Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известны многофазные вентильно-индукторные двигатели с прямыми полюсами ротора и статора и сосредоточенными обмотками, расположенными на полюсах статора [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003, с.62]. В таких двигателях Z2=Z1±2, где Z2 - число полюсов ротора; Z1 - число полюсов статора, поэтому ротор вентильно-индукторного двигателя вращается с частотой меньшей, чем частота первой гармоники токов фаз  , где Ω - частота вращения ротора; ω - частота первой гармоники токов фаз.
, где Ω - частота вращения ротора; ω - частота первой гармоники токов фаз.
Основными недостатками этих двигателей являются повышенный уровень шумов, вибраций и высокие пульсации момента [Шабаев В.А. Анализ источников шума вентильно-индукторного двигателя // Электротехника. 2005, №5, с.62].
Вторым недостатком вентильно-индукторных двигателей является то, что при коммутации фаз токи фаз протекают только в одном направлении, поэтому для коммутации каждой фазы необходимо применение полумостовых схем [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003, с.10, 15, 17]. Применение полумостовых схем для коммутации фаз увеличивает суммарную установочную мощность и цену полупроводниковых приборов инвертора [Питание машин с регулируемой реактивностью. G. Glaize. H. Foch. L'alimentation des machines a'reluctance variable. Machines a'Reluctance Variable, 30 septembre 1985, Франция.]. Токи фаз вентильно-индукторного двигателя, протекающие только в одном направлении, являются в общем случае несинусоидальными и при разложении в ряд Фурье имеют в своем составе нулевую, первую и высшие гармоники. Нулевая гармоника токов фаз по своей сути является током возбуждения.
Известны синхронно-реактивные двигатели с акисиальным возбуждением (A.M.Григорович, Б.А.Метелкин, Я.Б.Тубис и В.А.Шабаев. Авторское свидетельство СССР №1737644 А1, Электрическая машина, кл. H02K 19/20, 1980).
Основными недостатками этого технического решения является высокая мощность, потребляемая обмотками возбуждения, обуславливаемая тем, что магнитные потоки возбуждения замыкаются через два зазора и через магнитопровод статора и ротора в поперечном направлении (против шихтовки), то есть магнитное сопротивление потокам возбуждения достаточно велико. Это вызывает необходимость увеличения напряженности магнитного поля за счет увеличения числа витков и тока обмоток возбуждения, что в свою очередь приводит к дополнительному нагреву и увеличению массы и размеров двигателя. Кроме того, эта конструкция сложна и нетехнологична.
Наиболее близким к предлагаемому изобретению является низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов, содержащий статор с числом полюсов, кратным шести, и ротор с числом полюсов, меньшим числа полюсов статора на величину этой кратности (например,  и так далее, где Z1 - число полюсов статора; Z2 - число полюсов ротора), фазные обмотки которого соединены в треугольник, питающийся от трехфазного мостового инвертора через включенные в каждую обмотку по одному диоду и управляемый трехфазным прямоугольным линейным напряжением различной полярности, причем периоды прямоугольных линейных напряжений составляют 120 электрических градусов, периоды, когда напряжения равны нулю, составляют 60 электрических градусов и при трехфазным прямоугольном линейном напряжении различной полярности сдвинуты относительно друг друга на 120 электрических градусов [Плах Г.К., Лозитский О.Е., Луговец В.А., Протасов Д.А., Мустафаев P.P. Низкооборотный высокомоментный вентильно-индукторный реактивный двигатель для автоматизированных электроприводов. / Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу. АЭП-2007, Санкт-Петербург, 18-21 сентября 2007].
и так далее, где Z1 - число полюсов статора; Z2 - число полюсов ротора), фазные обмотки которого соединены в треугольник, питающийся от трехфазного мостового инвертора через включенные в каждую обмотку по одному диоду и управляемый трехфазным прямоугольным линейным напряжением различной полярности, причем периоды прямоугольных линейных напряжений составляют 120 электрических градусов, периоды, когда напряжения равны нулю, составляют 60 электрических градусов и при трехфазным прямоугольном линейном напряжении различной полярности сдвинуты относительно друг друга на 120 электрических градусов [Плах Г.К., Лозитский О.Е., Луговец В.А., Протасов Д.А., Мустафаев P.P. Низкооборотный высокомоментный вентильно-индукторный реактивный двигатель для автоматизированных электроприводов. / Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу. АЭП-2007, Санкт-Петербург, 18-21 сентября 2007].
Недостатками этого технического решения являются большая неравномерность момента (в описании прототипа пульсации момента составляют 16%) и наличие в схеме управления замкнутого контура, состоящего из двух последовательно включенных диодов и двух обмоток фаз полюсов, сдвинутых на 180 электрических градусов, вследствие чего электродвижущая сила этих обмоток при уменьшении тока уравновешивается омическим сопротивлением обмоток и падением напряжения на диодах в прямом направлении, что обуславливает низкую скорость уменьшения тока при коммутации фаз и наличие наряду с двигательными тормозных моментов, которые уменьшают вращающий момент двигателя, увеличивают энергетические потери, что особенно сильно сказывается при высоких частотах вращения. Кроме того, форма тока каждой фазы близка к форме тока, называемой «детектированной синусоидой», ток такой формы при разложении в ряд Фурье наряду с нулевой гармоникой содержит много высших гармоник, что вызывает шумы и вибрации.
Целями предлагаемого изобретения является уменьшение уровня шумов и вибраций и пульсаций момента.
Поставленные цели достигаются тем, что в известных шестифазных синхронно-реактивных двигателях, содержащих явнополюсные симметричные статор и ротор с Z2=(Z1±2)p, где p - число пар полюсов статора, p=2,4,8……, каждый полюс статора оснащен двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, причем фазные обмотки фазы А соединены последовательно с фазными обмотками фазы D, фазные обмотки фазы В соединены последовательно с фазными обмотками фазы Е, фазные обмотки фазы С соединены последовательно с фазными обмотками фазы F, эти попарно соединенные обмотки соединены в «звезду» и с выходами трехфазного мостового инвертора, а обмотки возбуждения каждого из полюсов соединены последовательно и подключены к выходам однофазного полумостового инвертора, при этом фазные обмотки питаются токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, а обмотки возбуждения питаются постоянным током, причем величина постоянного тока равна амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи релейно-токового способа управления, и симметричный явнополюсный ротор со скошенными полюсами, причем угловая ширина полюса ротора для вентильно-индукторного двигателя с Z1=12 и Z2=10 равна угловой ширине межполюсного расстояния ротора и равна 18°, а угол скоса ротора по оси равен 6°, угловая ширина полюса статора равна 12°, угловая ширина межполюсного расстояния статора равна 18°.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
- каждый полюс статора оснащен двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, причем фазные обмотки фазы А соединены последовательно с фазными обмотками фазы D, фазные обмотки фазы В соединены последовательно с фазными обмотками фазы Е, фазные обмотки фазы С соединены последовательно с фазными обмотками фазы F;
- эти попарно соединенные обмотки соединены в «звезду» и с выходами трехфазного мостового инвертора, а обмотки возбуждения каждого из полюсов соединены последовательно и подключены к выходам однофазного мостового инвертора, при этом фазные обмотки питаются токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, а обмотки возбуждения питаются постоянным током;
- величина постоянного тока равна амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи токового способа управления;
- двигатель содержит явнополюсный ротор со скошенными полюсами, причем угловая ширина полюса ротора для вентильно-индукторного двигателя с Z1=12 и Z2=10 равна угловой ширине межполюсного расстояния ротора и равна 18°, а угол скоса по оси ротора равен 6°, угловая ширина полюса статора равна 12°, угловая ширина межполюсного расстояния статора равна 18°.
Следовательно, заявленное техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения уменьшаются шумы и вибрации вентильно-индукторного двигателя и уменьшаются пульсации момента за счет отсутствия высших гармоник токов основных обмоток и обмоток возбуждения и за счет уменьшения числа и амплитуды высших гармоник производных индуктивностей фаз по углу поворота ротора.
Следовательно, заявленное техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, электропривода и электродвигателей.
Шестифазных вентильно-индукторных двигателей с 12 полюсами статора и 10 полюсами ротора, содержащих явнополюсный ротор со скошенными полюсами, с угловой шириной полюса ротора, равной угловой ширине межполюсного расстояния ротора и равной 18°, с углом скоса полюса ротора по оси, равным 6°, угловой шириной полюса статора, равной 12°, угловой шириной межполюсного расстояния статора, равной 18°, с каждым полюсом статора, оснащенным двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, с фазными обмотками фазы А, соединенными последовательно с фазными обмотками фазы D, фазными обмотками фазы В, соединенными последовательно с фазными обмотками фазы Е, фазными обмотками фазы С, соединенными последовательно с фазными обмотками фазы F, с тремя концами этих попарно последовательно соединенных обмоток, соединенными в «звезду», и с остальными тремя концами, соединенными с выходами трехфазного мостового инвертора, и питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, с обмотками возбуждения каждого из полюсов, соединенными последовательно, подключенными к выходам однофазного полумостового инвертора, питающимися постоянным током, с величиной, равной амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи релейно-токового способа управления, в известных технических решениях не обнаружено.
Таким образом, указанные признаки обеспечивают заявленному техническому решению соответствие требованию «существенные отличия»
Сущность предполагаемого изобретения поясняется чертежами. На фиг.1 приведен шестифазный вентильно-индукторный двигатель с минимальными шумами, вибрациями и пульсациями момента, с 12 полюсами статора и 10 полюсами ротора, содержащего явнополюсный ротор со скошенными полюсами и обмотками возбуждения на полюсах статора. На фиг.1 обозначено: 1 - статор; 2 - обмотка возбуждения; 3 - фазная обмотка; 4 - ротор; 5 - вал; A-F - полюса статора, оснащенные обмотками соответствующих фаз; 1-12 - номера полюсов статора; 1-10 - номера полюсов ротора.
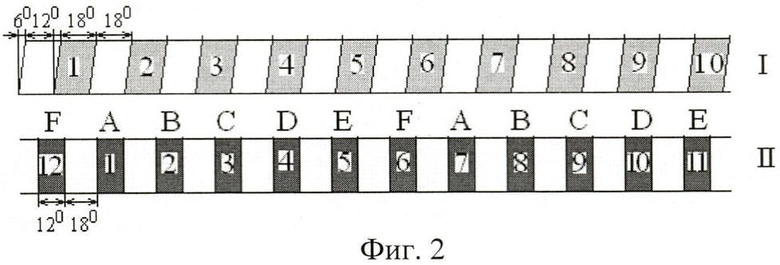
На фиг.2 приведены развертки поверхностей полюсов ротора и статора шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента, с 10 полюсами ротора и 12 полюсами статора, содержащего явнополюсный ротор со скошенными полюсами в положении ротора относительно статора, соответствующем фиг.1. На фиг.2 обозначено: I - развертки поверхностей полюсов ротора; II - развертки поверхностей полюсов статора; A-F - полюса статора, оснащенные обмотками соответствующих фаз; 1-12 - номера полюсов статора; 1-10 - номера полюсов ротора.
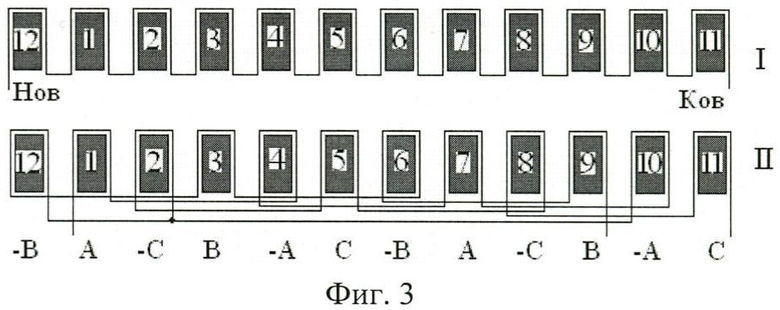
На фиг.3 приведены схемы фазных обмоток и обмоток возбуждения шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента, с 10 полюсами ротора и 12 полюсами статора. На фиг.3 обозначено: I - схема обмоток возбуждения; II - схема фазных обмоток; 1-12 - номера полюсов статора в соответствии с фиг.1; Нов - начало обмотки возбуждения; Ков - конец обмотки возбуждения; А, В, С - обмотки полюсов статора, в которых протекает трехфазный переменный ток; -А, -В, -С - обмотки полюсов статора, в которых протекает трехфазный переменный ток, сдвинутый относительно обмоток А, В, С на 180 электрических градусов за счет противоположного включения начал и концов этих обмоток.
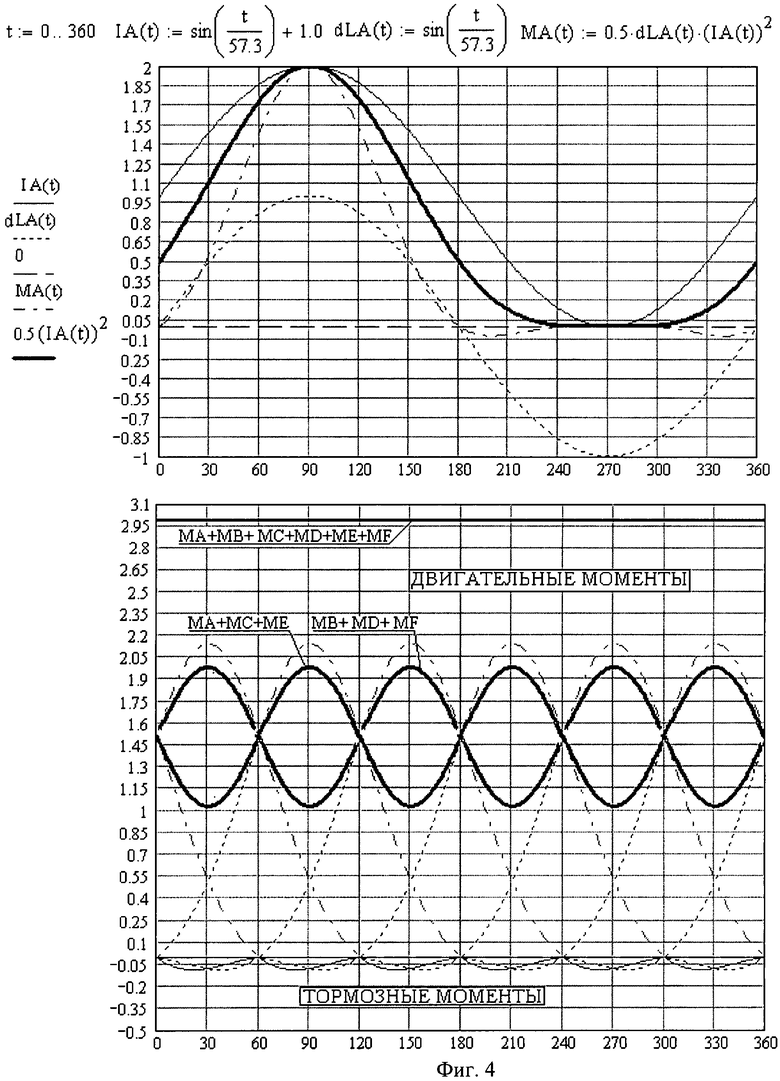
На фиг.4 приведены диаграммы работы шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента с 12 полюсами статора и 10 полюсами ротора, содержащего явнополюсный ротор со скошенными полюсами, рассчитанные в относительных единицах с помощью программы MathCad. На фиг.4 обозначено: t:=0…360 - угол поворота ротора относительно статора в электрических градусах;  - производная индуктивности фазы А по углу поворота ротора, имеющая синусоидальную форму за счет конфигурации полюсов ротора и статора, показанных на фиг.1 и 2;
- производная индуктивности фазы А по углу поворота ротора, имеющая синусоидальную форму за счет конфигурации полюсов ротора и статора, показанных на фиг.1 и 2;  - суммарный ток фазной обмотки и обмотки возбуждения полюсов фазы A; 0,5(IA(t))2 - половина квадрата суммы токов фазной обмотки и обмотки возбуждения фазы A; MA(t):=dLA(t)0,5(IA(t))2 - крутящий момент на валу двигателя, создаваемый фазой А; МА+МС+МЕ - суммарный вращающий момент на валу двигателя, создаваемый фазами А, С, Е; MB+MD+MF - суммарный вращающий момент на валу двигателя, создаваемый фазами В, D, F; MA+MC+ME+MB+MD+MF - суммарный вращающий момент на валу двигателя, создаваемый всеми шестью фазами.
- суммарный ток фазной обмотки и обмотки возбуждения полюсов фазы A; 0,5(IA(t))2 - половина квадрата суммы токов фазной обмотки и обмотки возбуждения фазы A; MA(t):=dLA(t)0,5(IA(t))2 - крутящий момент на валу двигателя, создаваемый фазой А; МА+МС+МЕ - суммарный вращающий момент на валу двигателя, создаваемый фазами А, С, Е; MB+MD+MF - суммарный вращающий момент на валу двигателя, создаваемый фазами В, D, F; MA+MC+ME+MB+MD+MF - суммарный вращающий момент на валу двигателя, создаваемый всеми шестью фазами.
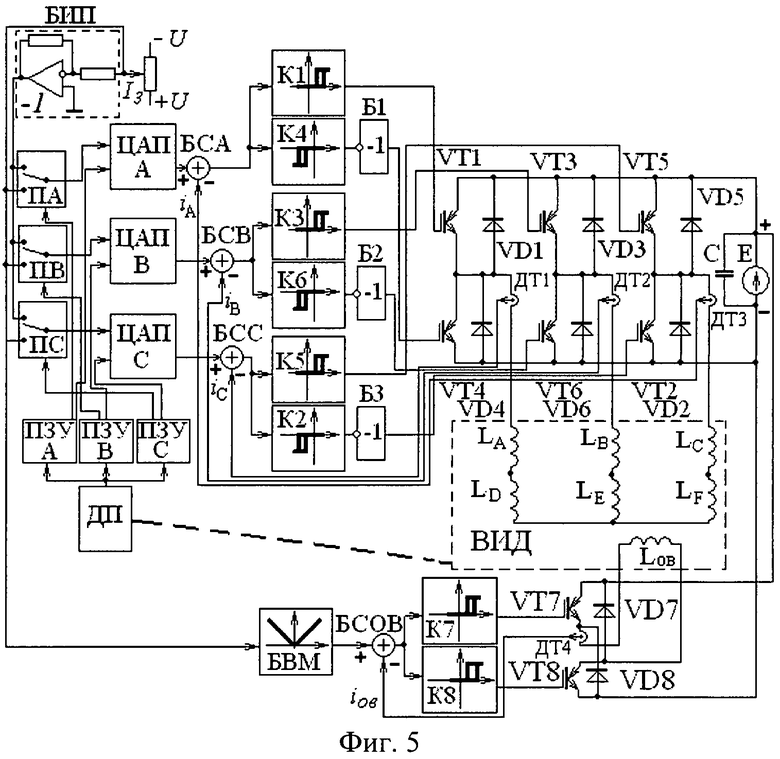
На фиг.5 приведена структурная схема регулятора момента шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента. На фиг.5 обозначено: R - резистор, задающий амплитуду и направление вращения вектора заданного тока; +U, -U - напряжения питания резистора, задающего амплитуду и направление вращения вектора заданного тока; Iз - заданный вектор тока; БИП - блок изменения полярности; -1 - коэффициент передачи блока изменения полярности; ПА, ПВ, ПС - переключатели полярностей тока задания соответствующих фаз; ЦАПА, ЦАПВ, ЦАПС - цифроаналоговые преобразователи соответствующих фаз; ПЗУА, ПЗУВ, ПЗУС - постоянные запоминающие устройства соответствующих фаз; ДП - датчик положения ротора вентильно-индукторного двигателя; БСА, БСВ, БСС - блоки сравнения текущих значений заданных токов и токов обмоток соответствующих фаз; iA, iB, iC - текущие значения токов обмоток соответствующих фаз; K1-K8 - компараторы с гистерезисом; Б1, Б2, Б3 - блоки с коэффициентом передачи, равным -1, изменяющие полярность выходного напряжения компараторов K2, K4, K6; VT1-VT8 - силовые транзисторы; VD1- VD8 - силовые диоды; ДТ1-ДТ4 - датчики тока; Е -источник постоянного напряжения; С - конденсатор источника постоянного напряжения; LA-LF - индуктивности соответствующих фаз; Lов - индуктивность обмотки возбуждения; БСОВ - блок сравнения текущих значений заданного тока и тока обмотки возбуждения; iов - текущее значение тока обмотки возбуждения; БВМ - блок выделения модуля (линейный выпрямитель).
Регулятор момента шестифазного вентильно-индукторного двигателя с обмоткой возбуждения работает следующим образом. Резистором R задается амплитуда и полярность вектора тока Iз, БИП изменяет полярность Iз на противоположную. Сигналы различной полярности, пропорциональные Iз, подаются на входы переключателей соответствующих фаз ПА, ПВ, ПС, на управляющие входы которых подаются сигналы с выходов постоянных запоминающих устройств соответствующих фаз ПЗУА, ПЗУВ, ПЗУС, соединенных с датчиком положения ротора. Сигналы с ПА, ПВ, ПС и ПЗУА, ПЗУВ, ПЗУС подаются на входы цифроаналоговых преобразователей соответствующих фаз ЦАПА, ЦАПВ, ЦАПС, на выходах которых формируется трехфазное синусоидальное напряжение, амплитуда которого пропорциональна Iз, частота - частоте вращения ротора, а при изменении полярности Iз при помощи резистора R происходит сдвиг токов фаз на 180 электрических градусов. Заданные токи фаз сравниваются при помощи блоков сравнения текущих значений заданных токов и токов обмоток соответствующих фаз БСА, БСВ, БСС, причем сигналы, пропорциональные токам фаз, поступают с трех датчиков токов ДТ1-ДТ3, а сигналы, пропорциональные заданным токам фаз, поступают с выходов трех цифроаналоговых преобразователей ЦАПА, ЦАПВ, ЦАПС, а их разность поступает на входы компараторов с гистерезисом K1-K6, которые совместно с блоками, имеющими коэффициент передачи, равный -1, - Б1, Б2, Б3 и трехфазным инвертором, выполненным на транзисторах VT1-VT6 и на диодах VD1-VD6, формируют трехфазные токи, средняя величина которых имеет синусоидальную форму и амплитуду, пропорциональную Iз. Заданное резистором R напряжение, пропорциональное Iз, подается на вход блока выделения модуля БВМ, с выхода которого напряжение, имеющее только положительную полярность, подается на входы блока сравнения текущих значений заданного тока и тока обмотки возбуждения БСОВ, на второй вход которого подается напряжение, пропорциональное току в обмотке возбуждения, с выхода датчика тока. С выхода БСОВ сигнал подается на компараторы K7 и K8, которые управляют полумостовым инвертором на транзисторах VT7 и VT8 и на диодах VD7 и VD8 и формируют постоянный ток в обмотке возбуждения, средняя величина которого пропорциональна Iз. Благодаря конфигурации вентильно-индукторного двигателя, показанной на фиг.1, и схеме включения обмоток, показанной на фиг.3, среднее значение полных токов обмоток каждого полюса равно сумме токов фазной обмотки и обмотки возбуждения in=Imax{1+sin[θ+(n-1)60°]}, где in - среднее значение полных токов обмоток n-го полюса статора; Imax - максимальное значение токов фазных обмоток; θ - угловое положение ротора в электрических градусах; n=1…12 - номер полюса статора. При этом крутящий момент, развиваемый полюсами 1 и 7, равен  , где IA max - максимальное значение тока фазы А. Для того чтобы
, где IA max - максимальное значение тока фазы А. Для того чтобы  , необходимо применение конструкции полюсов ротора и статора, поверхности полюсов которых показаны на фиг.2. При этом
, необходимо применение конструкции полюсов ротора и статора, поверхности полюсов которых показаны на фиг.2. При этом  . Результаты расчета вращающего момента от фазы А, проведенные при помощи прикладной программы MathCad для линейной модели предлагаемого двигателя, в относительных единицах (то есть при IA max=1 и
. Результаты расчета вращающего момента от фазы А, проведенные при помощи прикладной программы MathCad для линейной модели предлагаемого двигателя, в относительных единицах (то есть при IA max=1 и  показаны на фиг.4. Так как фазные токи и изменение индуктивностей обмоток фаз по углу поворота ротора, смежных полюсов сдвинуты на угол, равный 60 электрических градусов, то и вращающие моменты фаз смежных полюсов сдвинуты на угол, равный 60 электрических градусов, а суммарный момент от всех фаз постоянный, не зависит от углового положения ротора, как показано на фиг.4.
показаны на фиг.4. Так как фазные токи и изменение индуктивностей обмоток фаз по углу поворота ротора, смежных полюсов сдвинуты на угол, равный 60 электрических градусов, то и вращающие моменты фаз смежных полюсов сдвинуты на угол, равный 60 электрических градусов, а суммарный момент от всех фаз постоянный, не зависит от углового положения ротора, как показано на фиг.4.
Таким образом, использование в электроприводах различных механизмов и исполнительных устройствах автоматических систем шестифазных вентильно-индукторных двигателей с 12 полюсами статора и 10 полюсами ротора, содержащих явнополюсный ротор со скошенными полюсами, с угловой шириной полюса ротора, равной угловой ширине межполюсного расстояния ротора и равной 18°, с углом скоса полюса ротора по оси, равным 6°, угловой шириной полюса статора, равной 12°, угловой шириной межполюсного расстояния статора, равной 18°, с каждым полюсом статора, оснащенным двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, с фазными обмотками фазы А, соединенными последовательно с фазными обмотками фазы D, фазными обмотками фазы В, соединенными последовательно с фазными обмотками фазы Е, фазными обмотками фазы С, соединенными последовательно с фазными обмотками фазы F, с тремя концами этих попарно последовательно соединенных обмоток, соединенными в «звезду», и с остальными тремя концами, соединенными с выходами трехфазного мостового инвертора и питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, с обмотками возбуждения каждого из полюсов, соединенными последовательно, подключенными к выходам однофазного мостового инвертора, питающимися постоянным током, с величиной, равной амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи токового способа управления, позволяет уменьшить пульсации момента, приводящие к пульсациям скорости при малых скоростях, и уменьшает уровень шумов и вибраций.
Использование предлагаемого технического решения в электроприводах различных механизмов и исполнительных устройствах обеспечит повышение эффективности и качества работы этих устройств.
Изобретение относится к области электротехники и может быть использовано в электроприводах различных механизмов и исполнительных устройствах автоматических систем. Техническим результатом является уменьшение шумов и вибраций и увеличение равномерности крутящего момента. В шестифазном вентильно-индукторном двигателе производные индуктивностей обмоток фаз по углу поворота ротора имеют синусоидальную форму, а высшие гармоники отсутствуют, за счет определенных соотношений угловых размеров полюсов ротора и статора, а полюса ротора имеют скосы в осевом направлении. Кроме того, полные токи обмоток фаз содержат в своем составе только нулевую и первую гармоники и не содержат высших гармоник. Это осуществляется за счет того, что каждый полюс статора оснащен двумя обмотками, через одну из которых протекает нулевая гармоника (постоянная составляющая), через другую обмотку протекает ток, имеющий синусоидальную форму. Амплитуда тока синусоидальной формы равна величине постоянного тока. Синусоидальные токи формируются при помощи трехфазного мостового инвертора, а постоянный ток формируется полумостовым инвертором. Используется релейно-токовый способ управления. 5 ил.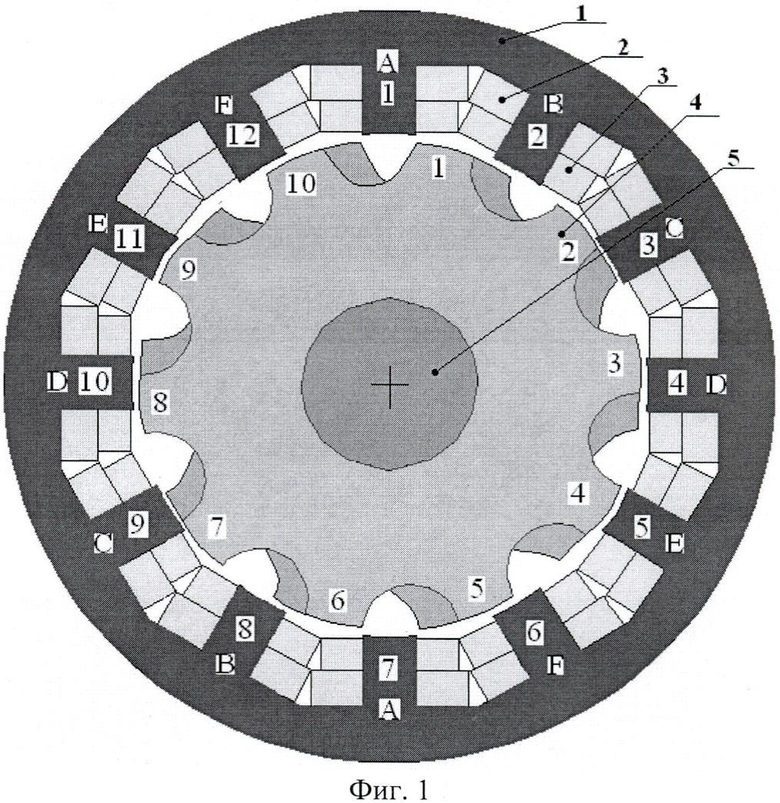
Шестифазный вентильно-индукторный двигатель, содержащий явнополюсный статор с 12 сосредоточенными обмотками и ротор с 10 прямыми полюсами без обмоток и без магнитов, управляемый при помощи системы, коммутирующей напряжение фаз, содержащей схему управления, силовой инвертор и датчик положения ротора, отличающийся тем, что двигатель оснащен ротором со скошенными полюсами, с угловой шириной полюса ротора, равной угловой ширине межполюсного расстояния ротора и равной 18°, с углом скоса полюса ротора по оси, равным 6°, угловой шириной полюса статора, равной 12°, угловой шириной межполюсного расстояния статора, равной 18°, с каждым полюсом статора, оснащенным двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, с фазными обмотками фазы А, соединенными последовательно с фазными обмотками фазы D, фазными обмотками фазы В, соединенными последовательно с фазными обмотками фазы Е, фазными обмотками фазы С, соединенными последовательно с фазными обмотками фазы F, с тремя концами этих попарно последовательно соединенных обмоток, соединенными в «звезду», и с остальными тремя концами, соединенными с выходами трехфазного мостового инвертора и питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на 60 электрических градусов, с обмотками возбуждения каждого из полюсов, соединенными последовательно, подключенными к выходам однофазного полумостового инвертора, питающимися постоянным током, с величиной, равной амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи токового способа управления.
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2084070C1 |
| МЕХАТРОННАЯ СИСТЕМА | 2009 |
|
RU2404503C1 |
| РЕВЕРСИВНЫЕ ВЕНТИЛЬНО-ИНДУКТОРНЫЕ ДВИГАТЕЛИ С ЧИСЛОМ ФАЗ, БОЛЬШИМ ИЛИ РАВНЫМ ТРЕМ, И ДВУХПОЛЮСНЫМ РОТОРОМ | 2009 |
|
RU2396674C1 |
| Машина для квадратной посадки рассады в торфоперегнойных горшочках | 1953 |
|
SU99663A1 |
| СПОСОБ КИСЛОРОДНОЙ ОЧИСТКИ И ПАССИВАЦИИ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ КОТЕЛЬНЫХ ТРУБ | 2006 |
|
RU2303745C1 |
| US 6479953 В2, 12.11.2002 | |||
| Сверхвысокочастотное устройство связи | 1976 |
|
SU720694A1 |
| Способ изготовления оболочковых форм,получаемых по выплавляемым моделям | 1983 |
|
SU1139560A1 |
| WO 199001823 А1, 22.02.1990 | |||
| KR 1020060105828 А, 11.10.2006. | |||

