Изобретение относится к автоматизации производственных процессов в угольной промышленности, а именно к способам контроля положения исполнительного органа горной машины относительно границы порода - уголь.
Целью изобретения является повьше- ние точности контроля.
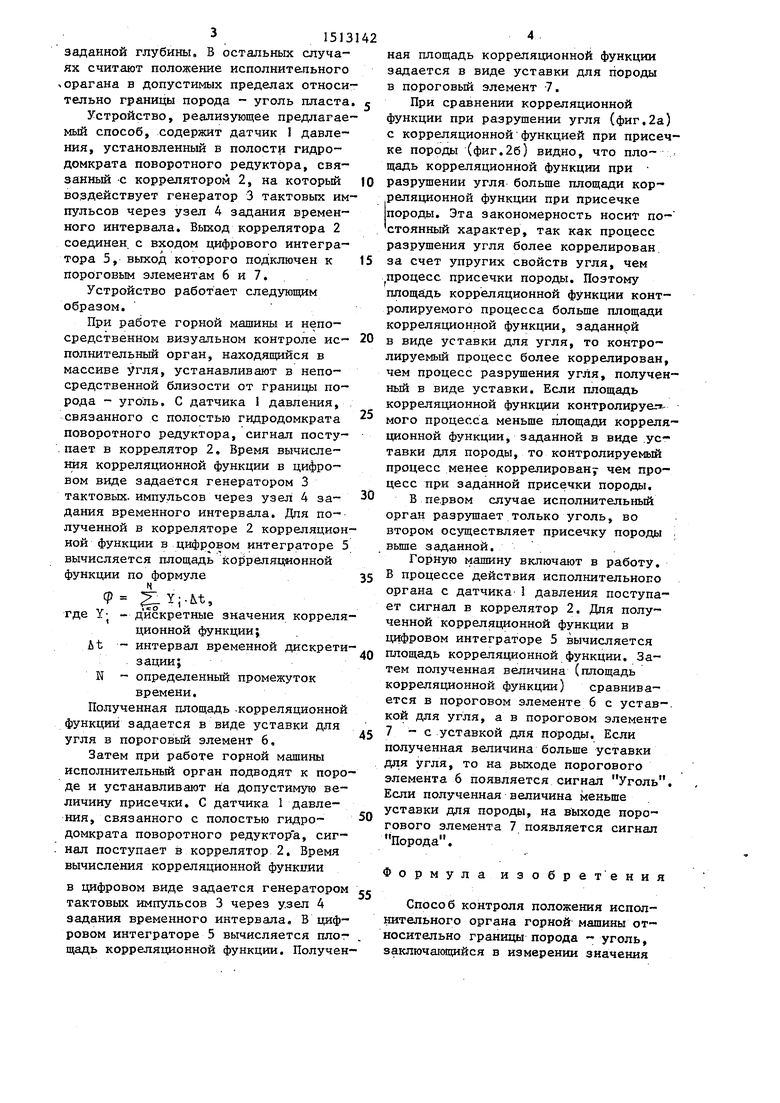
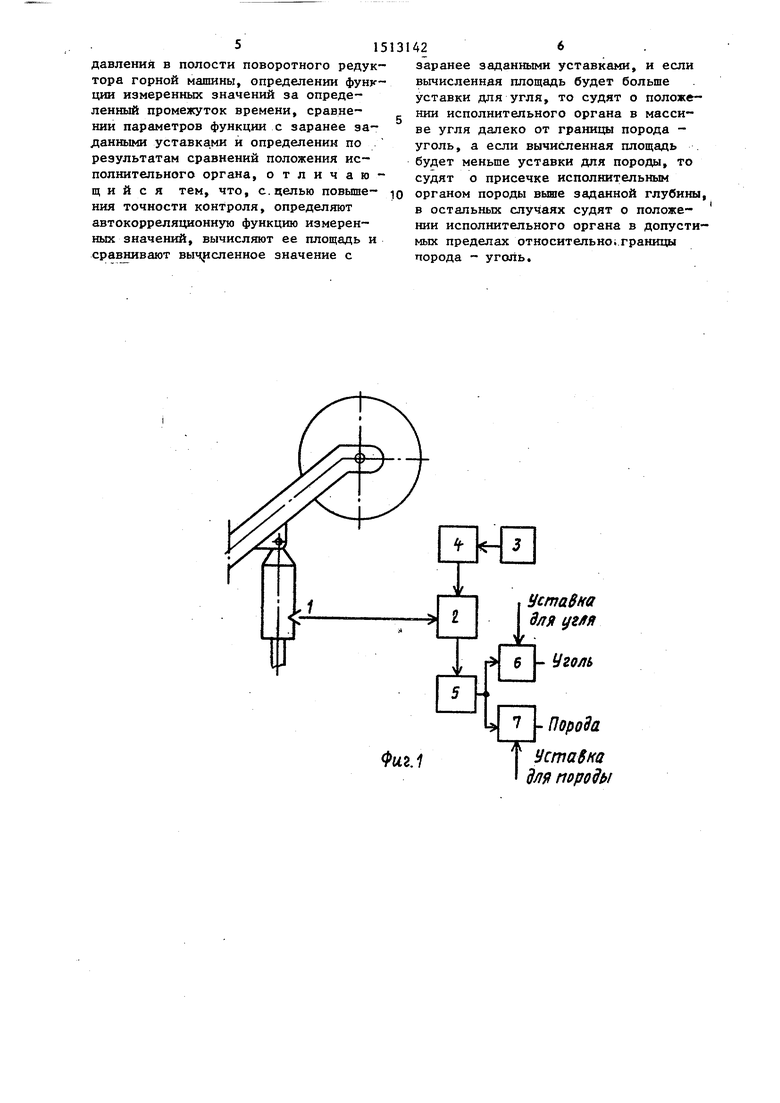
На фиг.1 представлена схема уст- . ройства, реализующего предлагаемый способ; на фиг.2 - экспериментально полученные автокорреляционные функ- .; ции при разрушении исполнительным органом угля без присечки породы (а) и с присечкой породы (б).
Сущность изобретения заключается в том, что изменяют давление в полости поворотного редуктора гидродомкрата и по полученным значениям опреде- . ляют автокорреляционную функцию. Затем вычисляют ее площадь и сравнивают полученные значения площади автокорреля- ляционной функции с заранее заданными уставками. Если вычисленная площадь больше уставки для угля, то судят о ,положении исполнительного органа далеко от границы порода - уголь. Если вьгчи&енная площадь меньше уставки для породы, то удят о присечке исполнит ель ньм органом породы выше
С71
:с
ю
31513142
аданной глубины. В остальных случах считают положение исполнитепьного рагана в допустимых пределах относиельно границы порода - уголь пласта.
Устройство, реализующее предлагаеый способ, содержит датчик 1 давлеия, установленный в полости гидроомкрата поворотного редуктора, свяанный с коррелятором 2, на который |0 воздействует генератор 3 тактовых импульсов через узел 4 задания временного интервала. Выход коррелятора 2 соединен, с входом цифрового интегратора 5, выход которого подключен к 15 пороговым элементам 6 и 7.
