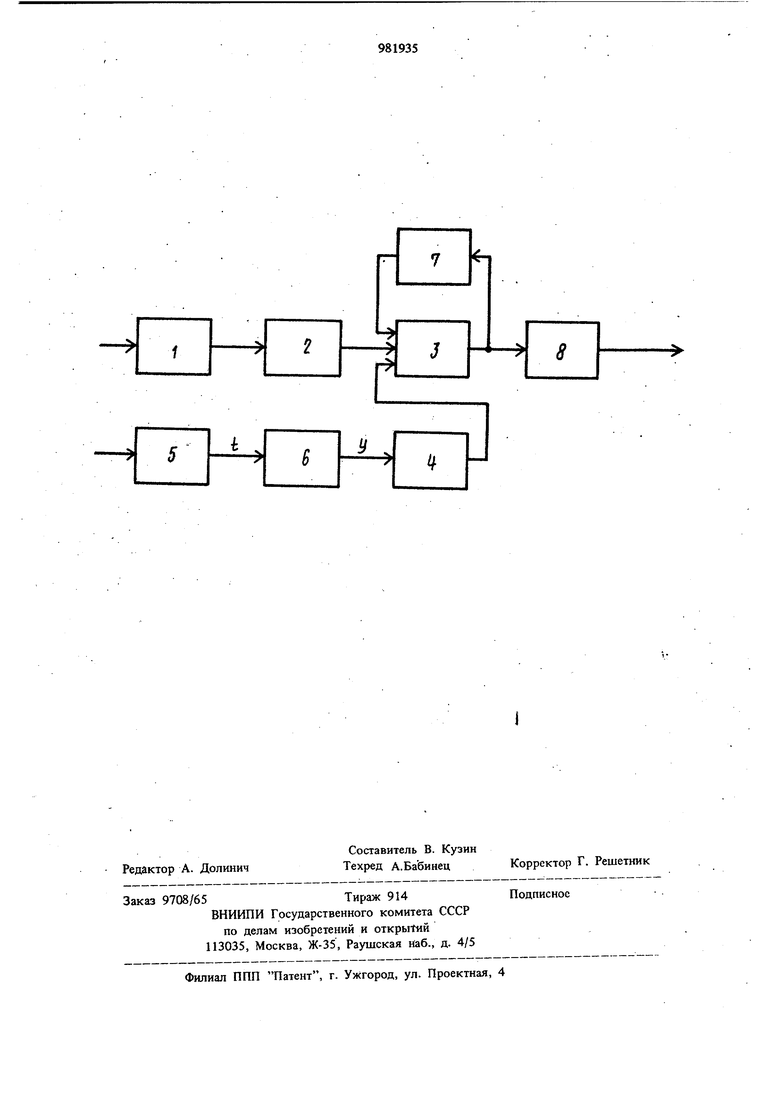
Изобретение относится к автоматике и мо жет быть использовано в системах управления судовыми силовыми установками, параметры которых меняются в процессе функционирования в широких диапазонах. Известны адаптивные системы, предназначенные для управления нестационарными объектами и содержащие пропорционально-интегрально- дифференциальный (ПИД) регулятор с блоком самонастройки весовых коэффициентов регулятора 1. К недостаткам этих систем следует отнести то, что они не учитывают специфики судовых силовых установок. Наиболее близкой по технической сущности к предлагаемой является система регулирования числа .оборотов фирмы Woodward, содержащая последовательно соединенные датчик оборо тов, преобразователь, линейный ПИД-регулятор и исполнительный механизм, датчик температур выхлопных газов, задатчик оборотов, выход которого соединен со вторь1М входом линейног ПИД-регулятора 2. Недостатками этой известной системы являются отсутствие учета нестационарности параметров силовых судовых установок, низкое быстродействие, невозможность стабилизации двигателя на всех режимах работы, приводящее к большому потребляемому расходу топлива и сокращающее моторесурс работы двигателя. Цель изобретения - повыщение экономичности и качества регулирования. Поставленная цель достигается тем, что в системе управления, содержащей датчик температуры выхлопных газов, задатчик оборотов, последовательно соединенные датчик оборотов, преобразователь, линейный пропорционально-интегрально-дифференциальный регулятор и исполнительный механизм, выход датчика оборотов соединен со вторым входом линейного пропорционально- интегрально-дифференциального регулятора, содержатся блок коррекции и блок самонастройки, подключенный входом и выходом соответственно к выходу и третьему входу линейного пропорционально-интегрально- дифференциального регулятора, выход датчика тем398псратурьт выхлопных газов через блок коррекции соединен со входом задатчика оборотов. На чертеже показана принципиальная схема адаптивной системы управления судовыми силовыми установками. Схема содержит оборотов 1, преобразователь 2, пропорционально-интегральнодифференциальный регулятор 3, задагчик оборотов 4, датчик температуры выхлопных газов 5, блок коррекции 6, блок саманастройки 7, исполнительный мехаш1зм 8. Система работает следующим образом. При работе двигателя датвдк оборотов 1 преобразует обороты вала в частоту следования сформированных импульсов, которые преобразо вателем 2 преобразуются в аналоговый электри ческш сигнал х (t). Далее сигнал поступает на вход ПИД-регулятора 3, на второй вход которого подается сигнал g(t) с заддтчика обо ротов 4. Величина задающего сигнала S ном- г где п - постоянная величина, равная требуемому числу оборотов, при температуре выхлоп ,, (TQ- настроеч1шй козффи ных газов циент), при t .$ т. y(t) K(t-Te, )при t 7 TQ сигнал с блока коррекции 6, К - настроечный козффивдеет. Информация о t имеется на выходе датгика температуры выхлопных газов 5. На основе сигналов g(t) и x(t) реализован закон управления в регуляторе 3 вида U(,t) KplE (t) + к (t),( гдееО) g(t) x(t), (4 KQ, Кц, Кд - весовые коэффициенты. Их значения формируются в блоке самонастройки 7 на основе выходного сигнала U регулятора 3 (это позволяет использовать зависи мость между U и нагруженностью двигателя) следующим образом К const,Кл. const(5) с +ciif TIJ, + (f и(6). где с, ai, Т - настроечные коэффициенты. Сигнал с регулятора 3 поступает на вход исполнительного механизма 8, выходной сигнал которого является выходным сигналом системы управления. Таким образом, в предлагаемой адаптивной системе управления судовыми силовыми установками осуществляется регулирювание, близкое к оптимальному, независимо от режима работы. За счет зтого достигается повышение экономичности и качества регулировгшия. Формула изобретения Адаптивная система управления судовыми силовыми установками, содержащая датчик температуры выхлопных газов, задатчик оборотов, последовательно соединенные датчик оборотов, преобразователь, линейный пропорционально- интегрально-дифференциальный регулятор к исполнительный механизм, выход задатчика оборотов соединен с вторым входом линейного пропорционально- интегрально-дифференциального регулятора, отличающаяся тем, что, с целью повыщения экономичности и качества регулирования, система содержит блок коррекции и блок самонастройки, подключеннный входом и выходом соответственно к выходу и третьему входу линейного пропорционально-Интегрально-дифференциального регулятора, выход датчика температуры выхлопных газов через блок коррекции соединен с входом задатчика оборотов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 717718, кл. G 05 В 13/02, 1980. 2.Регулятор числа оборотов конструкции УГ.8 с циферблатом. Проспект фирмы Woodward, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ КУСТА ГАЗОВЫХ СКВАЖИН | 2014 |
|
RU2559268C1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Система автоматического управления судовой турбиной | 1979 |
|
SU985329A1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОВЫМИ И ГАЗОКОНДЕНСАТНЫМИ СКВАЖИНАМИ | 2015 |
|
RU2591870C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОРЕЖИМНЫМ МНОГОТОПЛИВНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2612687C1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1157523A1 |