(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ
ИСПОЛНИТЕЛЬНОГО ОРГАНА МАШИНЫ
В ПРОФИЛЕ ПЛАСТА Изобретение относится к горной проМБШшенности, а именно к авт6матй эации Управления положением горных машин в профиле .пласта. Известно устройство для уПЕ)авлеНИН положением иеполиительмого орга на ГОРНОЙ машины в профиле пласта, например режущий барабан для горных машин, содержаиций установленный на йспо;1нительном органе датчйй порода-уголь и установленный на корпусе машины электронный бЛок обработки информации 1. Это устройство не обеспечиваем надежной работы из-за наличия кoJiлe торной передачи информации с исполнительного органа на корПудГО:)11ой машины. Известно также устройство для управления положением йсполйительного органа: горной машины в профи-, ле пласта, содержащее усТановленнйе на Исполнительном органе датчик по рода-уголь, синхродатчик, взаимодействующий с исполнительным органом, электронный блок передачи инфо мации, включающий автономный источник питания и передатчик, иустанов ленные на корпусе машины приемный блок, электронный блок обработки ин формации , включающий цифровой счет- . ный и врёмяЭадающий блоки, исполнительные блоки 2. Однако из-за подвижно установленного на вращающемся валу синхродатчика мЬмент начала зоны измеренй я и момент окончания измерения не могут быть точно зафиксированны. Это влияет как на величину зоны измерения, так и на ее положение относительно границы угольного пласта, что значительно снижает точность управления исполнительным органом. Кроме того, в известном устройстве не обеспечивается возможность корректировки величины зоны измерения датчика порода-уголь, что не позволяет оперативно изменять величину контролируемого расстояния от линии резания исполнительного органа до границы угольного пласта. Последнее особенно важно тогда, когда в зависимости от горногеологических условий в лаве необходимо изменять зону измерения, чтобы уменьшить присечку породы. Установленные на исполнительном органе и питающиеся от автономного источника датчик порода-уголь и передатчик непрерывно потребляют электроэнергию независи1 ю от положения датчика порода-угол как при работающей, так и при отключенной машине, что ведет к излишнему расходу электроэнергии/ сокращению срока службы автономного источника 11итания и снижению надежности устройства.
Цель изобретения - повыиение точности управления.
Цель достигается тем, что устройство снабжено электронным ключом, блоком Задержки, задатчиком ширины зоны измерения, расположенными в электронном блоке обработки информации, датчиком концевых положений и исполнительного органа, размещенными на корпусе машины, и реле времени , расположенным в электронном блоке передачи информации и связанным по входу с синхродатчиком, а по выходу - с цепями питания датчика порода-уголь и передатчика, а приемный блок соединен с цифровым счетным блоком через электронный ключ, входы управления которого подключены соответственно к выходам блока задержки и времязадающего блока, соединенного первым входом управления с выходом блока задержки, первый вход управления которого подключен к выходу приемного блока, причем датчик кбнцевйх положений исполнительного органа подключен к задатчику, соединенному со вторыми входами упраления блока задержки и времязадающег
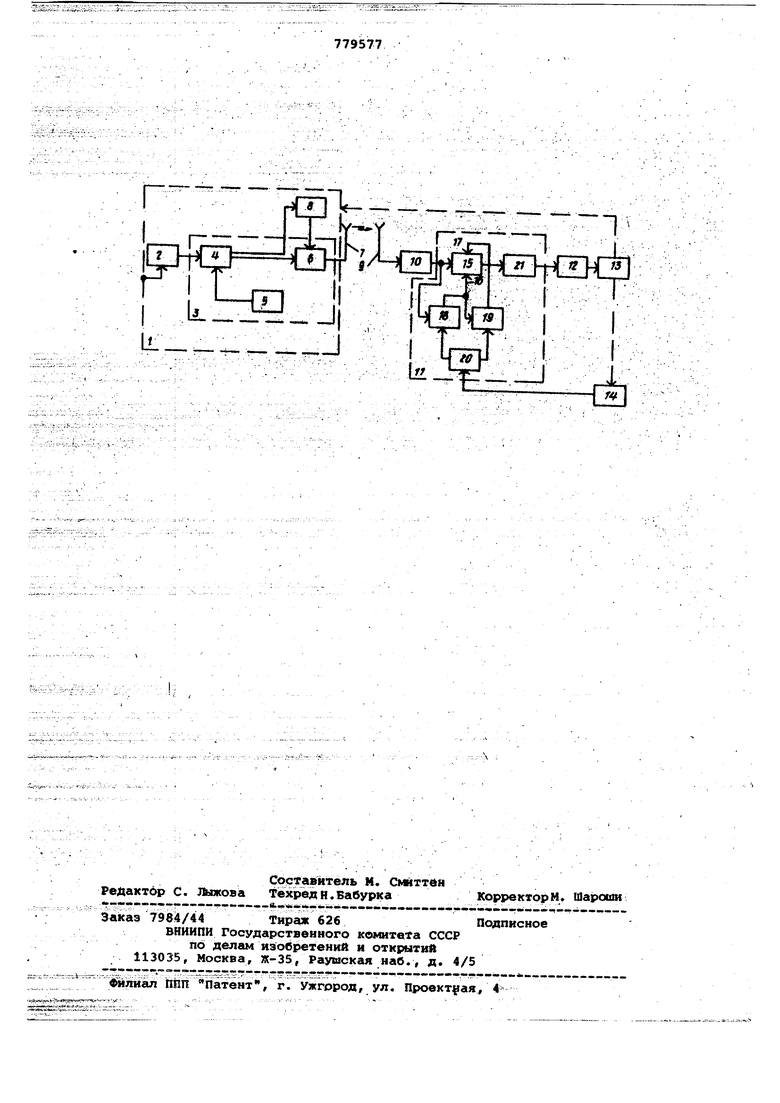
блока., .,, ,. ,„-,.,., .- .- - „-. -.-На чертеже приведена структурная схема устройства.
