Изобретение относится к автоматике и вычислительной технике, в частности к системам цифрового программного управления сервомеханизмами, и может найти применение в различных виброиспытательных и моделирующих устройствах.
Известно устройство регулирования вибрацией, содержащее последовательно соединенные измерительное устройство, аналого-цифровой преобразователь, блок обработки спектральной плотности мощности (PSD), схему сравнения, второй вход которой подключен к задатчику PSD, множительную схему, второй вход которой подключен к статистическому генератору, временной преобразователь, условно-вероятную машину, блок обработки информации ,цифроаналоговый преобразователь, исполнительный орган и испытываемый объектГ13.
Известно устройство цифрового уп- равления вибрационными испытаниями, содержащее последовательно соединенные блок ввода-вывода, вычислительную , цифроаналоговый преобразователь, усилитель, исполнительный орган, Измерительный преобразователь.
выход которого подключен к входу вычислительной машины L 1 3Известные устройства не обеспечивают контроль амплитуды подвижной системы и поэтому имеют низкую точность воспроизведения вибраций с заданными параметрами, поскольку реальные испытываемые объекты представляют собой многорезонансные динами10ческие системы, обладающие ярко выраженными частотно-избирательными свойствами.
Наиболее близким техническим решением к изобретению является уст15ройство, содержащее последовательно соединенные цифроаиалоговый преобразователь, усилитель, исполнительный двигатель, датчик положения, первую схему сравнения, генератор
20 входных сигналов, первый выход которого соединен с вторым входом первой схемы сравнения, вторую схему сравнения, выход которой подключен к цифроаналоговому преобразователю,
25 а второй вход ее - к выходу блока дифференцирования, вход которого подключен к выходу датчика положения 2 .
Недостатком устройства является
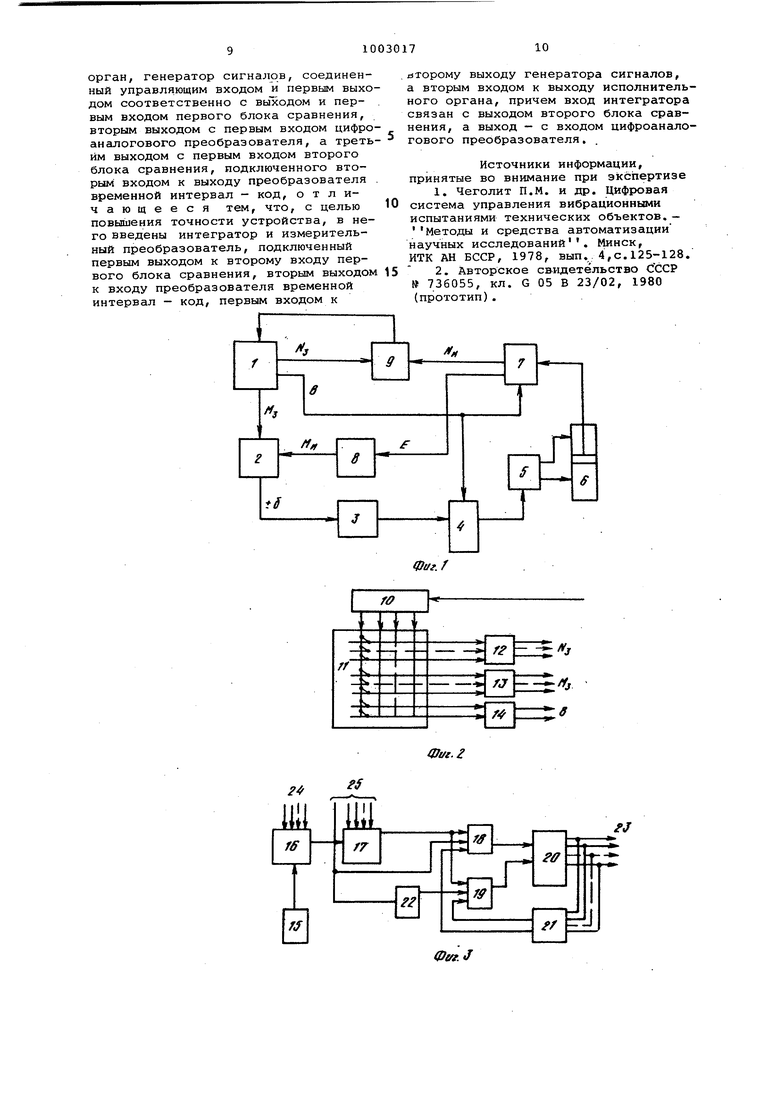
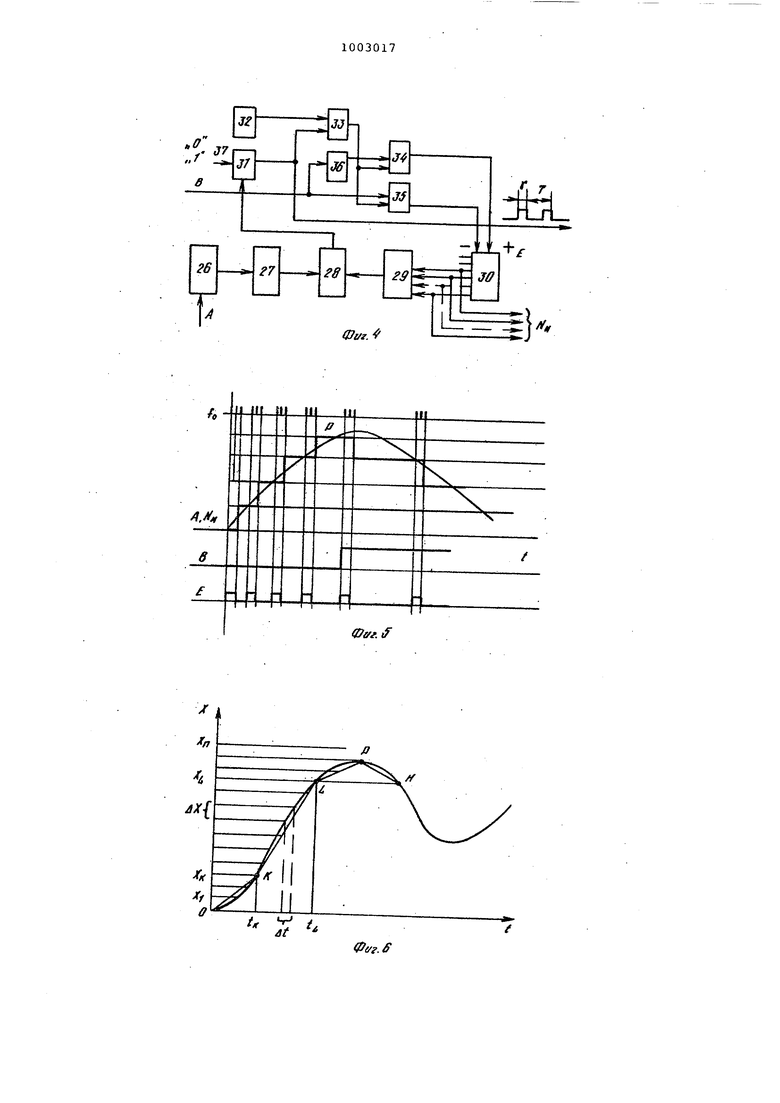
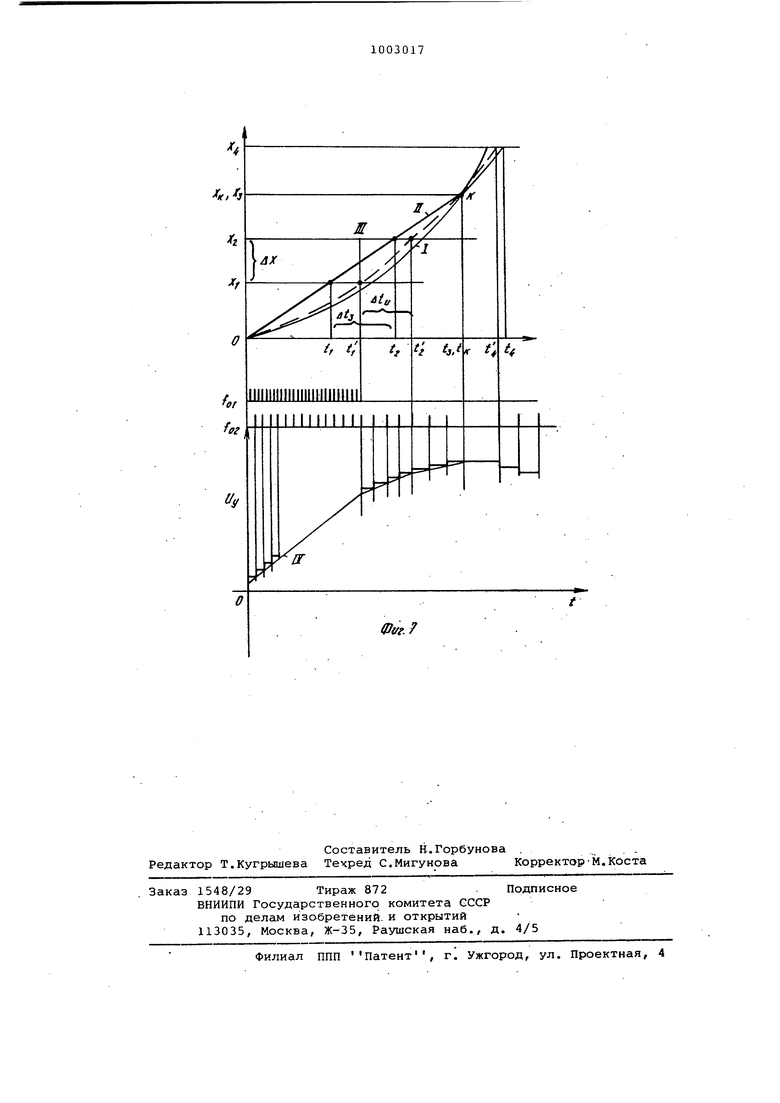
30 то, что в динамических режимах могут быть значительные отклонения по фазе истинного значения вибрации по сравнению с заданной подпрограмме из-за статической ошибки в контуре стабилизации скорости. Поэтому для исключения статической ошибки после второй схемы сравнения необходимо интег рирующее звено, тогда отклонение регулируемой величины от управляющего воздействия стремится к нулю независимо от величины воздействия . Целью изобретения является -повышение точности устройства. Поставленная цель достигается тем что в устройство для управления вибр цией, содержащее последовательно сое диненные цифроаналоговый преобразова тель, усилитель и исполнительный орган, гейератор сигналов, соединенный первыми входом и выходом соответстве но с выходом и первым входом первого блока сравнения, вторым входом с первым входом цифроаналогового преобразователя, а третьим выходом с пе вым входом второго блока сравнения, подключенного вторым выходом к выходу преобразователя временной интервал - код, введены интегратор и изме рительный преобразователь,- подключен ный первым выходом к второму входу первого блока сравнения, вторым выходом к входу преобразователя времен ной интервал - код, первым входом к второму выходу генератора входных си налов, а вторым входом к выходу испо нительного органа, причем вход интег ратора связан с выходом второго блока сравнения, а выход - с входом циф роаналогового преобразователя. На фиг. 1 приведена блок-схема устройства; на фиг. 2 - блок-схема генератора сигналов; на фиг.З - блок схема интегратора; на фиг. 4 - блоксхема одного из вариантов измеритель него преобразователя; на фиг. 5 - временная диаграмма этого варианта измерительного преобразователя; на фиг. 6 - график заданной функции (t); на фиг. 7 - график коррекции скорости и формирования управляющего сигнала. Устройство содержит последователь но соединенные генератор 1 входных сигналов, второй блок 2 сравнения, интегратор 3, цифроаналоговый преобразователь 4 (ЦАП), усилитель 5, исполнительный орган 6, измерительный преобразователь 7, преобразователь 8 временной интервал-код,первый блок 9 сравнения; N,N3, В - эадающие параметры в цифровом коде управления исполнительным органом 6 соответственно положения, скорости и зна ка. N I обратная связи (измеренное истинное значение) по положению и скорости исполнительного блока 6, Е - импульсный выход измерительного преобразователя 7, +сЛ- сигнал рассогласования. Генератор 1 сигналов содержит кольцевой регистр 10,матрицу 11 постоянного перепрограммируемого запоминающего устройства, (ПИЗУ) и регистры памяти положения 12, скорости 13 и знака 14. Интегратор 3 содержит генератор 15 импульсов, предварительный делитель 16, управляемый делитель 17, первый элемент И 18 и второй злемент И 19, реверсивный счетчик 20, схему 21 защиты от опрокидывания реверсивного счетчика 20,инвертор 22,выход 23, установка 24 предварительного делителя 16, управляющий вход 25 (сигнал рассогласования + сС). Измерительный преобразователь 7 содержит,преобразователь 26 неэлектрической величины в аналоговый электрический сигнал, измерительный усилитель 27, компаратор 23, линейный ЦАП 29, реверсивный счетчик 30, триггер 31 запуска, генератор 32 эталонной частоты, первый, второй, третий элементы И 33 - 35, инвертор 36, переключатель 37 запуска, выход цифровой (N), выход импульсный (Е), вход знаковый (В), вход (А). Измерительный преобразователь 7 предназначен для преобразования неэлектрической физической величины (перемещения, усилия, давления, температуры) в электрический нормализованный сигнал и далее преобразования его по уровню в цифровой код, а скорости изменения сигнала во временной интервал, в котором преобразование аналогового электрического сигнала измерительного усилителя 27 в квантованный по уровню цифровой код осуществляется по принципу следящего АЦП. Второй блок 2 сравнения представляет схему параллельного комбинационного сумматора, которая реализует алгоритм Mj- М4 i «/ , Сигнал на выходе (цифрового) ин-г тегратора 3 изменяется по алгоритму t Р()К,, где К - коэффициент, устанавливаемый в предварительном делителе 16; f - переменный коэффициент деления (сигнал рассогласования второго блока 2 сравнения), поступающий на управляемый делитель 17. ЦАП 4 представляет схему линейного ЦАП с управляемым переключателем полярности напряжения. Усилитель 5 и исполнительный орган 6 выполнен по известным техническим решениям в электрогидравлических вибрационных установках. В качестве исполнительного органа может быть и другой сервомеханизм (пневмоцилиндр, электродвигатель и др.). Устройство работает следующим образом. При поступлении питания (на блоксхеме цепи питания не показано) реверсивный (асинхронный) счетчик 30 об нулен и на выходелинейного ЦАП 29 сигнал нулевого уровня. Если на выходе измерительного усилителя 27 так же сигнал нулевого уровня, то на выходе компаратора 28 появляется сигна логического О, который переключа ет триггер 31 запуска,и элементы И и 34 пропускают пачку импульсов с ге нератора 32 эталонной частоты с час тотой fg на реверсивный асинхронный счетчик 30.На выходе линейного ЦАП появляется ступенька напряжения,а н выходе компаратора 28 - логическая 1,которая переключает триггер 31запуска, а первый элемент И 33 пропускает импульсы с генератора 32 эталонной частоты.Таким образом,схе подготовлена к работе. Если же перед пуском устройства на выходе измерительного усилителя 27 имеется установочный сигнал, то нажатием на переключатель 37 запуска пропускают импульсы генератора 32эталонной частоты на реверсивный асинхронный -счетчик 30, пока сигналы на входах компаратора 28 сравняются, и далее после отпускания переключателя 37 запуска, схема устанавливается в рабочее состояние, ка было описано выше. На реверсивный асинхронный счетчик 30 поступает пачка импульсов с целью исключения переключения схемы от случайного одиночного импульса (помехи или сбоя), а также с целью получения опережгиощего реверса реверсивного асинхронного счетчика 30 в экстремальных точках (точка Р на временной диаграмме фиг. 4). Для этого младшие разряды реверсивного асинхронного счетчика 30 остаются свободными. Преобразователь 8 временной инте вал - код предназначен для преобразования временно интервала, обратно пропорционального скорости изменения сигнала (скорости исполнитель ного органа 6) в цифровой код. Первый блок 9 сравнения выдает одиночный импульс при равенстве ко дов N3 N. Работа устройства цифрового упра ления вибрацией основана на том, чт любая заданная функция (t), кото рая должна воспроизводиться исполнительным органом 6, может быть аппроксимирована кусочно-линейными участками с требуемой точностью (фиг. 5). Затем исполнительный орга 6 как быинтерполирует заданную фун ию (t) по программе,- отслеживая аждый заданный кусочно-линейный учасок, для чего в память матрицы 11 ПЗУ генератора 1 (входных) сигналов аносятся координаты и знак наклона инейных участков. При этом координаы узловых точек задаются в цифровом оде величиной уровня (например XL), V| V| угол наклона ot arctd --г линей ц- t ого участка KL величиной временноо интервала дЪ в цифровом коде на искретном участке Дх изменения уровя сигнала, так как угол наклона куочно-линейных участков или скорость V изменения сигнала во времени при авномерном квантовании амплитуды (Ax const)обратно пропорциональны временилЬ изменения сигнала на дискретных участках. oi V °- ut.-&t Величина уровня сигнала определят положение исполнительного органа , а наклон линейного участка - заданую скорость исполнительного органа . Смена программы в регистрах 12 - 4 генератора 1 (входных сигналов происходит автоматически по узловым точкам при совпадении в первом блоке 9 сравнения заданного уровня сигнала Х(Ыз) действительным положением Ы,исполнительного органа 6, измеренным посредством измерительного преобразователя 7, при этом заданный наклон кусочно-линейного участка отрабатывается контуром стабилизации скорости (преобразователь 8, второй блок 2 сравнения, интегратор 3, ЦАП 4), Коррекция скорости осуществляется на каждом дискретном участке пути ДХ путем сравнения измеренного временного интервала uty(M) с заданным сигналом .} во втором блоке 2 сравнения. Ка фиг. 7 показан график коррекции скорости и формирования управляющего сигнала, где Г - заданная функция yax(t},II -аппроксимация заданыой функции; III - истинное значение воспроизведенной функции, 1У - управляющий сигнал, f(j|- частота генератора 15 импульсов, fgg- частота на выходе управляемого делителя 17. Сигнал-рас-. согласования ,. ,t2t2l. уменьшается дискретно, увеличивая автоматически и дискретно постоянную времени цифрового интегратора 3,приближая с каждым дискретом сигнал рассогласования сГ к нулю.Этим и достигается высокая точность как по амплитуде, так и по фазе воспроизведенной функции. Для устойчивой работы различных замкнутых систем в предварительном делителе 16 (цифрового) интегратоpa 3 можно предварительно заносить необходимый коэффициент деления (коэффициент усиления). Рассмотрим работу устройства на примере конкретной реализации устройства. По сигналу Пуск(на блок-схеме цепи питания не показано на выходных шинах N В появляется первое управляющее слово, ко торое задает отработку первой коорд наты, например, точка К на фиг. 5, 6. Поскольку в момент пуска сиг- , нал , то сигнал рассогласования второго блока 2 сравнения .j, т.е имеет максимальное значение. Этот сигнал устанавливает коэффициент деления управляемого делителя 17 (цифрового) интегратора 3,и импульсы частотой 02(фиг. 6) с генератора 15 импульсов через элемент И 18 поступают на реверсивный счетчик 20 который накапливает их с частотой ffjZ выходе ЦАП 4 формируется уп равляющее напряжение UE f dt, Как только исполнительный орган 6 приходит в движение (вперед,вверх возрастает сигнал на выходе измерительного усилителя 27 измерительного преобразователя 7, а на выходе компаратора 28 появляется логический О , который переключает триггер 31 запуска, и на реверсивный асинхронный счетчик 30 проходит пачк импульсов. На выходе линейного ЦАП 29 появляется нормированная ступенька напряжения, а на выходе компарато ра 28 снова появляется логическая , котораявозвращает триг-гер 31 запуска в начальноесостояние, а эл мент И 33 пропускает импульсы. При увеличении сигнала А цикл повторяется, отмеряя напряжение на квантованную величину по уровню. Тогда на выходе Е триггера 31 запуска образуется импульсный сигнал, период Т которого обратно пропорционален скорости изменения сигнала А, т.е. скорости исполнительного органа 6. Выходной код с реверсивного асинхро ного счетчика 30 поступает на первы вход первого блока 9 сравнения для опроса сигнала по уровню, а импульс ный сигнал Е - на вход преобразоват ля 8, в котором измеряется временно интервал и преобразуется в цифровой код, который затем транслируется на второй вход второго блока 2 сравнения. Во втором блоке 2 сравнения опять происходит алгебраическое сложение измеренного сигнала с заданным. Вычисленный сигнал рассогласования сГ устанавливает новый коэффициент дел ния управляемого делителя 17 (цифро вого) интегратора 3. На выходе ЦАП 4 возрастает управляющее напряжение с большей постоянной времени (участок t,;ti, фиг. 6). При отсутствии рассогласования на выходе второго блока 2 сравнения на вход реверсивного счетчика 20 Импульсы не поступают, и управляющее напряжение на выходе ЦАП 4 сохраняет постоянное значение, а при отрицательном сигнале рассогласования с/реверсивный счетчик 20 вычитывает импульсы с частотой fgr, и управляющий сигнал на выходе ЦАП 4 уменьшается. При совпадении истинного положения исполнительного органа 6 с первой заданной координатной узловой точки (точка К на фиг. 5) первый блок 9 сравнения выдает импульс, по которому генератор 1 входных сигналов считывает новое слово, записанное в программе для отработки очередного кусочнолинейного участка заданной функции (KL на фиг. 5), и процесс повторяется. В экстремальных точках (точка Р на фиг. 5) на выходе регистра 14 знака генератора 1 входных сигналов происходит смена знака, по которому изменяется направление счета реверсивного асинхронного счетчика 30 измерительного преобразователя 7 и меняет ся полярность управляющего напряжения на выходе ЦАП 4. Исполнительный орган б по этому сигналу осуществляет реверс. Таким образом, в предлагаемом устройстве осуществляется сравнение на каждом дискретном участке пути ис- полнительного органа 6 с заданными параметрами и соответствующая при этом коррекция. При этом алгоритм управления и коррекции прост, так как выполняются элементарные простейшие операции (исключены операции i умножения, деления). Этим достигается высокое быстродействие, а следовательно, и требуемая точность. Предложенное устройство позволяет проводить ускоренные стендовые виброиспытания различных узлов, конструкций и транспортных средств с высокой точностью воспроизведе ия заданного процесса испытания. Ускорение виброиспытаний в этом Случае достигается за счет того, что, не искажая существенно накопленного повреждения, воспроизводят программно не весь процесс нагружения (вибрации), а лишь часть его, влияющую на развитие усталостного разрушения. Сокращение сроков испытаний при этом может достигнуть 10-100 раз по сравнению с полигонными или стендовыми, приближенными к ним. Формула изобретения Устройство для управления вибрацией, содержащее последовательно соединенные цифроаналоговый преобразователь, усилитель и исполнительный
орган, генератор сигналов, соединенный управляющим входом и первым выходом соответственно с выходом и пер- . вым входом первого блока сравнения, вторым выходом с первым входом цифроаналогового преобразователя, а третьим выходом с первым входом второго блока сравнения, подключенного вторым входом к выходу преобразователя временной интервал - код, отличающееся тем, что, с целью повышения точности устройства, в него введены интегратор и измерительный преобразователь, подключенный первым выходом к второму входу первого блока сравнения, вторым выходом к входу преобразователя временной интервал - код, первым входом к
,иторому выходу генератора сигналов, а вторым входом к выходу исполнительного органа, причем вход интегратора связан с выходом второго блока сравнения, а выход - с входом цифроанало гового преобразователя. .
Источники информации, принятые во внимание при экспертизе
1. Чеголит П.М. и др. цифровая 10 система управления вибрационными испытаниями технических объектов. Методы и средства автоматизации научных исследований. Минск, НТК АН БССР, 1978, вып..4,с.125-128. 15 2. Авторское св идетёльство СССР 736055, кл. G 05 В 23/02, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1425832A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU1020954A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| СЛЕДЯЩИЙ АЦП МНОГОРАЗРЯДНЫХ ПРИРАЩЕНИЙ | 2016 |
|
RU2619887C1 |
| Устройство регулирования температуры | 1982 |
|
SU1061114A1 |
| Следящий аналого-цифровой преобразователь | 1988 |
|
SU1562972A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
2
лг
п
ге
27
г
dBL
3S
JO
23
т
Z7w.
Jf.J
(fff/fJ
