ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение, в общем, относится к области медицинских инструментов. Более конкретно, настоящее изобретение относится к механизму для увеличения жесткости, предназначенному для подшипника на магнитной подвеске, подшипнику на магнитной подвеске, содержащему механизм для увеличения жесткости, и насосу для крови.
УРОВЕНЬ ТЕХНИКИ
В случае, когда сердце теряет свою функцию нагнетания крови (например, при проведении хирургической операции с остановкой сердца, кардиогенном шоке и т.д.), для замены сердца может использоваться насос для крови, чтобы способствовать поддержанию кровообращения в теле человека. Насос для крови может представлять собой имплантируемый насос для крови, который имплантируется в тело пациента для временного или постоянного поддержания кровообращения в организме человека, или экстракорпоральный насос для крови, который можно использовать вне тела человека.
В насосе для крови предпочтительно использовать подшипник на магнитной подвеске. Подшипник на магнитной подвеске, функционирующий с использованием магнитной силы, обычно включает в себя ротор, способный совершать вращение вокруг определенной оси вращения, а также механизм для создания магнитной силы, создающий магнитную силу для подвешивания ротора. В зависимости от механизма для создания магнитной силы подшипник на магнитной подвеске можно классифицировать как активный подшипник на магнитной подвеске или пассивный подшипник на магнитной подвеске, при этом механизм для создания магнитной силы активного подшипника на магнитной подвеске может представлять собой электромагнит, в то время как механизм для создания магнитной силы пассивного подшипника на магнитной подвеске может представлять собой постоянный магнит или ферромагнитный материал. Активный подшипник на магнитной подвеске обычно дополнительно включает в себя датчик смещения, а также контроллер, управляющий величиной тока, протекающего через электромагнит, на основе сигнала от датчика смещения для регулировки электромагнитной силы подвески. В процессе работы координаты ротора, относящиеся к степеням свободы активной магнитной подвески, сначала передаются контроллеру датчиком смещения, после чего контроллер обеспечивает ток определенной величины в электромагните посредством соответствующего алгоритма управления (PID, PI, PD-управления и т.д.), чтобы создать контролируемую электромагнитную силу подвески. Пассивный подшипник на магнитной подвеске генерирует силу притяжения или силу отталкивания на основе взаимодействия между двумя или более постоянными магнитами или между постоянным магнитом и ферромагнитным материалом для подвешивания ротора в уравновешенном положении.
В сравнении с традиционным подшипником, таким как механический подшипник, ротор подшипника на магнитной подвеске не имеет физического контакта с другими компонентами (например, механизмом для создания магнитной силы и т.д.), при этом ротор может быть разнесен от других компонентов на большое расстояние, что дает подшипнику на магнитной подвеске значительное преимущество. С одной стороны, можно исключить механический износ соответствующих компонентов подшипника на магнитной подвеске вследствие отсутствия физического контакта; с другой стороны, большой зазор позволяет текучей среде, поступающей через этот зазор, испытывать меньшие сдвиговые напряжения, что в случае, когда текучая среда представляет собой кровь, может помочь уменьшить повреждения, причиняемые клеточным элементам крови, а значит, может повысить совместимость с кровью.
ФИГ. 1 - схематичный вид активного подшипника 10 на магнитной подвеске. Активный подшипник 10 на магнитной подвеске включает в себя: ротор 101, способный совершать вращение вокруг оси вращения A; электромагнит 102, создающий электромагнитную силу для подвешивания ротора 101, при этом между ротором 101 и электромагнитом 102 имеется зазор или воздушный зазор G1; датчик 103 смещения для детектирования смещения ротора 101 относительно электромагнита 102; а также контроллер 104, управляющий величиной тока, протекающего через электромагнит 102, на основе сигналов от датчика 103 смещения для регулировки электромагнитной силы подвески.
В активном подшипнике 10 на магнитной подвеске, показанном на ФИГ. 1, электромагнит 102 создает радиальную электромагнитную силу (т.е. электромагнитную силу в плоскости X-Y) для ротора 101 для устойчивого подвешивания ротора 101 в радиальном направлении. Однако активный подшипник 10 на магнитной подвеске, показанный на ФИГ. 1, подвержен образованию крутильного перемещения вокруг X-оси или Y-оси. Другими словами, активный подшипник 10 на магнитной подвеске, показанный на ФИГ. 1, имеет степень свободы для совершения кручения (т.е. степень свободы для совершения вращения вокруг X-оси или Y-оси, выступающей в качестве оси вращения), иначе говоря, активный подшипник 10 на магнитной подвеске, показанный на ФИГ. 1, имеет низкую крутильную жесткость, что является нежелательным. Требуется, чтобы подшипник на магнитной подвеске имел как можно большую крутильную жесткость, чтобы подшипник на магнитной подвеске не совершал или редко совершал крутильное перемещение.
Чтобы решить вышеуказанную проблему, используется известный способ, заключающийся в том, чтобы объединить множество слоев постоянных магнитов и ферромагнитных материалов для образования конструкции наподобие сэндвича, так что на плоскости, перпендикулярной оси вращения A (т.е. плоскости X-Y, показанный на ФИГ. 1), образуется множество параллельных толкающих и тянущих усилий, чтобы тем самым увеличить крутильную жесткость и повысить стойкость к кручению. Однако такая сэндвичевая конструкция имеет ряд недостатков. С одной стороны, сила постоянного магнита пропорциональна его объему: чем больше объем, тем больше сила постоянного магнита; с другой стороны, чем меньше объем постоянного магнита, тем более явно проявляется краевой эффект намагниченности (magnetization marginal effect) постоянного магнита. Иначе говоря, напряженность магнитного поля, создаваемая постоянным магнитом, образованным множеством малых постоянных магнитов, не равна напряженности магнитного поля, создаваемой единственным постоянным магнитом того же объема, а меньше нее. Таким образом, когда используется вышеупомянутая сэндвичевая конструкция, образованная множеством постоянных магнитов, чтобы достичь требуемой напряженности магнитного поля, равной той, что создается единственным постоянным магнитом, необходимо увеличить объем каждого малого постоянного магнита, что неизбежно может привести к увеличению общего объема подшипника на магнитной подвеске, тем самым ограничивая область его применения. Во многих современных областях применения обычно имеются жесткие ограничения в отношении объема ротора, при этом, как правило, требуется, чтобы ротор поддавался миниатюризации. Например, при применении в насосе для крови зазор или воздушный зазор в подшипнике на магнитной подвеске обычно совместно используется в качестве вспомогательного пути прохождения потока в насосе для крови. Когда кровь поступает по вспомогательному пути прохождения потока, который уже основного пути прохождения потока, она может испытывать сдвиговые напряжения в течение длительного времени, тем самым причиняя повреждения клеточным элементам крови. Таким образом, миниатюризация ротора, чтобы максимально уменьшить длину вспомогательного пути прохождения потока, весьма важна для совместимости насоса для крови с кровью. В данной области применения миниатюризация ротора является важной целью оптимизации; однако сэндвичевая конструкция противоречит достижению этой цели.
Таким образом, имеется потребность в дальнейшей модификации современных подшипников на магнитной подвеске.
СОДЕРЖАНИЕ ИЗОБРЕТЕНИЯ
Вышеупомянутые проблемы и другие задачи будут решены, а также дополнительные преимущества должны быть получены с помощью примеров осуществления настоящего изобретения.
Согласно первому аспекту примеров осуществления настоящего изобретения предложен механизм для увеличения жесткости для подшипника на магнитной подвеске. Подшипник на магнитной подвеске может включать в себя статор и ротор, расположенный в статоре, при этом статор включает в себя зубцы статора. Механизм для увеличения жесткости может содержать: постоянный магнит ротора, расположенный на стороне ротора, при этом постоянный магнит ротора параллелен главной плоскости ротора и примыкает к ротору, при этом главная плоскость ротора представляет собой плоскость симметрии ротора в радиальном направлении; постоянный магнит статора, расположенный на стороне зубцов статора, при этом постоянный магнит статора параллелен главной плоскости ротора и примыкает к зубцам статора, при этом сторона, на которой расположен постоянный магнит статора, является той же стороной, что и сторона, на которой расположен постоянный магнит ротора, при этом постоянный магнит статора разнесен от постоянного магнита ротора на определенное расстояние в радиальном направлении; а также осевой приводной блок, выполненный с возможностью быть обращенным к постоянному магниту ротора и быть разнесенным от постоянного магнита ротора на определенное расстояние в аксиальном направлении. Постоянный магнит ротора и ротор образуют роторный узел, который имеет асимметричную конструкцию относительно главной плоскости ротора. Механизм для увеличения жесткости выполнен так, что постоянный магнит статора генерирует радиальную силу притяжения для постоянного магнита ротора, а осевой приводной блок генерирует осевую силу отталкивания для постоянного магнита ротора, при этом величина осевой силы отталкивания изменяется с изменением осевого расстояния между осевым приводным блоком и постоянным магнитом ротора.
Согласно одному примеру осуществления настоящего изобретения постоянный магнит ротора и постоянный магнит статора могут иметь единственное направление (мононаправление) намагниченности (mono-magnetization direction).
Согласно одному примеру осуществления настоящего изобретения постоянный магнит ротора и/или постоянный магнит статора могут иметь аксиальное направление намагниченности.
Согласно одному примеру осуществления настоящего изобретения постоянный магнит ротора и/или постоянный магнит статора могут иметь радиальное направление намагниченности.
Согласно одному примеру осуществления настоящего изобретения постоянный магнит ротора и постоянный магнит статора могут представлять собой цельную конструкцию круглой формы.
Согласно одному примеру осуществления настоящего изобретения постоянный магнит ротора и/или постоянный магнит статора могут состоять из множества отдельных постоянных магнитов, разнесенных друг от друга в окружном направлении.
Согласно одному примеру осуществления настоящего изобретения осевой приводной блок может быть выполнен с возможностью стационарной установки.
Согласно одному примеру осуществления настоящего изобретения осевой приводной блок может представлять собой постоянный магнит.
Согласно одному примеру осуществления настоящего изобретения осевой приводной блок может представлять собой постоянный магнит, имеющий цельную конструкцию круглой формы.
Согласно одному примеру осуществления настоящего изобретения осевой приводной блок может состоять из множества отдельных постоянных магнитов, разнесенных друг от друга в окружном направлении.
Согласно одному примеру осуществления настоящего изобретения осевой приводной блок может представлять собой электромагнит или катушку с воздушным сердечником.
Согласно одному примеру осуществления настоящего изобретения осевой приводной блок может состоять из множества электромагнитов или катушек с воздушным сердечником, разнесенных друг от друга в окружном направлении.
Согласно одному примеру осуществления настоящего изобретения механизм для увеличения жесткости может дополнительно включать в себя контроллер или контур управления, который может по отдельности изменять величину тока, протекающего через каждый электромагнит или каждую катушку с воздушным сердечником, и соответственно может по отдельности изменять величину осевой силы отталкивания, генерируемой соответствующими одним или более электромагнитами или одной или более катушками с воздушным сердечником для постоянного магнита ротора.
Согласно одному примеру осуществления настоящего изобретения, когда возникает крутильное перемещение ротора относительно радиального направления, контроллер или контур управления механизма для увеличения жесткости уменьшает ток, протекающий через один или более электромагнитов или одну или более катушек с воздушным сердечником, соответствующих концу ротора, расположенному вдали от осевого приводного блока, и в то же время увеличивает ток, протекающий через один или более электромагнитов или одну или более катушек с воздушным сердечником, соответствующих другому концу ротора, расположенному вблизи осевого приводного блока.
Согласно одному примеру осуществления настоящего изобретения контроллер или контур управления механизма для увеличения жесткости также способен по отдельности изменять направление тока, протекающего через каждый электромагнит или каждую катушку с воздушным сердечником. Когда возникает крутильное перемещение ротора относительно радиального направления, контроллер или контур управления механизма для увеличения жесткости изменяет направление тока, протекающего через один или более электромагнитов или одну или более катушек с воздушным сердечником, соответствующих концу ротора, расположенному вдали от осевого приводного блока, чтобы заменить осевую силу отталкивания, генерируемую одним или более электромагнитами или одной или более катушками с воздушным сердечником для постоянного магнита ротора, на осевую силу притяжения.
Согласно второму аспекту примеров осуществления настоящего изобретения предложен подшипник на магнитной подвеске, который включает в себя механизм для увеличения жесткости согласно примерам осуществления настоящего изобретения.
Согласно одному примеру осуществления настоящего изобретения статор подшипника на магнитной подвеске может содержать множество зубцов статора, разнесенных друг от друга в окружном направлении, при этом каждый из зубцов статора снабжен катушкой магнитной подвески для подвешивания ротора подшипника на магнитной подвеске и управления перемещением ротора в радиальном направлении.
Согласно одному примеру осуществления настоящего изобретения каждый из зубцов статора может включать в себя горизонтальный участок и вертикальный участок, чтобы принять форму перевернутой буквы «L», при этом горизонтальный участок каждого зубца статора и ротор расположены по существу на одной высоте, при этом между горизонтальным участком статора и ротором имеется зазор, при этом катушка магнитной подвески навита на вертикальный участок зубца статора, при этом магнитный поток, генерируемый катушкой магнитной подвески, способен проходить через горизонтальный участок зубца статора, через зазор между горизонтальным участком статора и ротором, а также через ротор.
Согласно одному примеру осуществления настоящего изобретения каждый из зубцов статора может продолжаться от тела статора к центру в радиальном направлении, чтобы принять линейную форму, при этом каждый зубец статора и ротор расположены по существу на одной высоте, при этом между зубцом статора и ротором имеется зазор, при этом катушка магнитной подвески навита на зубец статора, при этом магнитный поток, генерируемый катушкой магнитной подвески, способен проходить через зубец статора, через зазор между зубцом статора и ротором, а также через ротор.
Согласно одному примеру осуществления настоящего изобретения подшипник на магнитной подвеске может дополнительно содержать датчик смещения и контроллер, при этом датчик смещения используется для измерения смещения ротора в радиальном направлении и отправки сигнала смещения в контроллер подшипника на магнитной подвеске, при этом контроллер подшипника на магнитной подвеске по отдельности изменяет величину и/или направление тока, протекающего через соответствующие одну или более катушек магнитной подвески, на основе сигнала смещения, чтобы тем самым управлять перемещением ротора в радиальном направлении.
Согласно одному примеру осуществления настоящего изобретения постоянный магнит статора механизма для увеличения жесткости может примыкать к поверхности статора.
Согласно одному примеру осуществления настоящего изобретения подшипник на магнитной подвеске может дополнительно содержать опорную конструкцию для поддержки осевого приводного блока механизма для увеличения жесткости.
Согласно одному примеру осуществления настоящего изобретения опорная конструкция может представлять собой часть статора подшипника на магнитной подвеске.
Согласно одному примеру осуществления настоящего изобретения опорная конструкция может представлять собой часть привода ротора подшипника на магнитной подвеске.
Согласно одному примеру осуществления настоящего изобретения опорная конструкция может представлять собой часть корпуса подшипника на магнитной подвеске.
Согласно одному примеру осуществления настоящего изобретения опорная конструкция может также использоваться для примыкания постоянного магнита статора механизма для увеличения жесткости к поверхности статора.
Согласно одному примеру осуществления настоящего изобретения ротор подшипника на магнитной подвеске может иметь форму диска.
Согласно одному примеру осуществления настоящего изобретения внутренняя периферийная поверхность постоянного магнита статора может располагаться вровень с внутренней периферийной поверхностью зубца статора подшипника на магнитной подвеске.
Согласно одному примеру осуществления настоящего изобретения наружная периферийная поверхность постоянного магнита ротора может располагаться вровень с наружной периферийной поверхностью ротора подшипника на магнитной подвеске.
Согласно одному примеру осуществления настоящего изобретения зубцы статора могут быть выполнены из магнитопроводящих материалов.
Согласно одному примеру осуществления настоящего изобретения зубцы статора могут быть выполнены из ферромагнитных материалов.
Согласно одному примеру осуществления настоящего изобретения ротор может быть выполнен из магнитопроводящих материалов.
Согласно одному примеру осуществления настоящего изобретения ротор может быть выполнен из ферромагнитных материалов.
Согласно третьему аспекту примеров осуществления настоящего изобретения предложен насос для крови, который включает в себя механизм для увеличения жесткости согласно примерам осуществления настоящего изобретения.
Согласно четвертому аспекту примеров осуществления настоящего изобретения предложен насос для крови, который включает в себя подшипник на магнитной подвеске согласно примерам осуществления настоящего изобретения.
Дополнительные и/или другие аспекты и преимущества настоящего изобретения будут изложены в нижеследующем описании либо могут стать очевидными из нижеследующего описания, либо могут быть изучены при практическом использовании настоящего изобретения. Различные технические признаки настоящего изобретения могут произвольно объединяться, если они не противоречат друг другу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Из нижеследующего подробного описания конкретных вариантов осуществления настоящего изобретения в сочетании с сопроводительными чертежами вышеупомянутые признаки и преимущества, а также другие признаки и преимущества настоящего изобретения, как и варианты их реализации, станут более очевидными.
ФИГ. 1 - схематичный вид подшипника на магнитной подвеске предшествующего уровня техники;
ФИГ. 2 - вид в перспективе подшипника на магнитной подвеске с механизмом для увеличения жесткости согласно одному варианту осуществления настоящего изобретения;
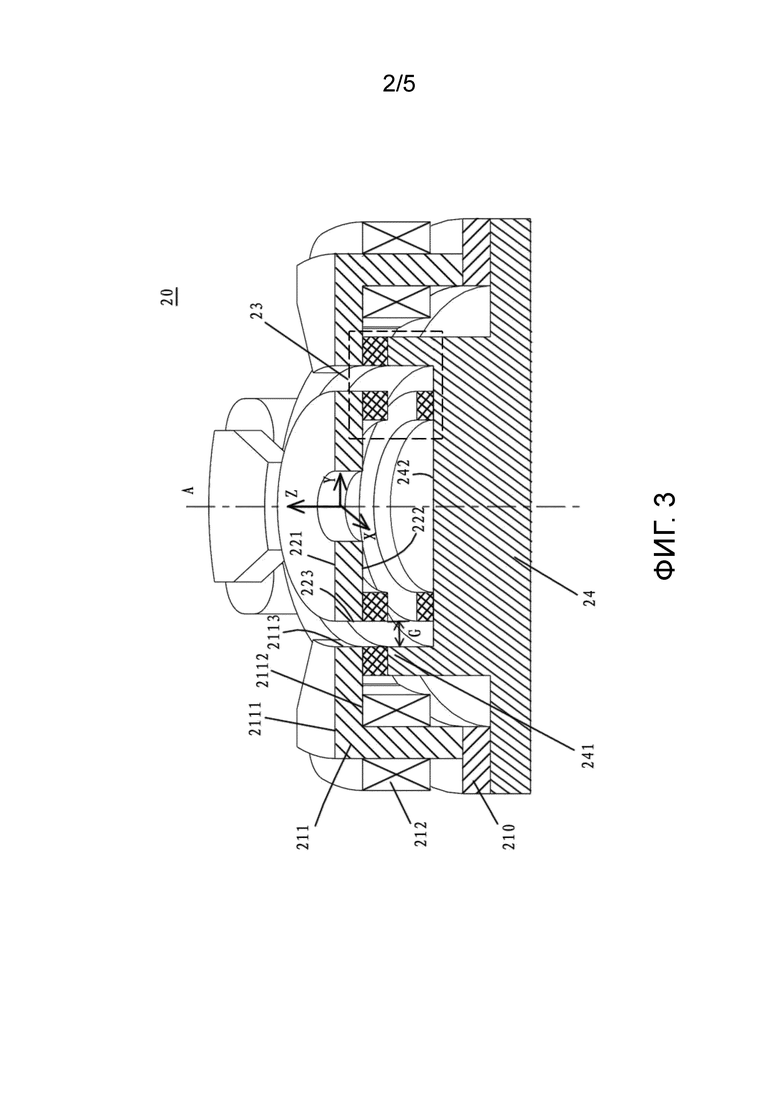
ФИГ. 3 - вид в разрезе подшипника на магнитной подвеске с механизмом для увеличения жесткости по ФИГ. 2;
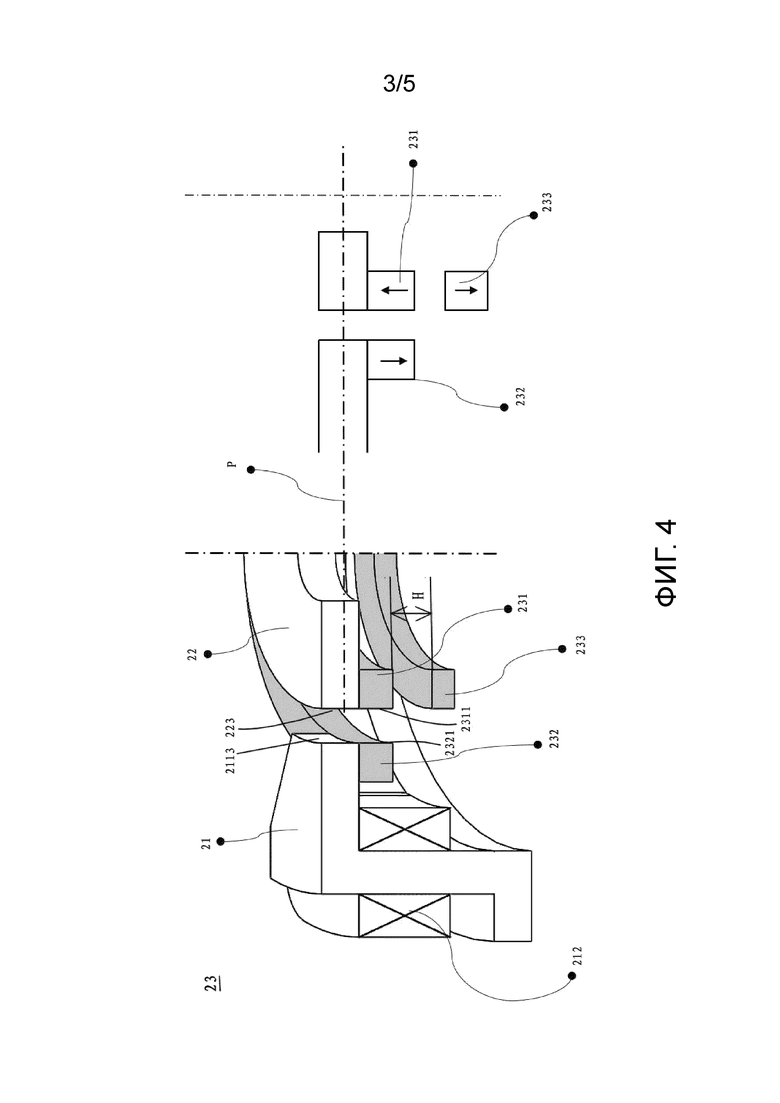
ФИГ. 4 - частичный вид в перспективе механизма для увеличения жесткости подшипника на магнитной подвеске по ФИГ. 2, где схематично показано направление намагничивания механизма для увеличения жесткости;
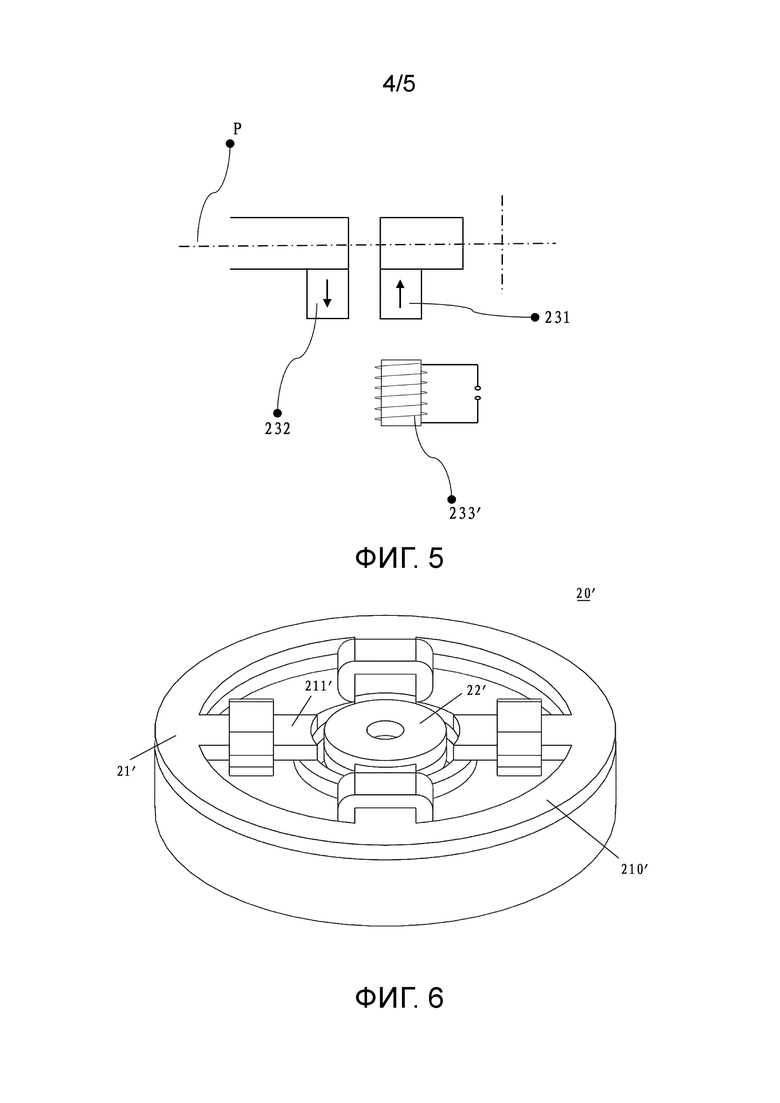
ФИГ. 5 - другой вариант осуществления осевого приводного блока механизма для увеличения жесткости по настоящему изобретению;
ФИГ. 6 - вид в перспективе подшипника на магнитной подвеске с механизмом для увеличения жесткости согласно другому варианту осуществления настоящего изобретения;
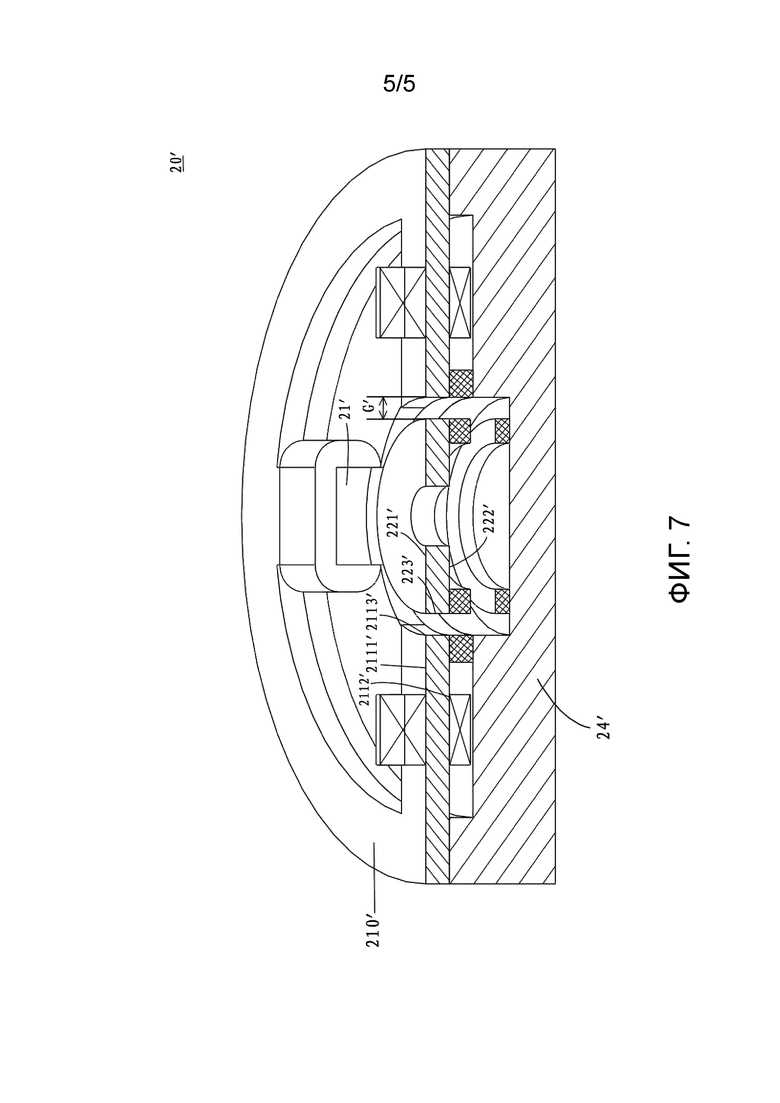
ФИГ. 7 - вид в разрезе подшипника на магнитной подвеске с механизмом для увеличения жесткости по ФИГ. 6;
На чертежах соответствующие ссылочные позиции обозначают соответствующие компоненты. Примеры, представленные в настоящем описании, используются для пояснения иллюстративных аспектов настоящего изобретения, при этом данные примеры никоим образом не следует толковать как ограничивающие объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение будет описано ниже со ссылкой на чертежи, на которых показан ряд вариантов осуществления настоящего изобретения. Однако следует понимать, что настоящее изобретение может быть реализовано множеством различных способов, и оно не ограничено вариантами осуществления, описанными ниже. В действительности нижеописанные варианты осуществления направлены на более полное раскрытие настоящего изобретения и адекватное пояснения объема настоящего изобретения специалисту в данной области техники. Следует также понимать, что варианты осуществления, раскрытые в настоящем описании, могут объединяться различными способами, чтобы создать множество дополнительных вариантов осуществления.
В целях описания термины "верхний", "нижний", "левый", "правый", "вертикальный", "горизонтальный", "верх", "низ", "поперечный", "перпендикулярный" и их производные относятся к ориентации на чертежах настоящего изобретения. Однако следует понимать, что в настоящем изобретении могут быть использованы различные альтернативные модификации, если явно не указано иное.
Неопределенный артикль “a/an” и определенный артикль “the” в контексте настоящего описания, если четко не указано иное, могут использоваться для объектов во множественном числе. Выражения “содержащий”, “имеющий в своем составе” и “включающий в себя”, используемые в описании, указывают на наличие заявленных признаков, но не исключают наличия одного или более дополнительных признаков. Союз “и/или” в контексте настоящего описания включает в себя все возможные сочетания перечисленных релевантных объектов.
В описании, когда элемент упоминается как расположенный “на”, “прикрепленный” к, “присоединенный” к, “соединенный” с, “контактирующий” с другим элементом и т.д., он может непосредственно располагаться на, быть прикрепленным к, присоединенным к, соединенным с или контактирующим с другим элементом, либо могут также присутствовать промежуточные элементы. Наоборот, когда элемент упоминается как расположенный “непосредственно на”, “непосредственно прикрепленный” к, “непосредственно присоединенный” к, “непосредственно соединенный” с или “непосредственно контактирующий” с другим элементом, промежуточные элементы отсутствуют. В описании ссылки на элемент, расположенный “смежно” с другим элементом, предполагают, что могут существовать участки, которые перекрывают, лежат сверху или лежат снизу смежного элемента.
На ФИГ. 2 и 3 показан подшипник 20 на магнитной подвеске согласно одному варианту осуществления настоящего изобретения. Подшипник 20 на магнитной подвеске включает в себя статор 21 и ротор 22, расположенный в статоре. Ротор 22 может иметь форму диска и способен осуществлять вращение вокруг оси вращения A. В идеале статор 21 и ротор 22 соосны между собой. Статор 21 включает в себя кольцевое тело 210 статора и множество зубцов 211 статора, расположенных на теле 210 статора в окружном направлении. Зубцы 211 статора и ротор 22 выполнены из магнитопроводящих материалов, например ферромагнитных материалов. В варианте осуществления, показанном на ФИГ. 2 и 3, зубец 211 статора включает в себя вертикальный участок и горизонтальный участок, перпендикулярные друг другу, чтобы принимать форму перевернутой буквы «L». Горизонтальный участок зубца 211 статора и ротор 22 могут иметь одинаковую толщину и могут располагаться на одинаковой высоте в идеальном случае, при этом между горизонтальным участком зубца 211 статора и ротором 22 имеется зазор или воздушный зазор G. Говоря более конкретно, горизонтальный участок зубца 211 статора включает в себя верхнюю поверхность 2111, нижнюю поверхность 2112 и дугообразную внутреннюю периферийную поверхность 2113; ротор 22 включает в себя верхнюю поверхность 221, нижнюю поверхность 222 и окружную наружную периферийную поверхность 223. В идеале верхние поверхности 2111 горизонтальных участков зубцов 211 статора расположены вровень с верхней поверхностью 221 ротора 22, нижние поверхности 2112 горизонтальных участков зубцов 211 статора расположены вровень с нижней поверхностью 222 ротора 22, а внутренние периферийные поверхности 2113 горизонтальных участков зубцов 211 статора разнесены от наружной периферийной поверхности 223 ротора 22, образуя одинаковый зазор или воздушный зазор G. Кроме того, на вертикальных участках зубцов 211 статора навиты катушки 212 магнитной подвески, чтобы создать для ротора 22 радиальную электромагнитную силу (силу притяжения или силу отталкивания), чтобы подвесить ротор 22. Говоря более конкретно, будучи возбужденными током, катушки 212 магнитной подвески могут генерировать электромагнитное поле на зубцах 211 статора. Благодаря проникновению магнитного поля через зубцы 211 статора и ротор 22 между зубцами 211 статора и ротором 22 может генерироваться радиальная электромагнитная сила (сила притяжения или сила отталкивания) для подвешивания ротора 22 в радиальной плоскости (плоскости X-Y на ФИГ. 2 и 3).
В варианте осуществления, показанном на ФИГ. 2 и 3, статор 21 содержит четыре зубца 211 статора, каждый из которых снабжен катушкой 212 магнитной подвески. Четыре зубца 211 статора равномерно распределены в окружном направлении, а значит, могут быть разбиты на две пары зубцов статора, при этом два зубца статора в каждой паре зубцов статора расположены противоположно друг другу в радиальном направлении. Например, одна пара зубцов 211 статора может располагаться противоположно вдоль X-оси, а другая пара зубцов 211 статора может располагаться противоположно вдоль Y-оси. При необходимости может быть предусмотрено большее количество пар зубцов статора (например, три или четыре пары зубцов статора), не отступая от настоящего изобретения.
В соответствии с конкретными условиями катушки 212 магнитной подвески на каждой паре зубцов 211 статора могут генерировать электромагнитные силы на роторе 22 в одинаковых направлениях или в противоположных направлениях. Например, в идеальном случае устойчивого подвешивания ротора катушки 212 магнитной подвески на каждой паре зубцов 211 статора могут генерировать на роторе 22 электромагнитные силы в противоположных направлениях, чтобы ротор 22 мог быть устойчиво подвешен в радиальной плоскости без радиального смещения вдоль X-оси или Y-ось. В некоторых случаях, например, когда ротор 22 радиально смещается от центрального сбалансированного положения вследствие вибрации подшипника 20 на магнитной подвеске под действием внешних сил, чтобы позволить ротору 22 быстрее вернуться в центральное сбалансированное положение, катушки 212 магнитной подвески на каждой паре зубцов 211 статора могут генерировать электромагнитные силы на роторе 22 в одном направлении, при этом направление равнодействующей этих электромагнитных сил противоположно направлению радиального смещения ротора, что помогает ротору 22 быстро вернуться в центральное сбалансированное положение. В данном случае величина и/или направление электромагнитных сил, генерируемых соответствующими одной или более катушками 212 магнитной подвески, могут изменяться путем регулирования по отдельности величины и/или направления тока, протекающего через упомянутые катушки 212 магнитной подвески, так чтобы ротор 22 мог перемещаться противоположно в радиальном направлении благодаря создаваемому т.н. «эффекту push-pull», чтобы быстро вернуться в центральное сбалансированное положение, где он может быть устойчиво подвешен. В варианте осуществления, показанном на ФИГ. 2 и 3, катушки 212 магнитной подвески на одной паре зубцов 211 статора могут управлять смещением ротора 22 вдоль X-оси, а катушки 212 магнитной подвески на другой паре зубцов 211 статора могут управлять смещением ротора 22 вдоль Y-оси, что позволяет регулировать положение ротора 22 относительно статора 21 в радиальной плоскости.
Вышеуказанное регулирование выполняется посредством датчика смещения и контроллера. Датчик смещения используется для обнаружения смещения ротора 22 относительно статора 21 и отправки сигнала в контроллер. Контроллер соединен с катушками 212 магнитной подвески посредством проводов. После приема сигнала от датчика смещения контроллер по отдельности должным образом изменяет величину и/или направление тока, протекающего через соответствующие одну или более катушек 212 магнитной подвески, чтобы изменить величину и направление равнодействующей радиальных сил, генерируемых между статором 21 и ротором 22, так чтобы ротор мог переместиться в требуемом направлении для достижения регулировки положения ротора 22 относительно статора 21 в радиальной плоскости.
Как описано выше, хотя катушки 212 магнитной подвески, расположенные попарно, могут подвешивать ротор 22 в радиальной плоскости, при этом положение ротора 22 относительно статора 21 в радиальной плоскости может регулироваться с использованием контроллера для изменения величины и направления тока, протекающего через катушку 212 магнитной подвески (т.е. степень свободы перемещения ротора 22 вдоль X-оси и Y-ось поддается контролю), степень свободы для совершения кручения ротора 22 не может эффективно контролироваться только этими катушками 212 магнитной подвески (т.е. вращение ротора 22 вокруг X-оси и Y-оси не может эффективно контролироваться).
Чтобы решить проблему, касающуюся крутильной жесткости подшипника на магнитной подвеске, и максимально уменьшить объем ротора, особенно высоту ротора, связанную со вспомогательным путем прохождения потока, в настоящем изобретении предложено техническое решение, заключающееся в добавлении механизма 23 для увеличения жесткости (показанного пунктирной рамкой на ФИГ. 3) к подшипнику на магнитной подвеске. Механизм 23 для увеличения жесткости не только существенно увеличивает крутильную жесткость ротора подшипника на магнитной подвеске (т.е. обеспечивает более редкое проявление крутильного перемещения ротора), но также устраняет недостатки конструкций предшествующего уровня техники, например сэндвичевой конструкции, а также существенно уменьшает объем ротора подшипника на магнитной подвеске и высоту ротора, связанную со вспомогательным путем прохождения потока.
Конкретная конструкция и принцип действия механизма 23 для увеличения жесткости по настоящему изобретению будет подробно описан со ссылкой на ФИГ. 3-5, где на ФИГ. 3 показана схема расположения механизма 23 для увеличения жесткости по настоящему изобретению в подшипнике на магнитной подвеске на виде в разрезе, на ФИГ. 4 более ясно показана конкретная конструкция механизма 23 для увеличения жесткости по настоящему изобретению на частичном виде в перспективе, где также показаны направления намагничивания компонентов механизма 23 для увеличения жесткости на схематичном виде, а на ФИГ. 5 показан другой вариант осуществления осевого приводного блока 233 механизма 23 для увеличения жесткости.
Обратимся сначала к ФИГ. 3 и 4, где механизм 23 для увеличения жесткости по настоящему изобретению включает в себя: постоянный магнит 231 ротора, расположенный на стороне ротора 22, при этом постоянный магнит ротора параллелен главной плоскости P ротора 22 и примыкает к ротору 22, при этом главная плоскость P ротора представляет собой плоскость симметрии ротора 22 в радиальном направлении; постоянный магнит 232 статора, расположенный на стороне зубца 211 статора 21, при этом постоянный магнит статора параллелен главной плоскости P ротора 22 и примыкает к зубцу 211 статора 21, при этом сторона, на которой расположен постоянный магнит 232 статора, является той же стороной, что и сторона, на которой расположен постоянный магнит 231 ротора, при этом постоянный магнит 232 статора и постоянный магнит 231 ротора разнесены друг от друга на определенное расстояние в радиальном направлении (на зубцах статора в форме перевернутой буквы "L", показанных на ФИГ. 3 и 4, постоянный магнит 232 статора расположен под горизонтальным участком зубца 211 статора, при этом постоянный магнит статора параллелен главной плоскости P ротора и примыкает к горизонтальному участку зубца 211 статора); а также осевой приводной блок 233, выполненный с возможностью быть обращенным к постоянному магниту 231 ротора и быть разнесенным от постоянного магнита 231 ротора на определенное расстояние H в аксиальном направлении (в варианте осуществления, показанном на ФИГ. 3 и 4, осевой приводной блок 233 также параллелен главной плоскости P ротора). В механизме для увеличения жесткости по настоящему изобретению постоянный магнит 231 ротора и ротор 22 образуют роторный узел, который имеет асимметричную конструкцию относительно главной плоскости P ротора 22. Кроме того, механизм для увеличения жесткости по настоящему изобретению выполнен так, что постоянный магнит 232 статора генерирует радиальную силу притяжения для постоянного магнита 231 ротора, а осевой приводной блок 233 генерирует осевую силу отталкивания для постоянного магнита 231 ротора, при этом величина осевой силы отталкивания может изменяться с изменением осевого расстояния между осевым приводным блоком 233 и постоянным магнитом 231 ротора. Крутильная жесткость ротора 22 увеличивается посредством совместного действия радиальной силы притяжения и осевой силы отталкивания, конкретный принцип которого подробно описан ниже.
В варианте осуществления, показанном на ФИГ. 3 и 4, постоянный магнит 231 ротора и постоянный магнит 232 статора представляют собой цельную конструкцию круглой формы, и оба имеют прямоугольное сечение. Постоянный магнит 231 ротора может примыкать к нижней поверхности 222 ротора 22, при этом наружная периферийная поверхность 2311 постоянного магнита 231 ротора может располагаться вровень с наружной периферийной поверхностью 223 ротора 22. Постоянный магнит 232 статора может примыкать к нижней поверхности 2112 горизонтального участка зубца 211 статора, при этом внутренняя периферийная поверхность 2321 постоянного магнита 232 статора может располагаться вровень с внутренней периферийной поверхностью 2113 горизонтального участка зубца 211 статора. Таким образом, постоянный магнит 231 ротора и постоянный магнит 232 статора разнесены друг от друга на расстояние, равное расстоянию G между статором 21 и ротором 22. Однако настоящее изобретение этим не ограничивается, и расстояние, на которое постоянный магнит 231 ротора и постоянный магнит 232 статора разнесены друг от друга, может также отличаться от расстояния G, на которое разнесены статор 21 и ротор 22. Кроме того, постоянный магнит 231 ротора и постоянный магнит 232 статора могут иметь одинаковую толщину. Однако настоящее изобретение этим не ограничивается, и постоянный магнит 231 ротора и постоянный магнит 232 статора могут также иметь разную толщину.
Постоянный магнит 231 ротора может крепиться к нижней поверхности 222 ротора 22 различными пригодными способами. Как упоминалось выше, роторный узел, образованный постоянным магнитом 231 ротора и ротором 22, имеет асимметричную конструкцию относительно главной плоскости P ротора 22 (т.е. постоянный магнит 231 ротора расположен только с одной стороны главной плоскости P ротора 22), что является важным отличием от сэндвичевой конструкции предшествующего уровня техники. Постоянные магниты в конструкции предшествующего уровня техники, такой как сэндвичевая конструкция, обычно имеют симметричное расположение относительно ротора, что неизбежно требует расположения, по меньшей мере, двух постоянных магнитов на обеих сторонах ротора. Вследствие краевого эффекта намагниченности постоянного магнита, как упоминалось выше, напряженность магнитного поля, создаваемая двумя отдельными постоянными магнитами, меньше напряженности магнитного поля, создаваемой единственным постоянным магнитом того же объема. Таким образом, если два постоянных магнита расположены раздельно, то для того, чтобы достичь требуемой напряженности магнитного поля, такой как создается единственным постоянным магнитом, высоту или объем этих двух постоянных магнитов требуется увеличить, что идет в разрез с современным господствующим стремлением к миниатюризации подшипника на магнитной подвеске. Постоянный магнит 231 ротора по настоящему изобретению расположен на одной стороне ротора 22, при этом асимметричная конструкция, образованная таким способом, не только может достичь выполнения той же функции, которая выполняется симметричной конструкцией, но также может уменьшить объем ротора и высоту ротора, связанную со вспомогательным путем прохождения потока, посредством использования постоянного магнита ротора малого объема и малой высоты. Когда такой подшипник на магнитной подвеске применяется, например, в насосе для крови, он может существенно уменьшить повреждения, причиняемые, например, клеточным элементам крови, что повышает совместимость с кровью.
Осевой приводной блок 233 расположен непосредственно под постоянным магнитом 231 ротора в аксиальном направлении. Предпочтительно осевой приводной блок 233 может располагаться непосредственно под постоянным магнитом 231 ротора стационарным образом. По сравнению с подвижным расположением осевого приводного блока 233 стационарное расположение осевого приводного блока может до некоторой степени уменьшить вредные эффекты, вызванные несоосностью осевого приводного блока 233 с постоянными магнитами 231 ротора вследствие перемещения осевого приводного блока. Однако настоящее изобретение этим не ограничивается. Осевой приводной блок 233 может также иметь определенную степень свободы, например, он также может вращаться вокруг оси вращения A.
В одном варианте осуществления по настоящему изобретению осевой приводной блок 233 может быть выполнен в виде кольцеобразного постоянного магнита (как показано на ФИГ. 3-4). Осевой приводной блок 233 в виде кольцеобразного постоянного магнита может иметь ту же ширину, что и постоянный магнит 231 ротора, и может полностью совпадать по ширине с постоянным магнитом 231 ротора. Однако настоящее изобретение этим не ограничивается, и осевой приводной блок 233 в виде кольцеобразного постоянного магнита может также иметь ширину, отличную от ширины постоянного магнита 231 ротора. Осевой приводной блок 233 в виде кольцеобразного постоянного магнита образует в пространстве магнитное поле, отталкивающее постоянный магнит 231 ротора, тем самым генерируя пассивную осевую силу отталкивания (т.е. силу подачи вверх) для постоянного магнита 231 ротора. С одной стороны, когда роторный узел, образованный постоянным магнитом 231 ротора и ротором 22, горизонтально подвешен в радиальной плоскости, не совершая крутильного перемещения вокруг X-оси или Y-оси, пассивная осевая сила отталкивания стремится протолкнуть роторный узел вверх; при этом роторный узел испытывает действие радиальной силы притяжения, генерируемой катушкой 212 магнитной подвески на статоре 21 и постоянным магнитом 232 статора, сама же радиальная сила притяжения имеет силовую составляющую, тянущую вниз, чтобы противодействовать пассивной осевой силе отталкивания, генерируемой осевым приводным блоком 233, так что роторный узел удерживается в требуемом положении в пространстве и может избежать соударения с нижней частью подшипника на магнитной подвеске. С другой стороны, когда роторный узел совершает наклон в радиальной плоскости, а значит, совершает крутильное перемещение вокруг X-оси или Y-оси, один конец постоянного магнита 231 ротора будет перемещаться от осевого приводного блока 233, в процессе чего пассивная осевая сила отталкивания, генерируемая осевым приводным блоком 233 для этого конца постоянного магнита 231 ротора, будет уменьшаться, а другой конец постоянного магнита 231 ротора будет приближаться к осевому приводному блоку 233, в процессе чего пассивная осевая сила отталкивания, генерируемая осевым приводным блоком 233 для этого конца постоянного магнита 231 ротора, будет увеличиваться. Поскольку пассивные осевые силы отталкивания, прикладываемые осевым приводным блоком 233 к двум концам постоянного магнита 231 ротора, не равны между собой, на постоянном магните 231 ротора создается эффективный крутящий момент вокруг X-оси или Y-оси. Этот эффективный крутящий момент противоположен направлению кручения роторного узла, тем самым препятствуя кручению роторного узла и возвращая роторный узел в радиальную плоскость. Другими словами, в ходе того, что разные участки роторного узла перемещаются вверх и вниз вследствие крутильного перемещения роторного узла, осевой приводной блок 233 генерирует пассивные осевые силы отталкивания разной величины в соответствии с расстоянием от разных участков роторного узла. Эти пассивные осевые силы отталкивания различной величины создают на постоянном магните 231 ротора и роторном узле эффективный крутящий момент, препятствующий кручению роторного узла. Этот эффективный крутящий момент совместно с радиальной силой притяжения, генерируемой статором, воздействует на роторный узел, заставляя роторный узел вернуться в радиальную плоскость и оставаться в ней устойчиво подвешенным. Это увеличивает крутильную жесткость роторного узла в целом, т.е. создает эффект увеличения жесткости. Следует отметить, что данный процесс регулировки механизма 23 для увеличения жесткости представляет собой процесс динамической балансировки.
В другом варианте осуществления по настоящему изобретению осевой приводной блок может быть выполнен в виде электромагнита или катушки 233’ с воздушным сердечником (как показано на ФИГ. 5). В варианте осуществления, в котором в качестве осевого приводного блока используется электромагнит или катушка 233’ с воздушным сердечником, осевой приводной блок может включать в себя множество электромагнитов или катушек с воздушным сердечником (на ФИГ. 5 показан только один электромагнит или катушка с воздушным сердечником), предпочтительно множество электромагнитов или катушек с воздушным сердечником, разбитых по парам. Эти электромагниты или катушки с воздушным сердечником могут располагаться непосредственно под постоянным магнитом 231 ротора на некотором расстоянии, предпочтительно на одинаковом расстоянии, друга от друга в окружном направлении. Осевой приводной блок в виде электромагнита или катушки 233’ с воздушным сердечником поддается активному управлению, т.е. величина и направление тока, протекающего через каждый электромагнит или катушку с воздушным сердечником, могут по отдельности изменяться контроллером или контуром управления. Таким образом, при необходимости контроллер или контур управления может использоваться для изменения величины и направления тока, протекающего через любые соответствующие один или более электромагнитов или одну или более катушек с воздушным сердечником, чтобы изменить величину или характер электромагнитной силы, генерируемой соответствующими одним или более электромагнитами или одной или более катушками с воздушным сердечником (т.е. способной изменить величину осевой силы отталкивания, генерируемой осевым приводным блоком, и способной заменить изначальную осевую силу отталкивания, генерируемую осевым приводным блоком, на осевую силу притяжения), тем самым увеличивая крутильную жесткость роторного узла.
Говоря более конкретно, когда в роторном узле, образованном постоянными магнитами 231 ротора и ротором 22, один конец расположен вблизи осевого приводного блока, а его противоположный конец расположен вдали от осевого приводного блока вследствие крутильного перемещения (т.е. поворота вокруг X-оси или Y-оси), величина и/или направление тока, протекающего через электромагниты или катушки с воздушным сердечником, соответствующие этим двум концам, могут изменяться, так что соответствующие электромагниты или катушки с воздушным сердечником совместно создают эффективный крутящий момент, противодействующий кручению роторного узла, чтобы вернуть роторный узел в радиальную плоскость. В частности, имеется возможность изменить только величину тока, протекающего через электромагниты или катушки с воздушным сердечником, соответствующие этим двум концам, например, увеличить ток, протекающий через электромагнит или катушку с воздушным сердечником, находящуюся вблизи роторного узла, чтобы создать большее распорное усилие для роторного узла, и при этом уменьшить ток, протекающий через электромагнит или катушку с воздушным сердечником, находящуюся вдали от роторного узла, чтобы создать меньшее распорное усилие для роторного узла, тем самым создавая больший эффективный крутящий момент на роторном узле, чтобы быстро вернуть роторный узел в радиальную плоскость. Имеется также возможность изменить только направление тока, протекающего через электромагнит или катушку с воздушным сердечником, соответствующую одному из этих двух концов, например, чтобы сохранить неизменным направление тока, протекающего через электромагнит или катушку с воздушным сердечником, находящуюся вблизи роторного узла, так чтобы аксиальная сила отталкивания (распорная сила) продолжала генерироваться для роторного узла, а также изменить направление тока, протекающего через электромагнит или катушку с воздушным сердечником, находящуюся вдали от роторного узла, так чтобы генерировалась осевая сила притяжения для роторного узла. Путем обеспечения отталкивания на одном конце и притяжения на другом конце таким способом, на роторном узле создается больший эффективный крутящий момент, чтобы позволить роторному узлу быстро вернуться в радиальную плоскость. Имеется также возможность объединить предыдущие два способа регулирования путем одновременного изменения величины и направления тока, протекающего через электромагниты или катушки с воздушным сердечником, соответствующие этим двум концам, чтобы получить больший эффективный крутящий момент, так чтобы роторный узел мог вернуться в радиальную плоскость быстрее.
По сравнению с использованием постоянных магнитов в качестве осевого приводного блока применение электромагнитов или катушек 233' с воздушным сердечником в качестве осевого приводного блока может увеличить крутильную жесткость роторного узла более существенно и позволить подвесить роторный узел более устойчиво. Однако в случае использования электромагнита или катушки с воздушным сердечником в качестве осевого приводного блока электромагнит или катушка с воздушным сердечником потребует большого объема и сложного контура управления. Таким образом, если требуется миниатюризировать целиком подшипник на магнитной подвеске, в качестве осевого приводного блока лучше использовать постоянные магниты; однако если требуется миниатюризировать только сам ротор (например, подшипник на магнитной подвеске выполнен в виде компонента, помещаемого вне тела человека), лучше использовать активно управляемый электромагнит или катушку с воздушным сердечником.
На ФИГ. 4 и 5 также показаны направления намагничивания постоянного магнита 231 ротора и постоянного магнита 232 статора, где изображено мононаправление намагниченности. Говоря более конкретно, постоянный магнит 231 ротора и постоянный магнит 232 статора, показанные на ФИГ. 4 и 5, имеют единственное направление аксиальной намагниченности. Однако настоящее изобретение этим не ограничивается. При условии, что между постоянным магнитом 231 ротора и постоянным магнитом 232 статора может генерироваться радиальная сила притяжения, которая требуется в настоящем изобретении, постоянный магнит 231 ротора и постоянный магнит 232 статора могут иметь любые другие формы мононаправлений намагниченности (например, радиальную намагниченность или другие подходящие формы мононаправлений намагниченности), при этом постоянный магнит 231 ротора и постоянный магнит 232 статора могут иметь мононаправления намагниченности в разных направлениях намагничивания (например, постоянный магнит 231 ротора имеет аксиальное направление намагниченности, в то время как постоянный магнит 232 статора имеет радиальное направление намагниченности и т.д.). Кроме того, постоянный магнит 231 ротора и постоянный магнит 232 статора могут также иметь неединственные направления намагниченности, например, направления намагниченности сужающейся формы (tapered magnetization directions) либо другие известные или неизвестные неединственные направления намагниченности, при условии, что между постоянным магнитом 231 ротора и постоянным магнитом 232 статора может генерироваться радиальная сила притяжения.
Возвращаясь к ФИГ. 3, подшипник 20 на магнитной подвеске дополнительно включает в себя опорную конструкцию 24, которая может использоваться для поддержки осевого приводного блока 233 механизма 23 для увеличения жесткости. В варианте осуществления, показанном на ФИГ. 3, опорная конструкция 24 используется для поддержки статора 21, постоянного магнита 232 статора и осевого приводного блока 233 одновременно. В данном примере осуществления центральный участок опорной конструкции 24 включает в себя втулку, имеющую кольцевой фланец 241 и полость 242, окруженную кольцевым фланцем. Кольцевой фланец 241 используется для поддержки постоянного магнита 232 статора и упирания постоянного магнита 232 статора в нижнюю поверхность 2112 горизонтального участка зубцов 211 статора. Осевой приводной блок 233 помещен на дно полости 242 втулки. Предпочтительно осевой приводной блок 233 расположен на дне полости 242 втулки стационарным образом.
Опорная конструкция 24 может представлять собой часть статора 21. Однако настоящее изобретение этим не ограничивается. Опорная конструкция 24 может представлять собой часть корпуса подшипника 20 на магнитной подвеске либо часть других пригодных компонентов подшипника 20 на магнитной подвеске, например часть привода ротора (например, приводного двигателя) подшипника 20 на магнитной подвеске.
Обратимся далее к ФИГ. 6 и 7, которые соответственно представляют собой вид в перспективе и вид в разрезе подшипника 20’ на магнитной подвеске согласно другому варианту осуществления настоящего изобретения. Подшипник 20’ на магнитной подвеске, представленный на ФИГ. 6 и 7, имеет ту же конструкцию, что и подшипник 20 на магнитной подвеске, представленный на ФИГ. 2 и 3, с единственной разницей в зубцах статора и опорной конструкции. Таким образом, для простоты будут описаны только отличные детали, а одинаковые компоненты рассматриваться не будут.
В варианте осуществления, показанном на ФИГ. 6 и 7, статор 21' включает в себя кольцевое тело 210’ статора и четыре зубца 211’ статора линейной формы. Четыре зубца 211’ статора линейной формы равномерно разнесены вдоль окружного направления и продолжаются от тела 210' статора к центру статора в радиальном направлении. Каждый зубец 211’ статора линейной формы может иметь равномерную ширину (как показано на ФИГ. 6 и 7), но он также может иметь неравномерную ширину, например, зубец 211’ статора может иметь сужающуюся ширину и т.п.
Аналогичным образом ротор 22' может иметь форму диска, при этом между зубцами 211’ статора и ротором 22' имеется зазор или воздушный зазор G'. Зубцы 211’ статора и ротор 22' могут иметь одинаковую толщину и в идеале расположены на одной высоте. Другими словами, в идеале верхние поверхности 2111' зубцов 211’ статора расположены вровень с верхней поверхностью 221' ротора 22', нижние поверхности 2112' зубцов 211’ статора расположены вровень с нижней поверхностью 222' ротора 22', а внутренние периферийные поверхности 2113' зубцов 211 статора разнесены от наружной периферийной поверхности 223' ротора 22', образуя одинаковый зазор или воздушный зазор G'.
Механизм для увеличения жесткости подшипника 20’ на магнитной подвеске, показанного на ФИГ. 6 и 7, тот же по конструкции и схеме расположения, что и механизм для увеличения жесткости подшипника 20 на магнитной подвеске, показанного на ФИГ. 2 и 3, и здесь повторно описываться не будет. Подшипник 20’ на магнитной подвеске также включает в себя опорную конструкцию 24', которая также используется для поддержки статора, постоянного магнита статора и осевого приводного блока. В отличие от конструкции, показанной на ФИГ. 3, опорная конструкция 24', показанная на ФИГ. 7, имеет ступенчатую форму, высота которой постепенно уменьшается от наружной периферии к центру, тем самым образуя полость в центре. Самая наружная ступень опорной конструкции 24' используется для поддержки тела 210’ статора, промежуточная ступень используется для поддержки постоянных магнитов статора и упирания постоянного магнита статора в нижнюю поверхность 2112' зубцов 211’ статора, а осевой приводной блок расположен на дне полости в центре опорной конструкции 24'.
Аналогичным образом опорная конструкция 24' может представлять собой часть статора 21'. Однако настоящее изобретение этим не ограничивается. Опорная конструкция 24' может также быть частью корпуса подшипника 20’ на магнитной подвеске или частью других пригодных компонентов подшипника 20’ на магнитной подвеске, например, частью привода ротора (например, приводного двигателя) подшипника 20’ на магнитной подвеске.
Хотя примеры осуществления настоящего изобретения были описаны выше со ссылкой на ФИГ. 1-7, специалисты в данной области техники поймут, что настоящее изобретение не ограничено конкретной конструкцией, которая была раскрыта. В примеры осуществления может быть внесено множество изменений и модификаций без существенного отступления от существа и объема настоящего изобретения. Таким образом, все эти изменения и модификации включены в объем правовой защиты настоящего изобретения, определяемой формулой изобретения.
Например, направления намагниченности постоянного магнита ротора, постоянного магнита статора и осевого приводного блока, показанные на ФИГ. 4, приведены лишь в качестве примера. Любые направления намагниченности постоянного магнита, способные генерировать радиальную силу притяжения между ротором и статором и осевую силу отталкивания между ротором и осевым приводным блоком, соответствуют принципу, заложенному в настоящем изобретении.
В качестве другого примера в подшипниках на магнитной подвеске, показанных на ФИГ. 2-3 и 6-7, постоянный магнит ротора, постоянный магнит статора и осевой приводной блок, выполненный в виде постоянного магнита, представлены в виде цельной конструкции круглой формы. Однако настоящее изобретение этим не ограничивается. Постоянный магнит ротора, постоянный магнит статора и осевой приводной блок могут состоять из множества отдельных постоянных магнитов, разнесенных в окружном направлении, при условии, что может быть достигнут требуемый эффект увеличения жесткости. Множество отдельных постоянных магнитов могут иметь дугообразную форму. Использование множества разнесенных отдельных постоянных магнитов, например, может до некоторой степени уменьшить общую массу постоянных магнитов, что является преимуществом в областях применения, где к общей массе предъявляются более жесткие требования. Однако когда множество разнесенных отдельных постоянные магниты используются в качестве постоянного магнита ротора, постоянного магнита статора или осевого приводного блока, в окружном направлении может генерироваться неравномерная магнитная сила вследствие нарушения непрерывности отдельных постоянных магнитов в окружном направлении. Это может вызвать вибрацию ротора, а значит, до некоторой степени снизить устойчивость подвески ротора.
В качестве другого примера в подшипниках на магнитной подвеске, показанных на ФИГ. 2-3 и 6-7, опорная конструкция одновременно поддерживает статор, постоянный магнит статора и осевой приводной блок. Однако настоящее изобретение этим не ограничивается. Опорная конструкция главным образом используется для поддержки осевого приводного блока, а статор и постоянный магнит статора могут поддерживаться другими подходящими компонентами. Кроме того, в подшипниках на магнитной подвеске, показанных на ФИГ. 2-3 и 6-7, опорная конструкция представлена в виде цельной конструкции. Однако настоящее изобретение этим не ограничивается, и опорная конструкция может быть собрана из множества компонентов.
Настоящее изобретение определяется прилагаемой формулой изобретения, при этом эквиваленты этой формулы изобретения также включены в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| МАГНИТНЫЙ ПОДШИПНИК | 2002 |
|
RU2237201C2 |
| Магнитный подшипник | 2019 |
|
RU2724913C1 |
| КОМБИНИРОВАННЫЙ СВЕРХПРОВОДЯЩИЙ МАГНИТНЫЙ ПОДВЕС ДЛЯ КИНЕТИЧЕСКОГО НАКОПИТЕЛЯ ЭНЕРГИИ | 2015 |
|
RU2610880C1 |
| БЕСКОНТАКТНЫЙ МАГНИТНЫЙ ЭЛЕКТРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2012 |
|
RU2510117C2 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ИСПОЛЬЗОВАНИЕМ СИЛ ЛОРЕНЦА (ВАРИАНТЫ) | 2016 |
|
RU2636629C1 |
| ПОДШИПНИК НА МАГНИТНОЙ ПОДВЕСКЕ | 2006 |
|
RU2314443C1 |
| Электрический мотор с аксиальным магнитным потоком | 2023 |
|
RU2810539C1 |
| РОТОРНАЯ СИСТЕМА МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2475926C1 |

Изобретение относится к механизму (23) для увеличения жесткости для подшипника (20) на магнитной подвеске, подшипнику (20) на магнитной подвеске, включающему в себя механизм (23) для увеличения жесткости, и насосу для крови. Подшипник (20) на магнитной подвеске содержит статор (21), имеющий зубцы (211) статора, и ротор (22), расположенный в статоре (21). Механизм (23) для увеличения жесткости содержит: постоянный магнит (231) ротора, постоянный магнит (232) статора, а также осевой приводной блок (233). Постоянный магнит (231) ротора и ротор (22) подшипника (20) на магнитной подвеске образуют роторный узел, который имеет асимметричную конструкцию относительно главной плоскости (P) ротора (22). Механизм (23) для увеличения жесткости выполнен так, что постоянный магнит (232) статора генерирует радиальную силу притяжения для постоянного магнита (231) ротора, а осевой приводной блок (233) генерирует осевую силу отталкивания для постоянного магнита (231) ротора, при этом величина осевой силы отталкивания изменяется с изменением осевого расстояния между осевым приводным блоком (233) и постоянным магнитом (231) ротора. Механизм (23) для увеличения жесткости может увеличить крутильную жесткость ротора подшипника (20) на магнитной подвеске и способствует миниатюризации подшипника (20) на магнитной подвеске. 3 н. и 16 з.п. ф-лы, 7 ил. 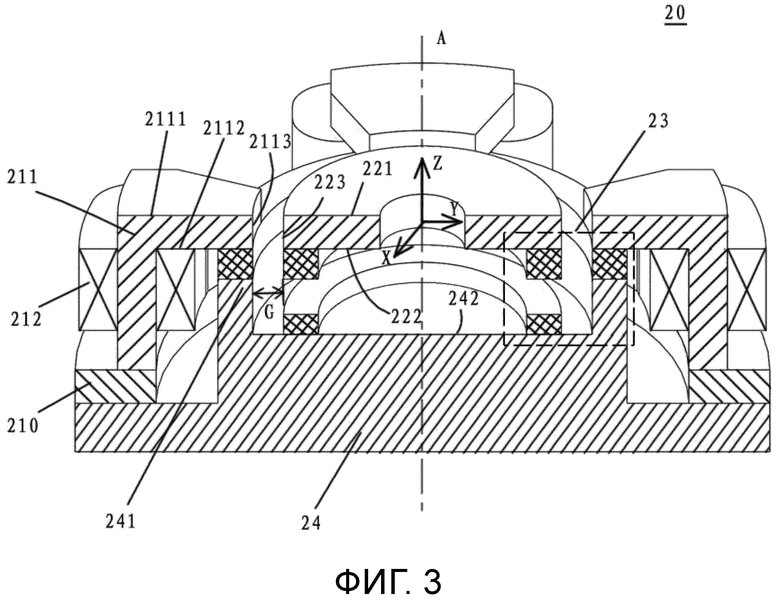