Устройство работает следующим образом.
При работе горной машины и непосредственном визуальном контроле ис- 20 полнительный орган, находящийся в массиве угля, устанавливают в непосредственной близости от границы порода - угоЛь. С датчика 1 давления, связанного с полостью гидродомкрата поворотного редуктора, сигнал посту- пает в коррелятор 2, Время вычисления корреляционной функции в цифровом виде задаётся генератором 3 тактовых, импульсов через узел 4 за- 30 Дания временного интервала. Для полученной в корреляторе 2 корреляционной функции в цифровом интеграторе 5 вычисляется площадь ко15реляцяонной функции по формуле35
Ф JlYj.t,
где Y- - дискретные значения корреляционной функции;
it - интервал временной дискретизации}N - определенный промежуток
времени.
Полученная площадь -корреляционной функции задается в виде уставки для угля в пороговый элемент 6.
Затем при работе горной машины исполнительный орган подводят к породе и устанавливают на допустимую величину присечки, С датчика 1 давления, связанного с полостью гидро- домкрата поворотного редуктор а, сиг- нал поступает в коррелятор 2. Время вычисления корреляционной функции
в цифровом виде задается генератором -с тактовьпс импульсов 3 через узел 4 задания временного интервала, В цифровом интеграторе 5 вычисляется плог щадь коррелящюнной функции. Получен40
45
0 5
с
0
5
ная площадь корреляционной функции задается в виде уставки для породы в пороговый элемент 7.