На вращакадемся исполнительном органе 1 го)рной машины размещены .синхродатчик 2, электронный блок 3 передачи информации, включакяций реле 4 времени, блок 5 питания и Ъередатчйк 6, например радиопередатчик с излучающей антенной 7, и датчик породА-уголь 8.
Синхродатчик 2, например ртутный или магнитоуправляелвлй контакты, ndin:ключен к реле 4 времени, которое получает питание от источника 5 питания. Вйходнйе цепи реле 4 времени .подключены к цепяМ питания передатчика б с антенной 7 и к датчику порода-уголь 8.
На корпусе машины размещены приемная антенна 9, приемный блок 10, элёК гроннШ блок 11 обработки информации, исполнительные элементы 12, сервопривод 13 и датчик 14 концевых положений исполнительного органа 1. Электронный блок 11 обработки инфорМёщйи включает электронный ключ 15 с двумя вхЬда1ми управления 16 и 17, соответственно подключенными к выходам блока 18 задержки и времязалающего блока 19, соединенного первым входом управления с выходЬм 15Шка; . 18 задержки, первый вход управления которого в свою очередь подключен к выходу приемного блока 10. Датчик
14концевых положений подключен к задатчику 20, соединенному со вторыми входами управления блока 18 задержки и время эадаюсце го блока 19. Приемный блок 10 через электронный
. ключ 15 подключен к цифровому счётному блоку (счетчику) 21, выход когторого соединен с исполнительными элементами 12.
При расположении исполнительного органа 1 на консольном редукторе может быть два режима работы:по почве пласта при движении машины в одном направлении или по кровле пласта при движении машины в другом направлении. При жестком расположении исполнительного органа 1 на корпусе машины может быть только один из упомянутых режимов работы.
При первом режиме (по почве пласта) устройство работает следующим
0 образом.
Синхродатчик 2, размещенный в исполнительном о згане 1, закреплен на нем так, что его .контакт заг кается в фиксированной точке при вращении
5 исполнительного органа 1 при подходе датчика уголь-порода 8 к кровле пласта, .а отключается в другой фиксированной точке после прохода датчиком уголь-порода 8 кровли пласта. При замыкании контакта синхро0 дЙ1ТЧи ка 2 включается реле 4 времени, которое подключает к источнику 5 питания передатчик 6 и датчик порода-уголь 8, например радйоизотопный датчик. Реле 4 времени настроено так, чтЬ оно отключается только лишь после Прохода датчиком порода-уголь 8 зоны измерения у почвы пласта. Выдержка времени реле определяет максимальную величину зоны
0 работы устройства, а синхродатчик - начало этой зоны. : , Сигнал передатчика б, модулированный сигналом датчика породауголь 8, излучаетс я антенной 7, 5 принимается приемной антенной 9 и поступает на вход приемного блока 10. Обработанный в приемном бЛоке 10 сигнал поступает йа электроньмй ключ
15и на блок 18 задержки. Через 0 заданный интервал времени, равный
времени задержки, на выходе блока 18 задержки появляется управляющий сигнал, поступающий на разрешающий вход
16эл.ектронного ключа 15 и на вход :5 вр1емязадающего блока 19.
Электронный кЛюч 15 открывается, и сигнал с приемного блока 10 поступает на цифровой очет.ный блок 21. Этот момент является началом зоны измерения и сботвётствует нахождению датчика порода-уголь 8 у почвы пласта на подходе к границе раздела пласта, т. е. блок 18 задержки задерживает прохождение сигнала от дат, чика порода-уголь 8 в цифровой счетный блок 21 до подхода датчика порода-уголь к зоне измерения у почвы пласта. По истечении времени выдержки вре мяэадаюадего блока 19, т. е. .при выхо де датчика порода -уголь 8 из зоны измерения у почвы пласта ,на его выходе появляется сигнал, поступающий на запрещающий вход 17 электронного ключа 15. Прохождение сигнала на циф ровой счетный блок 21 от приемного блока 10 прекращается. Следовательно интервал времени между появлением . сигналов на выходах блока 18 задержки и времязадающего блока 19 определяет зону измерения, ее ширину, кото рая задается задатчиком 20. Выходной сигнал датчика породаУГОЛЬ 8, например радиоизотопного, представляет собой последовательность импульсов, частотаследования которых пропорциональна толщине угольной пачки и зависит от рода мат риала (уголь или порода). Количество импульсов, поступающее от передатчика 6 через приемный блок 10 и электронный ключ 15 в цифровой счетный блок 21 за один оборот исполнительного органа 1, зависит как от толщины угольной пачки и рода материала, так и от ширины зона измерения. При превышении зафиксированным ко личеством импульсов заданной величин цифровой счетный блок 21 выдаетсигнал на соответствующий исполнительный механизм 12, включающий сервопри вод 13, опускающий исполнительный ор ган 1 комбайна в сторону почвы пласта. При этом уменьшается толщина угольн ой пачки под датчиком порбда-уголь 8, что приводит к уменьшению количества импульсов, .поступающих за один оборот исполнительного органа 1 на Цифровой счетный блок 21 При уменьшении количества 11:мпульсов по сравнению с заданной величино цифровой счетный блок 21 выдает сигнал, приводящий к подъему испол.-. нительного органа 1 и увеличению тол щины пачки угля под датчиком порода уголь 8. Изменяя.ширину зоны измерения при помощи задатчика 20, представляется возможным настраивать устройство на обеспечение требуемого положения исполнительного Органа в профиле .пласта, т. е. работать с оставлением Определенной толщины пачки угля или с присечкбй породы. При работе исполнительного органа п.окровле пласта датчик 14 концевых положений, срабатывающий при перемещении Исполнительного органа к кровле пласта, воздействует на задатчик 20, изменякяций время задержки блока 18 задержки и выдержку времени времязадающего блока 19. Далее устройство работает как и по почве пласта. Предложенное устройство повышает точность управления, расширяет функциональные возможности устройст,ва, позволяет решить проблему автоматичеркого вождения по пласту очистных Комбайнов и комплексов. Формула изобретения Устройство для упрайления положением исполнительного органа горной машины в профиле пласта, содержащее установленные на исполнительном органе датчик порода-уголь, синхродатчик, взаимодействующий с исполнительным органом, электронный блок передачи информации, включаклций автономный источник питания и передачик, и установленные на корпусе машины приемный блок, электронный блок обработки ин-. формации,, включающий цифровой счетный и времязадающий блоки, исполнительные блоки, отличающееся тем. Что, с целью повышения точности управления/ оно. снабжено электронным ключом, блоком задержки, задатчиком ширины зоны измерения, расположенными в электронном блоке .обработки информации, датчиком концевых положений исполнительного органа, размещенными на корпусе машины, и реле времени, расположенным в электронном блоке передачи информации и связанным rio входу с бинз рода-т иком, а по выходу - с Цеп:ями питания: датчика порода-уголь и передатчика, а приемный блок соединен с цифровым с 1етным блоком через электронный ключ, входы управления которого подключены соответственно к выходам блока задержки и вре14Язадающего блока, соединенного первым входом управления с выходом блока задержки, первый вход управления которого подключен к выходу приемного блока, причем датчик концевых положений исполнительного органа подключен к задатчику соединенному со вторыми входами управения блока задержки и времязадающего блока. Источники информации, принятые во внимание при экспертизе .1. Патент США 3591235, кл. Е 21 С 35/08, опублик. 06.07.71. 2. W. Thelen und Т. Cast, Ortbestimmung fOr Abbaumasch i пег in Stein-. kohlenJSzen, GlQckauf-Fprschungshefte. 4, 1972, c. 121-127.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1975 |
|
SU899932A1 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Автоматический регулятор положений исполнительного органа горной машины | 1983 |
|
SU1141192A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1983 |
|
SU1132012A2 |
| Система автоматического управления очистным комбайном в профиле пласта | 1985 |
|
SU1270321A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Способ контроля границы уголь-порода | 1980 |
|
SU933992A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |