Изобретение относится к электротехнике, в частности к 6ecKOHTaKTHbif электроприводам постоянного тока.
Известен бесконтактный электропривод постоянного тока, содержащий трехфазный электродвигатель, фазные обмотки которого подключены к двухполупериодному транзисторному коммутатору, и три датчика положение ротора, установленные через 120° в направлении его вращения 1 .
Недостатки указанного электропривода - большое количество транзисторов в коммутаторе и сложность схемы управления.
Наиболее близким по технической сущности к предлагаемому является бесконтактный электропривод постоянного тока, содержащий трехфазный электродвигатель, с реактивным ротором и статорными обмотками на транзисторах и три датчика положения ротора, установленные через 120° в направлении его вращения 2.
К недостаткам известного электропривода следует отнести его низкий КПД.
Цель изобретения - повышение КПД электропривода.
Поставленная цель достигается тем, что в бесконтактном электроприводе, содержащем трехфазный электродвигас тель с реактивным ротором и статор. ными обмотками, соединенными в звезду и подключенными к однополупериодному транзисторному коммутатору, и три датчика положения ротора, сдвинутых
4Q между собой по окружности статора на 120, одна из статорных обмоток включена встречно по отнсяиению к двум другим и в устройство введены дополнительно еще три датчика положения ротора, каждый из которых сдвинут на
5 60 относительно соответствующего основного датчика положения, и три сумматора, входы каждого сумматора соединены с выходами соответствующих диаметрально расположенных основного
и дополнительного датчиков положения, а выход каждого сумматора связан с соответствующим транзистором коммутатора.
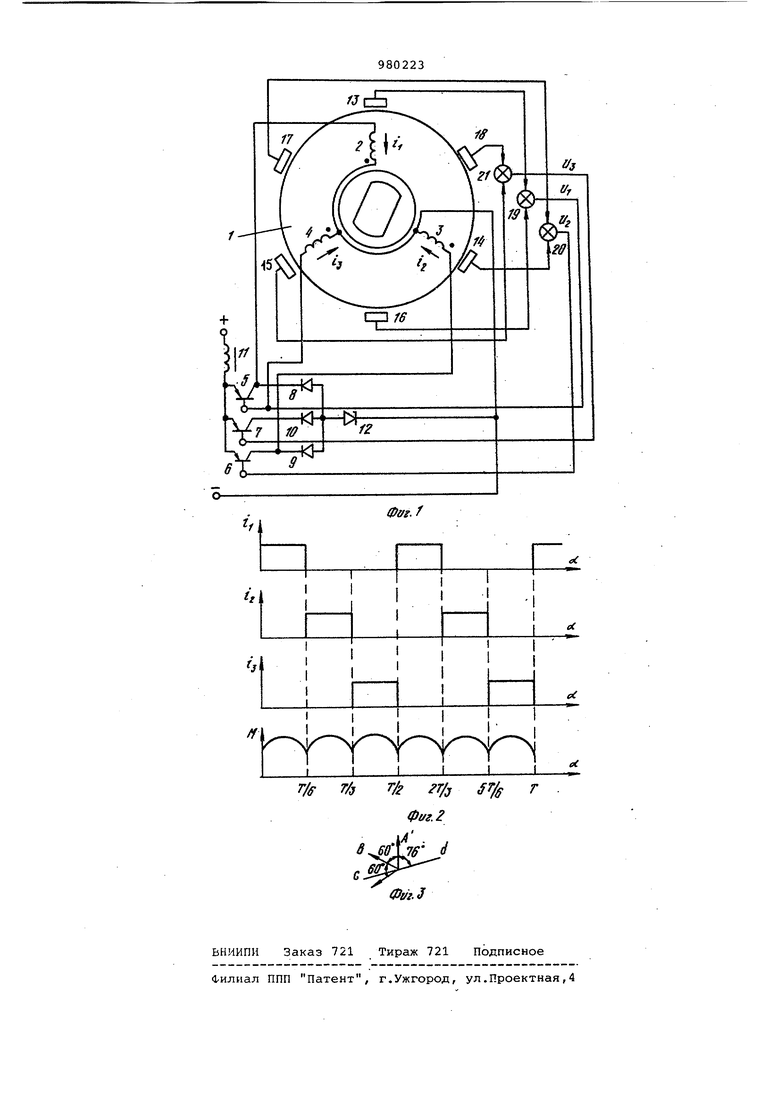
25 На фиг. 1 представлена схема бесконтактного электропривода постоянного TOKat на фиг. 2 - графики токов в статорных обмотках электродвигателя и зависимость электромагнитного
30 момента от угла поворота ротора; на фиг, 3 - распределение н.с. в зависимости от угла поворота ротора. Бесконтактный электропривод постоянного тока содержит трехфазный электродвигатель 1 с реактивным ротором {фиг. 1). Статорные обмотки 2-4 соединены в звезду, причем обмотка 4 включена встречно по отношению к статорным обмоткам 2 и 3. Статорные обмотки электродвигателя подключены к выходу коммутатора, выполненному на транзисторах 5-7, диодах 8 - 1о, соединенных по однополупериодной мостовой схеме. Один входйой зажим коммутатора через дрос сель 11 подключен к плюсовому зажиму источника питания, а другой входной зажим через стабилитрон 12 соединен -с минусовым зажимом источника питдния и нулевым выводом статорных обмоток электродвигателя. Электропривод содержит три основных датчика 13 - 15 положения ротора сдвинутые между собой по окружности статора на 120°, и три дополнительны датчика 16 - 18 положения ротора, каждый из которых сдвинут относитель но соответствующего ему основного датчика положения на 60°. Выходы диаметрально расположенных основного датчика 13 положения ротора и дополнительного датчика 16 положения ротора подключены к соответствующим входам сумматора 19. Выходы диаметрально расположенных основного датчика 14 положения ротора и дополнительного датчика 17 положения рото ра подключены к соответствующим входам сумматора 20. Выходы диаметрально расположенных основного датчика 15 положения ротора и дополнительного датчика 18 положения ротора подключены к соответствующим входам сумматора 21. Выходы сумматоров 19 - 21 подключены к транзисторам 5 - 7 соответственно. Бесконтактный электропривод работает следующим образом. При угле поворота ротора ot равном О - г- открыт транзистор 5, транзисторы б и 7 заперты. .Ток i (фиг. 1 и 2) протекает по обмотке 1. Вектор н.с. направлен по оси А (фиг. 3). В момент, когда угол поворота ротора cL равен нулю, продольная ось ё{фиг.З ротора отстает от вектора н.с. на 76 При-; вращении ротора электромагнитный момент изменяется пропорционально синусу двойного угла поворота, достигая максимального значения при угле поворота ротора, составлен ном вектором н.с. и продольной осью ротора и равном 45°. После поворота -ротора на угол Т d- 7- происходит отпирание травзистора б и запирание транзистора 5, Ток начинает протекать по обмотке 2. Вектор н.с. поворачивается на 60. При угле oi. равном- 1- вектор н.с. направлен по оси В (фиг. 3). График изменения момента изображен на фиг. 2. , После поворота ротора на угол сС Y отпирается транзистор 7, а транзистор 6 запирается. При угле d равном -j вектор н.с. направлен по оси С (фиг. 3). После поворота ротора на угол «i -у отпирается транзистор 5 и запирается транзистор 7. Вектор н.с. снова направлен по оси А. При угле (L равном угол между продольной осью d ротора и вектором н.с. тот же, что и при угле oL, равном нулю. Так как реактивный ротор симметричен относительно его поперечной оси, то электромагнитный момент направлен в ту же сторону, что и ранее. При угле oL равном - - - ток протекает по обмотке 1, при угле оС равном - - - по обмотке 2 и т.д. Из графика момента (фиг. 2) следует, что величина среднего момента в данном электроприводе больше, чем в известном электроприводе, а следовательно, и КПД электропривода выше. Формула изобретения Бесконтактный электропривод постоянного тока, содержащий трехфазный электродвигатель с реактивным ротором и статорными обмотками, соединенными в звезду и подключенныг-ли к однополупериодному коммутатору, выполненному на транзисторах, три основных датчика положения, сдвинутых между собой по окружности статора на 120°, отличающийся тем, что, с целью повышения КПД, одна из статорных обмоток включена встречно по отношению к двум другим и в устройство введены три дополнительных датчика положения, каждый из которых сдвинут относительно соответствующего ему основного на 60°, и три сумматора, входы каждого сумматора подклю-. чены к выходам соответствующих диаметрально расположенных. основному и дополнительному датчикам положения, а выход каждого сумматора связан с соответствующим транзистором коммутатора. Источники информации, принятые во внимание при экспертизе 1.Овчинников И.Е., Лебедев Н.И. Бесконтактные двигатели постоянного тока автоматических устройств. М.-Л., Наука, 1966. 2.Авторское свидетельство СССР 420057, кл. Н 02 К 29/02, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2288535C1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ПОВЫШЕННЫМИ ХАРАКТЕРИСТИКАМИ НАДЕЖНОСТИ | 2012 |
|
RU2488216C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Вентильный электродвигатель | 1983 |
|
SU1105986A1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2408973C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2007 |
|
RU2337466C1 |
| УСТРОЙСТВО БЕСКОНДЕНСАТОРНОГО ЗАПУСКА ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ ОДНОФАЗНОЙ СЕТИ | 2009 |
|
RU2402863C1 |
JZ