1. Механизм для увеличения жесткости для подшипника на магнитной подвеске, причем подшипник на магнитной подвеске включает в себя статор и ротор, расположенный в статоре, при этом статор включает в себя множество зубцов статора, разнесенных друг от друга в окружном направлении, при этом каждый из зубцов статора снабжен катушкой магнитной подвески для подвешивания ротора подшипника на магнитной подвеске и управления перемещением ротора в радиальном направлении, и при этом механизм для увеличения жесткости содержит:
постоянный магнит ротора, расположенный на стороне ротора, при этом постоянный магнит ротора параллелен главной плоскости ротора и примыкает к ротору, при этом главная плоскость ротора представляет собой плоскость симметрии ротора в радиальном направлении;
постоянный магнит статора, расположенный на стороне зубцов статора, при этом постоянный магнит статора параллелен главной плоскости ротора и примыкает к зубцам статора, при этом сторона, на которой расположен постоянный магнит статора, является той же стороной, что и сторона, на которой расположен постоянный магнит ротора, при этом постоянный магнит статора разнесен от постоянного магнита ротора на определенное расстояние в радиальном направлении; а также
осевой приводной блок, выполненный с возможностью быть обращенным к постоянному магниту ротора и быть разнесенным от постоянного магнита ротора на определенное расстояние в аксиальном направлении;
при этом постоянный магнит ротора и ротор образуют роторный узел, при этом роторный узел имеет асимметричную конструкцию относительно главной плоскости ротора;
при этом механизм для увеличения жесткости выполнен так, что постоянный магнит статора генерирует радиальную силу притяжения для постоянного магнита ротора, а осевой приводной блок генерирует осевую силу отталкивания для постоянного магнита ротора, при этом величина осевой силы отталкивания изменяется с изменением осевого расстояния между осевым приводным блоком и постоянным магнитом ротора.
2. Механизм для увеличения жесткости по п.1, в котором постоянный магнит ротора имеет единственное направление намагниченности, которое представляет собой аксиальное направление намагниченности или радиальное направление намагниченности, и/или постоянный магнит статора имеет единственное направление намагниченности, которое представляет собой аксиальное направление намагниченности или радиальное направление намагниченности.
3. Механизм для увеличения жесткости по п.1, в котором постоянный магнит ротора представляет собой цельную конструкцию круглой формы или состоит из множества отдельных постоянных магнитов, разнесенных друг от друга в окружном направлении, и/или постоянный магнит статора представляет собой цельную конструкцию круглой формы или состоит из множества отдельных постоянных магнитов, разнесенных друг от друга в окружном направлении.
4. Механизм для увеличения жесткости по п.1, в котором осевой приводной блок выполнен с возможностью стационарной установки.
5. Механизм для увеличения жесткости по п.1, в котором осевой приводной блок представляет собой постоянный магнит, имеющий цельную конструкцию круглой формы; либо осевой приводной блок состоит из множества отдельных постоянных магнитов, разнесенных друг от друга в окружном направлении.
6. Механизм для увеличения жесткости по п.1, в котором осевой приводной блок представляет собой электромагнит или катушку с воздушным сердечником.
7. Механизм для увеличения жесткости по п.6, в котором осевой приводной блок состоит из множества электромагнитов или катушек с воздушным сердечником, разнесенных друг от друга в окружном направлении.
8. Механизм для увеличения жесткости по п.7, при этом механизм для увеличения жесткости дополнительно включает в себя контроллер или контур управления, способный по отдельности изменять величину тока, протекающего через каждый электромагнит или каждую катушку с воздушным сердечником, чтобы по отдельности изменять величину осевой силы отталкивания, генерируемой соответствующими одним или более электромагнитами или одной или более катушками с воздушным сердечником для постоянного магнита ротора.
9. Механизм для увеличения жесткости по п.8, в котором, когда возникает крутильное перемещение ротора относительно радиального направления, контроллер или контур управления механизма для увеличения жесткости уменьшает ток, протекающий через один или более электромагнитов или одну или более катушек с воздушным сердечником, соответствующих концу ротора, расположенному вдали от осевого приводного блока, и в то же время увеличивает ток, протекающий через один или более электромагнитов или одну или более катушек с воздушным сердечником, соответствующих другому концу ротора, расположенному вблизи осевого приводного блока.
10. Механизм для увеличения жесткости по п.8, в котором контроллер или контур управления механизма для увеличения жесткости также способен по отдельности изменять направление тока, протекающего через каждый электромагнит или каждую катушку с воздушным сердечником, при этом, когда возникает крутильное перемещение ротора относительно радиального направления, контроллер или контур управления механизма для увеличения жесткости изменяет направление тока, протекающего через один или более электромагнитов или одну или более катушек с воздушным сердечником, соответствующих концу ротора, расположенному вдали от осевого приводного блока, чтобы заменить осевую силу отталкивания, генерируемую одним или более электромагнитами или одной или более катушками с воздушным сердечником для постоянного магнита ротора, на осевую силу притяжения.
11. Подшипник на магнитной подвеске, содержащий статор, имеющий множество зубцов статора, ротор, расположенный в статоре, и механизм для увеличения жесткости по п.1.
12. Подшипник на магнитной подвеске по п.11, в котором каждый из зубцов статора включает в себя горизонтальный участок и вертикальный участок, чтобы принять форму перевернутой буквы «L», при этом горизонтальный участок каждого зубца статора и ротор расположены по существу на одной высоте, при этом между горизонтальным участком статора и ротором имеется зазор, при этом катушка магнитной подвески навита на вертикальный участок зубца статора, при этом магнитный поток, генерируемый катушкой магнитной подвески, способен проходить через горизонтальный участок зубца статора, через зазор между горизонтальным участком статора и ротором, а также через ротор; или
каждый из зубцов статора продолжается от тела статора к центру в радиальном направлении, чтобы принять линейную форму, при этом каждый зубец статора и ротор расположены по существу на одной высоте, при этом между зубцом статора и ротором имеется зазор, при этом катушка магнитной подвески навита на зубец статора, при этом магнитный поток, генерируемый катушкой магнитной подвески, способен проходить через зубец статора, через зазор между зубцом статора и ротором, а также через ротор.
13. Подшипник на магнитной подвеске по п.11, дополнительно содержащий датчик смещения и контроллер, при этом датчик смещения используется для измерения смещения ротора в радиальном направлении и отправки сигнала смещения в контроллер подшипника на магнитной подвеске, при этом контроллер подшипника на магнитной подвеске используется, чтобы по отдельности изменять величину и/или направление тока, протекающего через соответствующие одну или более катушек магнитной подвески, на основе сигнала смещения, чтобы тем самым управлять перемещением ротора в радиальном направлении.
14. Подшипник на магнитной подвеске по п.11, в котором постоянный магнит статора механизма для увеличения жесткости примыкает к поверхности статора.
15. Подшипник на магнитной подвеске по п.11, дополнительно содержащий опорную конструкцию для поддержки осевого приводного блока механизма для увеличения жесткости и/или для упирания постоянного магнита статора механизма для увеличения жесткости в поверхность статора;
при этом опорная конструкция является частью, по меньшей мере, статора подшипника на магнитной подвеске, привода ротора подшипника на магнитной подвеске или корпуса подшипника на магнитной подвеске.
16. Подшипник на магнитной подвеске по п.11, в котором ротор подшипника на магнитной подвеске имеет форму диска; и/или
внутренняя периферийная поверхность постоянного магнита статора расположена вровень с внутренней периферийной поверхностью зубца статора подшипника на магнитной подвеске; и/или
наружная периферийная поверхность постоянного магнита ротора расположена вровень с наружной периферийной поверхностью ротора подшипника на магнитной подвеске.
17. Подшипник на магнитной подвеске по п.11, в котором зубцы статора и/или ротор выполнены из магнитопроводящих материалов.
18. Подшипник на магнитной подвеске по п.17, в котором зубцы статора и/или ротор выполнены из ферромагнитных материалов.
19. Насос для крови, содержащий подшипник на магнитной подвеске по п.11.
| US 2002074881 A1, 20.06.2002 | |||
| CN 102247628 A, 23.11.2011 | |||
| Автосъем, например, для лентосоединительных и т.п. машин | 1960 |
|
SU135378A1 |
| Способ приготовления мелассного сусла при производстве спирта и хлебопекарных дрожжей | 1989 |
|
SU1687606A1 |

