отрицательный - в массиве угольного пласта. 2. Устройство для ксятррля положения исполнительного органа горной машины относительно границы уголь-порода,включающее сейсмоакустические датчики, усилителн сигналов, пороговые блоки, генератор заполняющих импульсов, цифровые интеграторы, включающие логические элементы И, НЕ, ПАМЯТЬ и реверсивные счетчики, отличающееся тем,
что, с целью повьпиения точности контроля, оно снабжено двумя дополнительными цифровыми интеграторами, тричем, выходы цифровых интеграторов, соответствую- щнх сигналам кровля-(почва)-уголь, в противофазе подключены к входам дополнительных цифровых интеграторов.
3. Устройство по п. 2, о т л и ч а ю щ е е с я тем, что цифровые интеграторы выполнены в виде схемы коммутации на элементах И,входы которых подключены к входам реверсивного счетчика, а выходы последнего подключены к двум схемам совпадения, выходы кото-г рых соединены соответственно с входами элемента ПАМЯТЬ и через инверторы НЕ - с вторыми входами элементов И схемы ксллмутации.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 149895, кл. Q O1V 1/О8, 1961.
2.Авторское свидетельство СССР
№ 585287, кл. Е 21 С 35/24, 1977.
3.Создание опытного образца аппаратуры автоматического управления комбайнами по границе уголь-порода с сейсмоакустическими и радиоволновыми датчи ками. Отчет hfe Б245386. Автоматтормаш. Донецк, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля положения исполнительного органа горной машины относительно границы уголь-порода | 1981 |
|
SU964133A1 |
| Способ мониторинга процесса разрушения горных пород в массиве и автоматизированная система для его осуществления | 1989 |
|
SU1645514A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1982 |
|
SU1063998A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Способ и система сейсмоакустического контроля массива горных пород | 2023 |
|
RU2809469C1 |
| Способ контроля положения исполнительного органа горной машины относительно границы порода - уголь | 1987 |
|
SU1513142A1 |
| СПОСОБ ДИАГНОСТИКИ ОПАСНЫХ СИТУАЦИЙ ПРИ ПОДЗЕМНОЙ ДОБЫЧЕ КАМЕННОГО УГЛЯ И МЕТОДИКА ПРОГНОЗА ПАРАМЕТРОВ ЗОН ТРЕЩИНОВАТОСТИ, ОБРАЗОВАННОЙ ГИДРОРАЗРЫВОМ ПЛАСТА | 2011 |
|
RU2467171C1 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ ИЗМЕНЕНИЙ КОНЦЕНТРАЦИИ НАПРЯЖЕНИЙ ВПЕРЕДИ ФРОНТА ОЧИСТНОЙ ЛАВЫ | 2014 |
|
RU2604532C2 |
| Способ оценки напряженного состояния массива горных пород и устройство для его осуществления | 1983 |
|
SU1209859A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |