(54) МАГНИТНЫЙ ПОДШИПНИК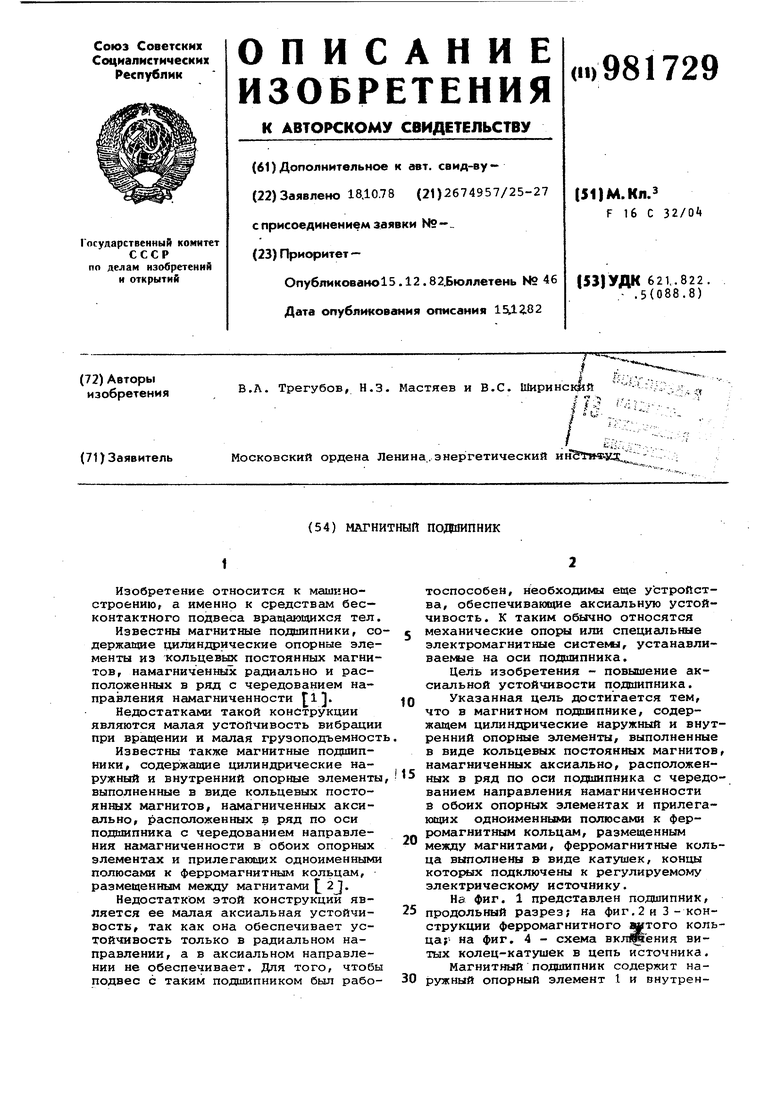
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА | 1998 |
|
RU2147153C1 |
| Электродвигатель | 1978 |
|
SU748702A1 |
| ЭЛЕКТРОМАШИНА | 2014 |
|
RU2544009C1 |
| Магнитный подшипник | 2019 |
|
RU2724913C1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ РАЗГРУЗКИ РАДИАЛЬНЫХ ПОДШИПНИКОВ | 2001 |
|
RU2207455C2 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| ПОЛЯРИЗОВАННЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2074486C1 |
| МЕХАНИЗМ ДЛЯ УВЕЛИЧЕНИЯ ЖЕСТКОСТИ ДЛЯ ПОДШИПНИКА НА МАГНИТНОЙ ПОДВЕСКЕ, ПОДШИПНИК НА МАГНИТНОЙ ПОДВЕСКЕ И НАСОС ДЛЯ КРОВИ | 2020 |
|
RU2772509C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
Изобретение относится к машиностроению, а именно к средствам бесконтактного подвеса вращающихся тел.
Известны магнитные подшипники, содержёицие цилиндрические опорные элементы из кольцевьпс постоянных магнитов, намагниченшлх радиально и расположенных в ряд с чередованием направления намагниченности
Недостатками такой конструкции являются малая устойчивость вибрации при вращении и малая грузоподъемность,
Известны также магнитные подшипники, содержащие цилиндрические наружный и внутренний опорные элементы, выполненные в виде кольцевых постоянных магнитов, намагниченных аксиально, расположенных в ряд по оси подшипника с чередованием направления намагниченности в обоих опорных элементах и прилеганицих одноименными полюсами к ферромагнитным кольцам, размещенным между магнитами 2J.
Недостатком этой конструкции является ее малая аксиальная устойчивость, так как она обеспечивает устойчивость только в рсщиальном направлении, а в аксиальном направлении не обеспечивает. Для того, чтобы подвес с таким подшипником был работоспособен, необходимы еще устройства, обеспечивающие аксиальную устойчивость. К таким обычно относятся механические опорял или специальные электромагнитные системы, устанавлиBaeNue на оси подфоипника.
Цель изобретения - повышение аксиальной устойчивости подшипника.
Указанная цель достигается тем,
10 что в магнитном подшипнике, содержащем цилиндрические наружный и внутренний опорные элементы, выполненные в виде кольцевых постоянных магнитов, намагниченных аксиально, расположен15ных в ряд по оси подшипника с чередованием направления намагниченности в обоих опорных элементах и прилегающих одноименными полюсами к ферромагнитным кольцам, размещенным
20 между магнитами, ферромагнитные кольца выполнены в виде катушек, концы KOToj Jx подключены к регулируемому электрическому источнику.
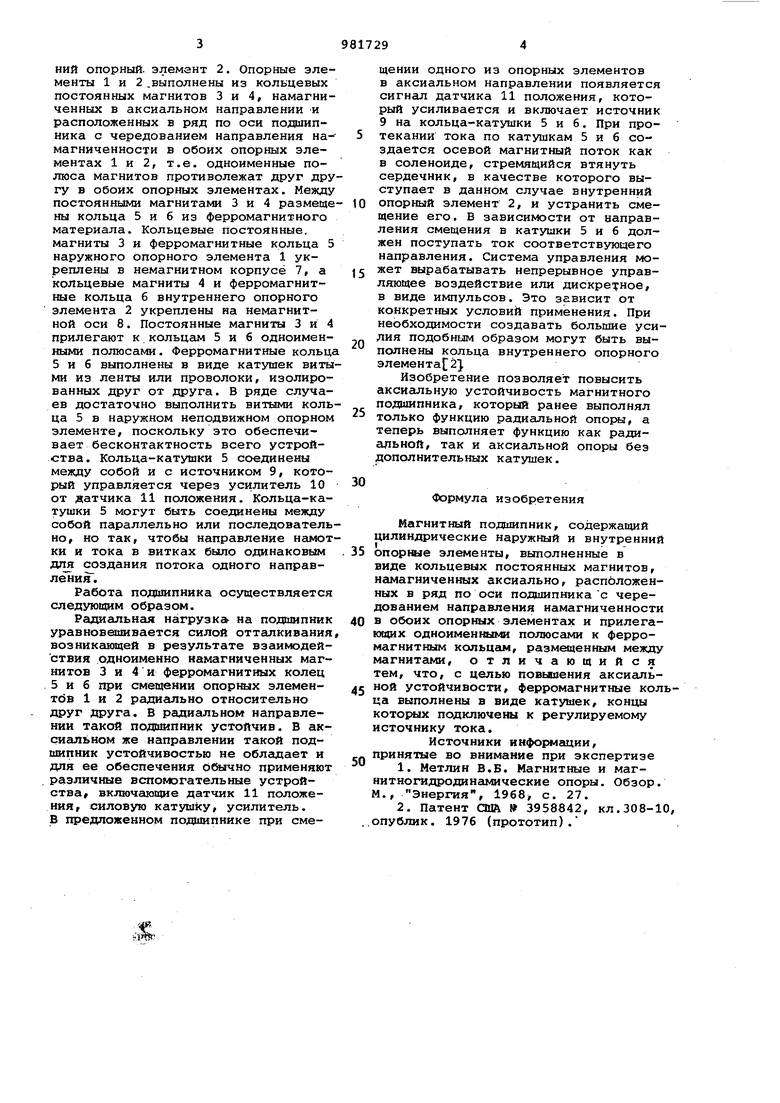
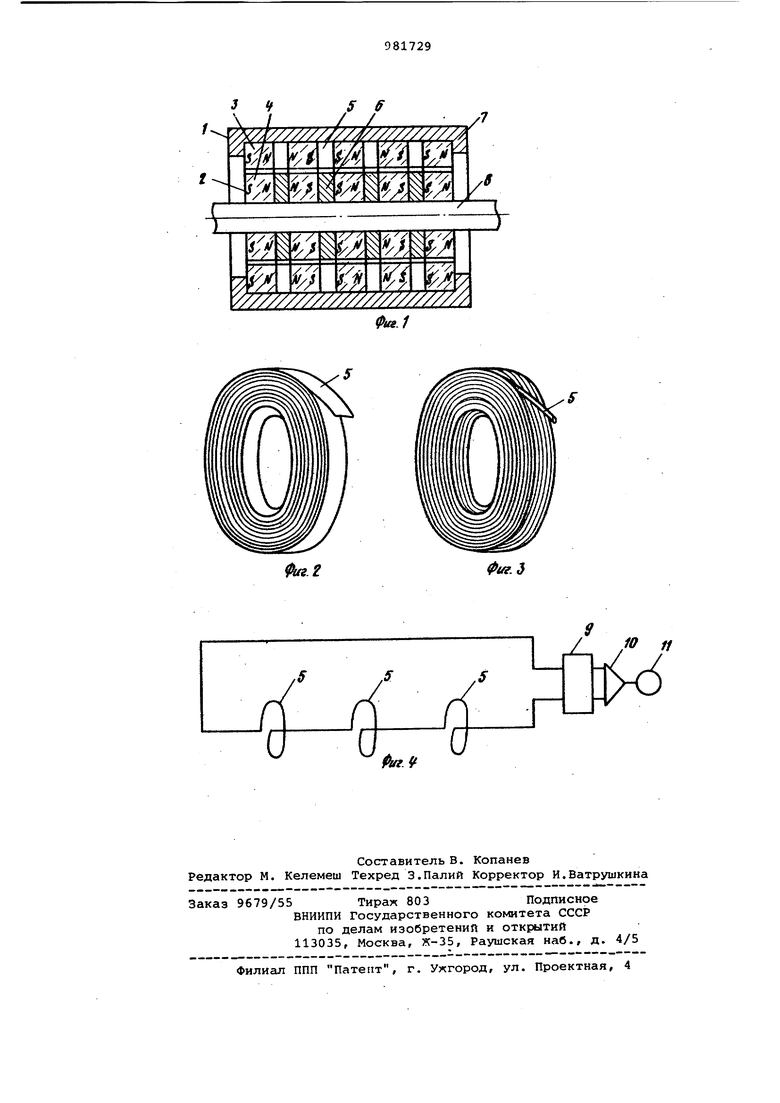
На фиг. 1 представлен подшипник, 25 продольный разрез; на фиг.2иЗ-конструкции ферромагнитного аитого кольца; на фиг, 4 - схема вклЖения витых колец-катушек в цепь источника.
Магнитный подшипник содержит наружный опорный элемент 1 и внутренНИИ опорный, элемент 2. Опорные элементы 1 и 2 .выполнены из кольцевых постоянных магнитов 3 и 4, намагниченных в аксиальном направлении и расположенных в ряд по оси подшипника с чередованием направления намагниченности в обоих опорных элементах 1 и 2, т.е. одноименные полюса магнитов противолежат друг другу в обоих опорных элементах. Между постоянными магнитами 3 и 4 размещены кольца 5 и 6 из ферромагнитного материала. Кольцевые постоянные, магниты 3 и ферромагнитные кольца 5 наружного опорного элемента 1 укреплены в немагнитном корпусе 7, а кольцевые магниты 4 и ферромагнитные кольца б внутреннего опорного элемента 2 укреплены на немагнитной оси 8. Постоянные магниты 3 и 4 прилегают к кольцам 5 и б одноименными полюсами. Ферромагнитные кольца 5 и б выполнены в виде катушек витыми из ленты или проволоки, изолированных друг от друга. В ряде случаев достаточно выполнить виилми кольца 5 в наружном неподвижном опорном элементе, поскольку это обеспечивает бесконтактность всего устройства. Кольца-катушки 5 соединены между собой и с источником 9, который управляется через усилитель iO от датчика 11 положения. Кольца-катушки 5 могут быть соединены между собой параллельно или последовательно, но так, чтобы направление намотки и тока в витках было одинаковым для создания потока одного направления.
Работа подпшпиика осуществляется следующим образом.
Радиальная нагрузк на подшипник уравновешивается силой отталкивания возникаиицей в результате взаимодействия одноименно намагниченных магнитов 3 и 4 и ферромагнитных колец 5 и б при смещении опорных элементбв 1 и 2 радиально относительно друг друга. В радиальном направлении такой подшипник устойчив. В аксиальном же направлении такой подшипник устойчивостью не обладает и для ее обеспечения Обычно применяют различные вспомогательные устройства, включающие датчик 11 положения, силовую катушку, усилитель. В предложенном подшипнике при смещении одного из опорных элементов в аксиальном направлении появляется сигнал датчика 11 положения, который усиливается и включает источник 9 на кольца-катушки 5 и 6. При протекании тока по катушкам 5 и б создается осевой магнитный поток как в соленоиде, стремящийся втянуть сердечник, в качестве которого выступает в данном случае внутренний
0 опорный элемент 2, и устранить смещение его. В зависимости от направления смещения в катушки 5 и 6 должен поступать ток соответствующего направления. Система управления может вырабатывать непрерывное управляющее воздействие или дискретное, в виде импульсов. Это зависит от конкретных условий применения. При необходимости создавать большие усиЛИЯ подобным образом могут быть выполнены кольца внутреннего опорного элемента 2}
Изобретение позволяет повысить аксиальную устойчивость магнитного подшипника, который ранее выполнял
только функцию радиальной опоры, а теперь выполняет функцию как радиальной, так и аксиальной опоры без дополнительных катушек.
Формула изобретения
Магнитный подшипник, содержащий цилиндрические наружный и внутренний
5 опорные элементы, выполненные в
виде кольцевых постоянных магнитов, намагниченных аксиально, расположенных в ряд по оси подшипника с чередованием направления намагниченности
0 в обоих опорных элементах и прилегакедих одноименными полюсами к ферромагнитным кольцам, размещенным между магнитгили, отличающийся тем, что, с целью повышения аксиапь5 ной устойчивости, ферромагнитные кольца выполнены в виде катушек, концы которых подключены к регулируемому источнику тока.
Источники информации.
принятые во внимание при экспертизе
1
г#
X
//V
/
Х
J
If/
ш
fe
к
Ф1а.5
