(54) МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| КОНЕЧНАЯ ПЕРЕДАЧА ВЕДУЩЕГО МОСТА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2037699C1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| ДИФФЕРЕНЦИАЛ БЛОКИРУЕМЫЙ | 2008 |
|
RU2407933C2 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2007 |
|
RU2347965C1 |
| ПРИВОД ЗАХВАТНОГО УСТРОЙСТВА | 1996 |
|
RU2110721C1 |
| ВАРИАТОР ПЛАНЕТАРНЫЙ | 2007 |
|
RU2374528C2 |
| Манипулятор для сварочно-наплавочных работ | 1981 |
|
SU969492A1 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1996 |
|
RU2096309C1 |
| ПЛАНЕТАРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2000 |
|
RU2172879C1 |
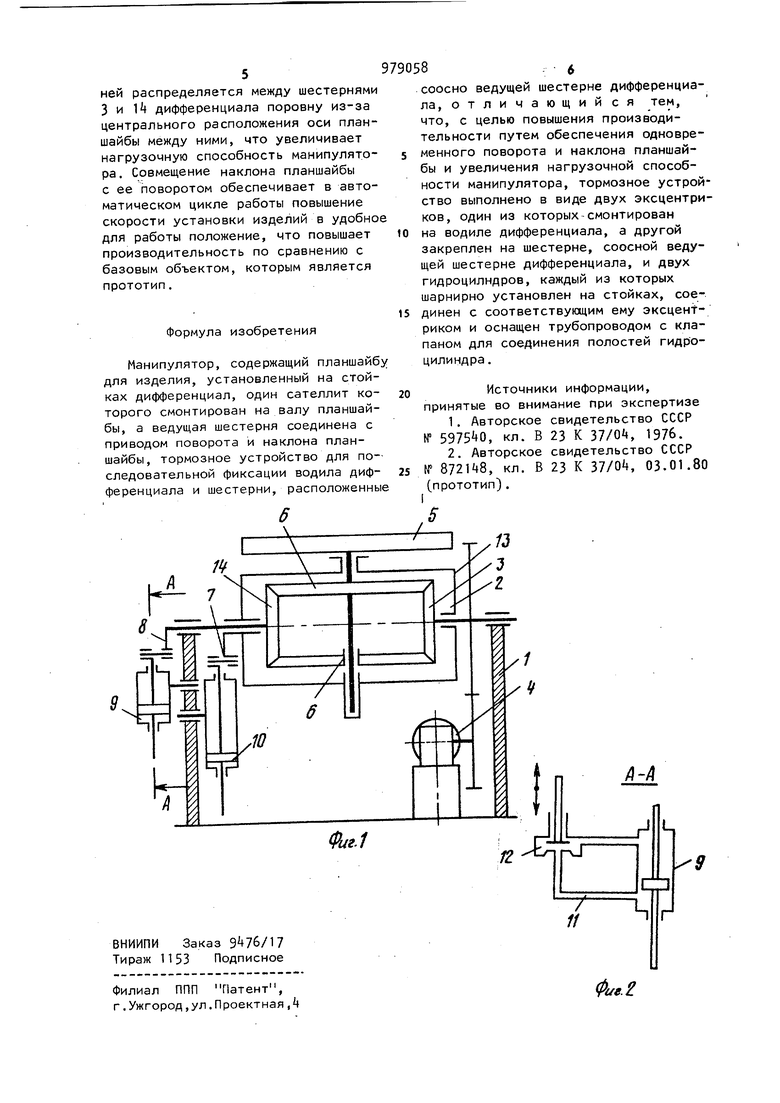
Изобретение относится к области сварки, в частности к оборудованию для механизации и автоматизации вра щения и наклона изделий в процессе сварки. Известен манипулятор, содержащий стойку, полый корпус с установленным внутри него валом планшайбы, при вод поворота и наклона планшайбы и тормозное устройство 1 . Привод планшайбы соединен с ней парой конических шестерен, на зубья которых при наклоне и подъеме из наклонного положения планшайбы действует значительное по величине изгибающее усилие, создаваемое моментом сил от нагруженной планшайбы, возникающим из-за бокового расположения ведущей конической шестерни, что ухудшает условия работы манипулятора. Совмещение двух движений планшай бы: поворота и наклона в таком манипуляторе невозможно. Это в ряде случаев удлинит цикл установки изделия В необходимое для работы положение из-за последовательности выполнения его наклона на требуемый угол и поворота. Указанные недостатки снижают производительность и ухудшают эксплуатационные характеристики манипулятора. Наиболее близким к изобретению по технической сущности и достигаемому результату является манипулятор, содержащий планшайбу для изделия, установленный на стойках дифференциал, один сателлит которого смонтирован на валу планшайбы, а ведущая соединена с приводом поворота и наклона планшайбы, и тормозное устройство для последовательной фиксации водила дифференциала и шестерни, расположенной соосно ведущей шестерне дифференциала С 2 . Однако в известном манипуляторе тормозное устройство выполнено фрикционным и установлено на последней, наиболее нагруженной ступени зубчатой передачи (дифференциала), поэтому нагрузочная способность этого манипулятора ограничена. В известном манипуляторе не обеспечивается одновременный поворот и наклон планшайбы, что снижает его производительность. Кроме того, в известном манипуляторе тормоз водила и шестерни совмещен, поэтому при наклонном положении планшайбы при переключении тормоза для обеспечения вращения планшайбы весь дифференциал окажется расторможенным и планшайба произвольно повер нется под воздействием дисбаланса изделия. Целью изобретения является повышение производительности путем обес печения одновременного поворота и н клона планшайбы и увеличение нагрузочной способности манипулятора. С этой целью в манипуляторе, содержащем планшайбу для изделия, уста новленный на стойках дифференциал, сателлит которого смонтирован на валу планшайбы, а ведущая соединена с приводом поворота и наклона планшайбы, и тормозное устройство для последовательной фиксации водила диф ференциала и шестерни, расположенной соосно ведущей шестерне дифференциала, тормозное устройство выполнено в виде двух эксцентриков, один из которых смонтирован на водиле дифференциала, а другой закреплен на шестерне, соосной ведущей шестерни дифференциала, и двух гидроцилиндров каждый из которых шарнирно установлен на стойке, соединен с соответствующим ему эксцентриком и оснащен трубопроводом с клапаном для соединения полостей гидроцилиндра. На фиг. 1 изображен предлагаемый манипулятор; на фиг. 2 - разрез А-А на фиг. 1 . Манипулятор содержит стойки 1 с установленным на них дифференциалом 2, ведущая шестерня 3 которого соеди нена с приводом Ц поворота и наклона планшайбы 5 один из сателлитов 6 дифференциала смонтирован на план шайбе 5. Манипулятор оснащен тормоз ным устройством, выполненным в виде двух эксцентриков 7 и 8 и двух гидроцилиндров 9 и 10, каждый из которых оснащен трубопроводом 11 для со динения его полостей с встроенным в него клапаном 12. Эксцентрик 7 смонтирован на водиле 13 дифференциала, а эксцентрик 8 на оси шестерни 14 дифференциала. Корпуса гидроцилиндров 3 и 10 шарнирно установлены на стойке 1, а штоки гидроцилиндров соединены с соответствующими им эксцентриками. Манипулятор работает следующим образом. На планшайбе 5 устанавливают и закрепляют изделие. Включают привод , крутящий момент которого передается на ведущую шестерню 3 дифференциала 2. При наклоне планшайбы 5 на необходимый угол клапан 12 гидроцилиндра .9 закрывают. При закрытии клапана 12 гидроцилиндра 9 шестерня 14 будет застопорена. При этом вращение от привода k передается шестерне 3 а сателлиты 6, обкатываясь по застопоренной шестерне 14, обеспечивают наклон планшайбы 5. Но обкатывающиеся сателлиты 6, а с ними и планшайба 5 вращаются при наклоне водила 13 и, так как взаимодействуют с шестрней 14, наклон планшайбы совмещается с ее поворотом. Жидкость в гидроцилиндре 10 перетекает через трубопровод 11 из одной полости в другую, так как эксцентрик 7, закрепленный на водиле 13, при его повороте также поворачивается и перемещает поршень гидроцилиндра. Наибольшее сечение трубопровода 11 оказывает тормозное воздействие на перетекающую жидкость, что обеспечивает плавность поворота водила 13 с планшайбой 5. При подаче команду на вращение планшайбы 5 закрывают клапан 12 гидроцилиндра 10 и открывают та1КОЙ же клапан 12 гидроцилиндра 9 (см. фиг. 2). Жидкость в гидроцилиндре 10 не может перетекать между полостями, что обеспечит стопорение водила 13. Вращательное движение от привода 4 на ведущую шестерню 3 передается на сателлиты 6 и планшайбу 5 по одной цепи, а на шестерню 14 и эксцентрик 8 - по другой цепи. При этом происходит поворот корпуса гидроцилиндра 9 и поступательное перемещение в нем штока, вызывающее перетекание жидкости между его полостями через трубопровод 11. Сопротивление, трубопровода 11 оказывает тормозящее действие на перетекающую жидкость и обеспечивает плавность вращения планшайбы 5. Усилие от нагруженной планшайбы при наклоне последней распределяется между шестерням 3 и Т дифференциала поровну из-за центрального расположения оси план шайбы между ними, что увеличивает нагрузочную способность манипулятора. Совмещение наклона планшайбы с ее поворотом обеспечивает в автоматическом цикле работы повышение скорости установки изделий в удобно для работы положение, что повышает производительность по сравнению с базовым объектом, которым является прототип. Формула изобретения Манипулятор, содержащий планшайб для изделия, установленный на стойках дифференциал, один сателлит которого смонтирован на валу планшайбы, а ведущая шестерня соединена с приводом поворота и наклона планшайбы, тормозное устройство для последовательной фиксации водила дифференциала и шестерни, расположенны
1 58, , соосно ведущей шестерне дифференциала, отличающий ся тем, что, с целью повышения производительности путем обеспечения одновременного поворота и наклона планшайбы и увеличения нагрузочной способности манипулятора, тормозное устройство выполнено в виде двух эксцентриков, один из которых-смонтирован на водиле дифференциала, а другой закреплен на шестерне, соосной ведущей шестерне дифференциала, и двух гидроцилндров, каждый из которых шарнирно установлен на стойках, соединен с соответствующим ему эксцен-гриком и оснащен трубопроводом с клапаном для соединения полостей гидроцилиндра. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № , кл. В 23 К 37/0, 1976. 2.Авторское свидетельство СССР № 872148, кл. В 23 К 37/0t, 03.01.80 (прототип).
