(54) МАНИПУЛЯТОР ДЛЯ СВАРОЧНО-НАПЛАВОЧНЫХ Изобретение относится к механизации и автоматизации сварочных и наплавочных работ, в частности к автоматическим устройствам для наплавки штампов, требующих автоматического наклона стола на разные углы в двух взаимно перпендикулярных плоскостях в процессе наплавки. Известен манипулятор, содержащий стойку, полый корпус с установленным внутри него валом, несушим пльншайбу и привод поворота и наклона планшайбы 1 Указанный манипулятор обеспечивает наклон планшайбы только относительно одной оси, что в ряде случаев, например при автоматической наплавке пространственных штампов, не обеспечивает необходимых положений наплавляемого изделия. Наиболее близким к предлагаемому по технической сушности и достигаемому результату $голяется манипулятор для сва- рочно-наплавочных работ, содержащий смонтированный па основании поворотный корпус с наклонной скобой, ось наклона которой перпендикулярна оси поворота кор
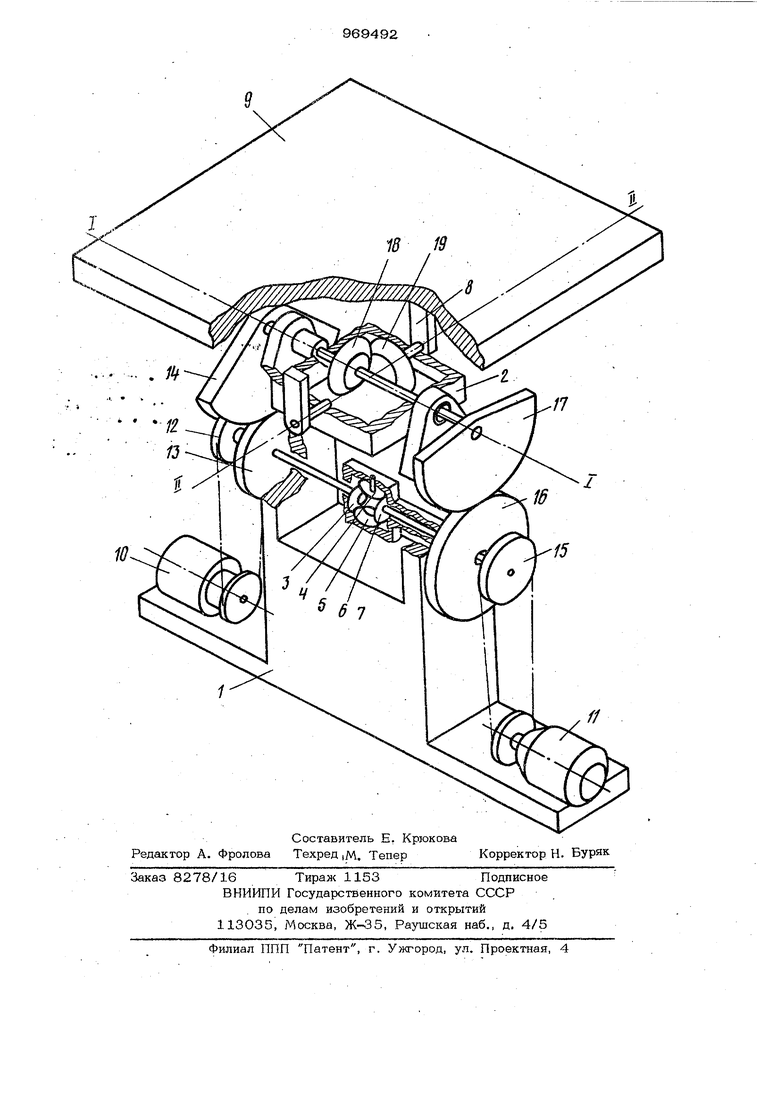
РАБОТ пуса, стол для изделия, закрепленный на скобе, привод поворота корпуса, смонтированный на основании и соединенный с корпусом посредством промежуточной шестерни и зубчатого сектора, закрепленного на корпусе, и привод наклона скобы, соединенный со скобой посредством промежуточной шестерни и зубчатого ceKTOpaf2j Известный манипулятор для сварочнонаплавочных работ имеет повышенные габариты основания из-за необходимости предусматривать свободное пространство для перемещения привода наклона скобы. Кроме того, увеличенные габариты основания вынуждают увеличивать размеры скобы от оси и наклона до стола, чтобы не задеть за элементы основания при наклонах, стола на большой угол, а увеличение расстояния от оси наклона скобы вызывает повышенную нагрузку на привод наклона скобы. Кроме того, известный привод смонтирован на скобе, что создает неудобства в подключении привода и его обслуживании. 3969 Цепь изобретения - улучшение условий эксплуоташти путем снижения нагрузки на приводы и размещения пр1тода в удобном д;1я его обслуживания месте стационарно, а также уменьшение габаритов манипулятора. Поставленная цель достигается тем, что манипулятор для сварочно-наплавочных работ, содержащий смонтированный на основании поворотный корпус с наклонной скобой, ось наклона которой перпендикулярна оси поворота корпуса, стол для изделия закрепленный на скобе, привод поворота корпуса, смонтированный на основании и соединенный с корпусом посредством промегкуточной шестерни и зубчатого сектора, и привод наклона скобы, соединенный со скобой посредством соответствующих ему промелс точной шестерни и зубчатого сек;тора, оснащен дифференциальным механизмом, привод наклона скобы закреплен на основании и снабжен звездочкой, установленной соосно промеясуточной шестерни указанного привода, а на оси поворота зуб чатого сектора привода наклона скобы и на оси наклона скобы смонтированы конические шестерни, взаимодейсхъующие одна -с другой, при этом одна из шестерен дифференциального механизма закреплена на промежуточной шестерне привода поворота корпуса, противолежащая шестерня этого механизма vзaкpeплeнa на звездочке привода наклона скобы, а водило смонтировано на промежуточной шестерне привода наклона скобы, причем передаточное отношение числа оборотов промежуточной шестерни и. зубчатого сектора привода поворота кор- пуса в два раза больше передаточного отношения числа оборотов промежуточной шестерни и зубчатого сектора привода наклона скобы. На чертеже изображен манипулятор. Манипулятор для сварочно-наплавочных работ содержит основание 1, на котором с возмойшостью поворота установлен корпус 2, а также дифференциальный механизм состояший из шестерен 3 - 6 и водила 7. На корпусе 2 с .возможностью наклона установлена скоба 8 с закрепленным на ней столом 9 для изделия. На основании смонтированы привод 1О поворота корпуса 2 и привод 11,-наклона скобы 8. Привод 1О соединен с корпусом 2 посредство звездочки 12, промежуточной шестерни 13 и зубчатого сектора 14, закрепЛенного на корпусе 2. Привод 11 соединен со скобой посредтвом звездочки 15, промежуточной шестерни 16, зубчатого сектора 17 к двух конических шестерен 18 и2419, .причем шестерня 18 смонтирована на оси поворота зубчатого сектора 17, а шестерня 19 - на оси наклона скобы 8. Шестерня 3 дифференциального механизма закреплена- на промежуточной шестерне 13, шестерня 4 - на звездочке, а водило 7 - на промежуточной шестерне 16. Передаточное отношение числа оборотов промежуточной шестерни 13 и сектора 14 в два раза больше передаточного отношения числа оборотов шестерни 16 и сектЬ|эа 17. Манипулятор работает следующим образом . Для наклЬна стола 9 с изделием относительно оси И-11 наклоняют скобу 8, Наклон скобы 8 осуществляется включением привода 11, от которого вращение передается через цепь и звездочку 15 на шестерни 6 4 и 5 дифференциального механизма, водило 7, шестерню 16, сектор 17, конические шестерни 18 и 19 наскобу 8. Для наклона стола 9 относительно оси | j , включают привод 1О, от которого вращение передается на звездочку 12 и одновременно на шестерню 13 и коническую шестерню 3 дифференциального механизма. От шестерни 13 через сектор 14 вращение передается на корпус 2, который вместе со столом наклоняется относительно оси - . А от шестерни 3 вращение передается через шестерни 4 и 5 на водило 7 и шестерню 16. При заторможенной шестерне 6 дифференциальный механизм работает как планетарный редуктор с двухкратным замедлением. Шестерня 16 передает вращение через сектор 17 на коническую шестерню 18, которая поворачивается синхронно с поворотом корпуса 2 вследствие соответствующего подбора передаточных отнощений между шестерней 13 и сектором -14 и шестерней 16 и сектором 17. Введение дифференциального механизма -между . шестернями 13 и 15 кинематически развязывает движение по наклону стола относительно оси | - I и оси Н-И за счет дополнительного поворота водила 7, шестерен 16, сектора 17 и шестерни .18 ц сторону, противоположную движению обкатки шестерни 19 по шестерне 18,. т. е. шестерня 18 поворачивается на величину, необходимую для компенсации увода стола относительно оси 11-11 при работающем приводе 10 и отключенном приводе 11. Таким образом, при работе привода 1О и остановленном;1риводе 11 стол 9 наклоняется только относительно оси 1-| . Перемещение стола относительно обеих .осей осуществляется с одинаковой скоростью. Двухкратное замедление скорости вращения при передаче движения от щестерен 6 или 3 к водилу 7 при эаторможенной соответственно щестерне 3 или 6 является следствием включения дифференциала по данной схеме. Пр|И неработающем приводе 10, т. е. заторможенной щестерне 3, движение на кинематическую цепь, обеспечивающую на клон относительно оси 1-| , не передается, а дифференциал выполняет роль пони жаклцего редуктора. Для обеспечения одинаковых скоростей наклона стола относительно обеих осей, а также синхронной работы двух кинематических цепей при: наклоне относительно оси I- I необходимо, чтобы передаточное отнощение между щестерней 13 и секто- ром 14 было в два раза больще, чем меж ду щестерней 16 и сектором 17. В связис с тем, что корпус с коническими щестернями может выполняться в минимальных габаритах, основание мо- жет быть уменьщеио в размерах и соответственно уменьщен вылет стола от осей поворота, что снижает нагрузку на приводы наклона стола. Уменьшенные габариты основания и скобы позволяют более удобно смонтировать на столе механизмы для автом тиче кой иаплавки или сварки. Расположение приводов на основании стационарно улучщает условия их обслужи вания и эксплуатации. Формула изобретения Манипулятор для сварочно-наплавочны 1работ, содержащий смонтированный на основании поворотный корпус с наклонной скобой, ось наклона которой перпендикулярна к оси поворота корпуса, стол для изделия, закрепленный на скобе, привод поворота корпуса, смонтированный на основании и соединенный с корпусом посредством промежуточной щестерни и зубчатого сектора, и привод наклона скобы, соединенный со скобой посредством соответствующих ему промежуточной щестегьни и зубчатого сектора, отличающийся тем, что, с целью улучщения условий эксплуатации путем снижения нагрузки на приводы, манипулятор оснащен дифференциальным механизмом, привод наклона скобы закреплен на основании и снабжен звездочкой, установленной со- осно промежуточной шестерни указанного привода, а на оси поворота зубчатого сектора привода наклона скобы и на оси наклона скобы смонтированы конические щестерни, взаимодействующие одна с другой, при этом одна из шестерен дифференциального механизма закреплена на-промежуточной щестерне привода поворота корпуса, противолежащая шестерня этого механизма закреплена на звездочке привода наклона скобы, а водило смонтировано на промежуточной щестерне привода наклона скобы, причем передаточное оч нош.ение числа оборотов промежуточной шестерни и зубчатого сектора привода поворота корпуса в два раза больше передаточного отношения числа оборотов промежуточной щестерни и зубчатого сектора привода наклона скобы. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетель ство СССР № 597540, кл. В 23 К 37/О4. 1976. 2.Авторюкое свидетельство СССР № 195571, кл. В 23 К 37/О4, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ СВАРОЧНО-НАПЛАВОЧНЫХ РАБОТ | 1967 |
|
SU195571A1 |
| Сварочный манипулятор | 1981 |
|
SU996156A1 |
| Сварочный манипулятор | 1960 |
|
SU135555A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1982 |
|
SU1055932A1 |
| УСТАНОВКА ДЛЯ УПРОЧНЕНИЯ ИНДУКЦИОННОЙ НАПЛАВКОЙ | 1999 |
|
RU2154562C1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2009 |
|
RU2410589C1 |
| НАПЛАВОЧНЫЙ СТАНОК | 2003 |
|
RU2246384C2 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |