Изобретение относится к области энергомашиностроения и может быть использовано для обеспечения бесконтактного вращения ротора электрических машин.
Известен магнитный подшипник [патент РФ №2089761 C1, F16C 32/04, 10.09.1997], содержащий вал, ротор из двух колец из постоянного магнита, намагниченный в осевом направлении, статор, включающий полюсный элемент и две кольцевые катушки. В осевом зазоре между кольцами ротора установлен кольцевой диск из немагнитного материала с высокой электропроводностью.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления угловыми перекосами в осевом направлении.
Известен упорный магнитный подшипник с подмагничиванием постоянным магнитным полем смещения (патент РФ №2138706 C1, F16C 32/04, F16C 39/06, 27.09.1999), содержащий вращающийся элемент (или вал) с ободом (или опорным участком) кольцевой формы, находящимся между парой зубцов подковообразного управляющего элемента. Постоянным магнитом создается магнитное поле, распространяющееся через нависающую консоль и порождающее силу притяжения между подмагниченными поверхностью консоли и верхней торцевой поверхностью вала. Эта смещающая сила притяжения поддерживает вал в равновесии так, что обод находится между поверхностями пары зубцов и равноудален от них. Внутри подковообразного управляющего элемента вокруг вала намотаны обмотки.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления угловыми перекосами в осевом направлении.
Известна опора [патент РФ №2178243 C2, G05H 1/00, 10.01.2002], содержащая установленный в корпусе цилиндрический аксиально намагниченный магнит, размещенную на роторе соосно ферромагнитную втулку, расположенную напротив нижнего торца магнита, и кольцевую камеру с демпфирующей жидкостью. Камера снабжена внутри радиально подвижным кольцевым элементом, подвешенным на гибких нитях и состоящим из внутреннего ферромагнитного кольца и связанного с ним наружного немагнитного кольца.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления угловыми перекосами в осевом направлении.
Известна магнитная опора компрессора [патент РФ №2251033 C2, F16C 32/04, 27.04.2005], содержащая вал, радиальный электромагнит, который располагается в части корпуса, примыкающей к корпусу компрессора, осевой электромагнит, установленный в части корпуса ближе к концу вала.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления угловыми перекосами в осевом направлении.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является подшипник системы энергонезависимого активного магнитного подвеса ротора [патент РФ №2246644 C1, F16C 32/04, 20.02.2005], содержащий вал, корпус, размещенный в корпусе статор радиальной опоры и установленный на валу соответствующий ему ротор с зубцами на цилиндрической поверхности, статор и ротор осевой электромагнитной опоры. На среднем полюсе статора радиальной опоры расположена обмотка возбуждения, а на его боковых полюсах - генераторные обмотки, соединенные последовательно-встречно и подключенные свободными выводами к входам выпрямителя напряжения, статором и ротором осевой опоры, страховочным шарикоподшипником, внешней обоймой контактирующим с корпусом упругими элементами, выполненными с возможностью перемещения вала в осевом и радиальном направлениях, комбинированным датчиком регистрации радиального и осевого положений роторов опор.
Недостатками данного устройства являются ограниченные функциональные возможности, обусловленные отсутствием управления угловыми перекосами в осевом направлении.
Задача полезной модели - расширение функциональных возможностей путем введения управления угловыми перекосами.
Техническим результатом является повышение управляемости положения вала в магнитных подшипниках.
Поставленная задача решается и указанный технический результат достигается тем, что в гибридном магнитном подшипнике с осевым управлением, содержащем вал, корпус, радиальную магнитную опору, статор и ротор осевой электромагнитной опоры, страховочные механические подшипники, датчики перемещения, согласно изобретению статор осевой электромагнитной опоры выполнен в виде четырех Ш-образных электромагнитов, установленных на кольце, а ротор осевой электромагнитной опоры выполнен в виде ферромагнитного диска, установленного на валу, при этом радиальная магнитная опора выполнена в виде коаксиально расположенных одноименными полюсами друг относительно друга подвижных и неподвижных кольцевых постоянных магнитов.