При сравнении корреляционной функции при разрушении угля (фиг.2а) с корреляционной функцией при присеч- ке породы (фиг.26) видно, что пло- : щадь корреляционной функции при разрушении угля больше площади корреляционной функции при присечке породы. Эта закономерность носит по- стоянный характер, так как процесс разрушения угля более коррелирован за счет упругих свойств угля, чем процесс присечки породы. Поэтому площадь корреляционной функции контролируемого процесса больше площади корреляционной функции, заданнрй в виде уставки для угля, то контролируемый процесс более коррелирован, чем процесс разрушения угля, полученный в виде уставки. Если площадь корреляционной функции контролируег - мого процесса меньше площади корреляционной функции, заданной в виде .уставки для породы, то контролируемый процесс менее коррелирован чем процесс при заданной присечки породы.
В первом случае исполнительный орган разрушает только уголь, во втором осуществляет присечку породы выше заданной.
Горнзто машину включают в работу. В процессе действия исполнительного органа с датчика J давления поступает сигнал в коррелятор 2. Для полученной корреляционной функции в цифровом интеграторе 5 вычисляется площадь корреляционной функции. Затем полученная величина (площадь корреляционной функции) сравнивается в пороговом элементе б с устав-, кой для угля, а в пороговом элементе 7 - с уставкой для породаг. Если полученная величина больше уставки для угля, то на выходе порогового элемента 6 появляется сигнал Уголь. Если полученная величина меньше уставки для породы, на выходе порогового элемента 7 появляется сигнал Порода.
Формула изобретения
Способ контроля положения исполнительного органа горной машины относительно границы порода уголь, заключающийся в измерении значения
515131
давления в полости поворотного редуктора горной машины, определении функции измеренных значений за определенный промежуток времени, сравнении параметров функции с заранее заданными уставками и определении по результатам сравнений положения исполнительного органа, отличающийся тем, что, с.целью повышения точности контроля, определяют автокорреляционную функцию измеренных значений, вычисляют ее площадь и сравнивают выч исленное значение с
0
426
заранее заданными уставками, и если вычисленная площадь будет больше уставки для угля, то судят о положении исполнительного органа в массиве угля далеко от границы порода - уголь, а если вычисленная площадь будет меньше уставки для породы, то судят о присечке исполнительным органом породы выше заданной глубины, в остальных случаях судят о положении исполнительного органа в допустимых пределах относительно;границы порода - уголь.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля положения исполнительного органа горной машины относительно границы порода-уголь | 1986 |
|
SU1382951A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы уголь-порода и устройство для его осуществления | 1980 |
|
SU977770A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы "уголь-порода" и устройство для его осуществления | 1980 |
|
SU898058A1 |
| Устройство контроля положения исполнительного органа горной машины относительно границы уголь-порода | 1981 |
|
SU964133A1 |
| Устройство контроля положения исполнительного органа комбайна относительно границы уголь-порода | 1981 |
|
SU987095A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ КОНТРОЛЯ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ИЗДЕЛИЯ | 2009 |
|
RU2413179C2 |
| Устройство автоматического управления исполнительным органом очистного комбайна по гипсометрии пласта | 1984 |
|
SU1245701A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2003 |
|
RU2243591C1 |
Изобретение относится к автоматизации производственных процессов в угольной промышленности. Цель изобретения - повышение точности контроля положения исполнительного органа (ИО) горной машины. Для этого измеряют давление в полости гидродомкрата поворотного редуктора и получают автокорреляционную функцию (АКФ) полученных за некоторый промежуток времени значений давления. Затем вычисляют площадь полученной АКФ и сравнивают вычисленное значение площади с заранее заданными установками, характеризующими допустимые глубины присечки. По результатам сравнения судят о положении ИО горной машины относительно границы порода - уголь. При площади АКФ, большей установки для угля, ИО находится далеко от границы порода - уголь. При площади АКФ, меньшей установки для породы, судят о присечке ИО породы выше заданной глубины. В остальных случаях ИО находится в допустимых пределах относительно границы порода - уголь. 2 ил.
, УстаВна для gi/m
- Уголь
UZ.1
-
Т Уста6ка для
s у
Ц}1/г.1
| Пресс для изготовления строительных камней | 1925 |
|
SU2343A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы "уголь-порода" и устройство для его осуществления | 1980 |
|
SU898058A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