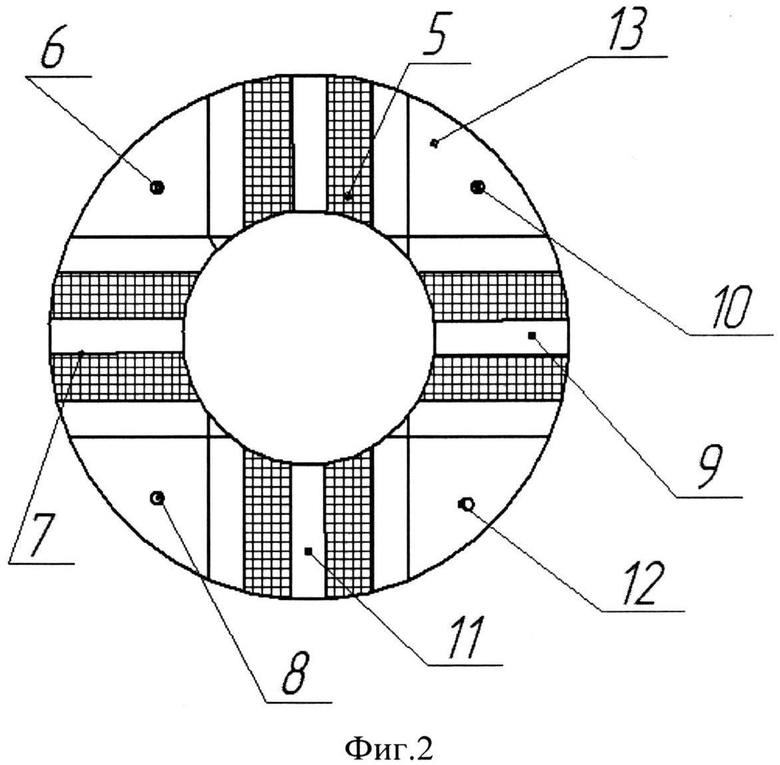
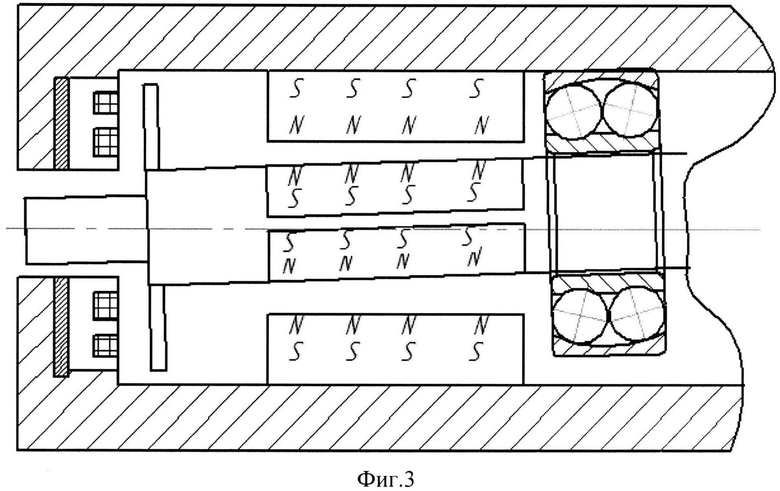
Сущность изобретения поясняется чертежами. На фиг.1 изображен общий вид гибридного магнитного подшипника с осевым управлением. На фиг.2 изображено кольцо с установленными на нем Ш-образными электромагнитами. На фиг.3 изображены угловые перемещения в гибридном магнитном подшипнике с осевым управлением.
Предложенное устройство содержит (фиг.1) вал 1, корпус 2, радиальную магнитную опору, выполненную в виде коаксиально расположенных одноименными полюсами друг к другу неподвижных кольцевых постоянных магнитов 3, установленных в корпусе 2, и подвижных кольцевых постоянных магнитов 4, установленных на валу 1. Статор осевой электромагнитной опоры, содержащий первый Ш-образный электромагнит 5 с первым датчиком перемещения 6, второй Ш-образный электромагнит 7 со вторым датчиком перемещения 8 (фиг.2), третий Ш-образный электромагнит 9 с третьим датчиком перемещения 10, четвертый Ш-образный электромагнит 11 с четвертым датчиком перемещения 12, установленные на кольце 13, запрессованном в корпус 2, ротор осевой электромагнитной опоры, выполненный в виде ферромагнитного диска 14, установленного на валу 1, страховочные механические подшипники 15, установленные также на валу 1.
Гибридный магнитный подшипник с осевым управлением работает следующим образом: между неподвижными кольцевыми постоянными магнитами 3 и подвижными кольцевыми постоянными магнитами 4 радиальной магнитной опоры возникают силы отталкивания, которые обеспечивают бесконтактное вращение вала 1. При осевом смещении вала 1 под действием осевой составляющей силы отталкивания кольцевых постоянных магнитов 3, 4 возникают угловые перекосы вала 1 и расположенного на нем ротора осевой электромагнитной опоры, выполненного в виде ферромагнитного диска 14 (фиг.3). При этом первым 6, вторым 8, третьим 10, четвертым 12 датчиком перемещения определяется наибольший угол перекоса, после чего происходит ослабление электромагнитных сил, путем автоматического понижения управляющего тока или напряжения, на одном из Ш-образных электромагнитов 5, 7, 9, 11 соответствующего максимальному углу перекоса. При этом автоматически усиливается управляющий ток или напряжение, на одном из Ш-образных электромагнитов 5, 7, 9, 11, который расположен противоположно Ill-образному электромагниту 5, 7, 9, 11, соответствующему максимальному углу перекоса.
Таким образом, повышается управляемость положением вала в магнитных подшипниках.
Итак, заявляемое изобретение позволяет расширить функциональные возможности гибридного магнитного подшипника с осевым управлением путем введения управления угловыми перекосами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| СИСТЕМА НА ГИБРИДНЫХ МАГНИТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2547450C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОДВЕС ВЕРТИКАЛЬНОГО ВАЛА РОТОРА | 2016 |
|
RU2626794C1 |
| Система на магнитных подшипниках | 2016 |
|
RU2626461C1 |
| ТУРБОКОМПРЕССОР С ГАЗОМАГНИТНЫМИ ПОДШИПНИКАМИ | 2014 |
|
RU2549002C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ИСПОЛЬЗОВАНИЕМ СИЛ ЛОРЕНЦА (ВАРИАНТЫ) | 2016 |
|
RU2636629C1 |
| ТУРБОКОМПРЕССОР (ВАРИАНТЫ) | 2013 |
|
RU2559106C2 |
| Способ управления положением ротора электрической машины на бесконтактных подшипниках (варианты) и электрическая машина для его реализации | 2017 |
|
RU2656871C1 |
Изобретение относится к области энергомашиностроения и может быть использовано для обеспечения бесконтактного вращения ротора электрических машин. Гибридный магнитный подшипник с осевым управлением содержит вал (1), корпус (2), радиальную магнитную опору, статор и ротор осевой электромагнитной опоры, страховочные механические подшипники (15) и четыре датчика перемещения (6, 8, 10, 12). Радиальная магнитная опора выполнена в виде коаксиально расположенных одноименными полюсами друг к другу неподвижных кольцевых постоянных магнитов (3), установленных в корпусе (2), и подвижных кольцевых постоянных магнитов (4), установленных на валу (1). Статор выполнен в виде четырех Ш-образных электромагнитов (5, 7, 9, 11), установленных на кольце (13). Ротор выполнен в виде ферромагнитного диска (14), установленного на валу (1). Технический результат: повышение управляемости положения вала в магнитных подшипниках и расширение функциональных возможностей путем введения управления угловыми перекосами. 3 ил.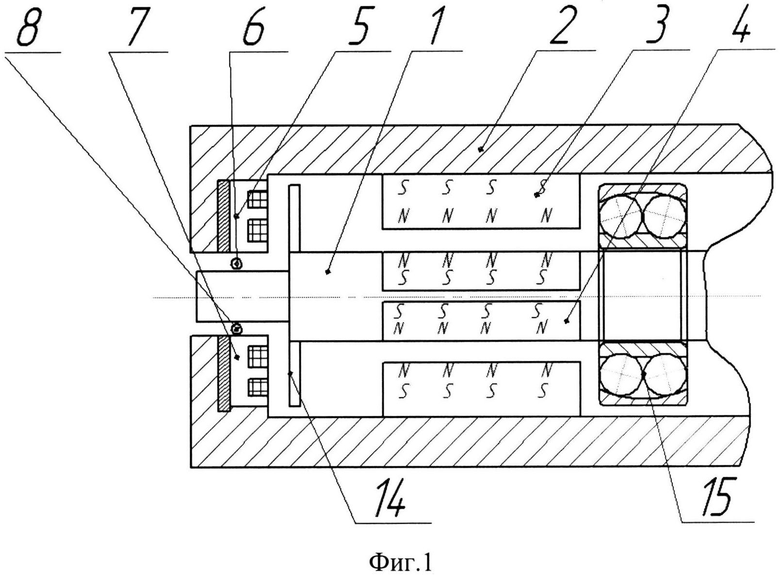
Гибридный магнитный подшипник с осевым управлением, содержащий вал, корпус, радиальную магнитную опору, статор и ротор осевой электромагнитной опоры, страховочные механические подшипники, датчики перемещения, отличающийся тем, что статор осевой электромагнитной опоры выполнен в виде четырех Ш-образных электромагнитов, установленных на кольце, а ротор осевой электромагнитной опоры выполнен в виде ферромагнитного диска, установленного на валу, при этом радиальная магнитная опора выполнена в виде коаксиально расположенных одноименными полюсами относительно друг друга подвижных и неподвижных кольцевых постоянных магнитов.
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| Способ предупреждения прилипания асфальтового гудрона к стенкам металлических бидонов, форм и т.п. | 1931 |
|
SU33625A1 |
| УЛАВЛИВАЮЩИЙ ПОДШИПНИК ДЛЯ УЛАВЛИВАНИЯ РОТОРНОГО ВАЛА МАШИНЫ | 2010 |
|
RU2494292C1 |
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |
| WO 2007066474 A1, 14.06.2007 | |||

