Изобретение относится к системам автоматического управления. Система предназначена для регулирования нестационарных объектов с запаздыванием, функционирующих в условиях высокого уровня неконтролируемых возмущений. Система может найти применение в химической, нефтехимической, металлургической и других отраслях промышленности.
Известен ряд адаптивных систем, решающих задачу высококачественного регулирования нестационарных объектов, функционирующих в условиях высокого уровня неконтролируемых возмущений, например системы с использованием эталонных моделей [1] - Солодовников В.В., Шрамко Л.С. Расчет и проектирование самонастраивающихся систем с эталонными моделями. М.: Машиностроение, 1972, с.35-37 и [2] - Громыко В.Д., Санковский Е.А. Самонастраивающиеся системы с моделью. М.: ЭНЕРГИЯ, 1974, с.17-22, а также системы с инверсной эталонной моделью [3] - Авторское свидетельство СССР №591821, кл. G05B 17/02, 1977, [4] - Авторское свидетельство СССР №824142, кл. G05B 17/02, 1979 и [5] - Авторское свидетельство СССР №1113781, кл. G05B 17/02, 1982.
Системы, описанные в [1], обладают более высокой точностью и приспосабливаемостью к изменениям параметров объекта по сравнению с обычными одноконтурными системами регулирования, при этом имеют достаточно простую структуру. Однако эти преимущества проявляются при больших значениях коэффициента передачи контура сигнальной самонастройки, а его увеличение ограничивается условием устойчивости, и особенно сильно это ограничение проявляется для объектов с запаздыванием. Системы, подобные описанной в [2], синтезированы на основе второго метода Ляпунова по условию устойчивости, когда берется определенно положительная, обычно достаточно простая, квадратичная функция фазовых координат, и на контур самонастройки накладываются такие условия, чтобы производная функции Ляпунова была отрицательной знакопостоянной. В результате, обеспечивается устойчивость контуров самонастройки, но при этом качество самонастройки может быть невысоким, поскольку выбор функции Ляпунова основан обычно на интуиции проектировщика, и эта функция представляет произвольную квадратичную форму. Поэтому система, построенная на выбранной функции Ляпунова, совершенно необязательно является наилучшей. Система с инверсной эталонной моделью [3] обладает двукратной инвариантностью до ε, имеет многократно более высокую точность по сравнению с обычными системами регулирования, но теряет устойчивость в случае, если модель не совпадает по структуре с объектом. Системы [4 и 5] лишены указанного недостатка, их устойчивость за счет включения в цепь сигнальной самонастройки корректирующего фильтра и выбора его структуры в соответствии с определенными условиями может быть обеспечена даже в случае отличия структуры модели и объекта.
Как известно, выражение для изображения по Лапласу выходного сигнала объекта системы [5], через параметры систем и входные воздействия имеет вид:

где Y(p) - изображение по Лапласу выходного сигнала объекта Y(t);
X(p) - изображение по Лапласу входного воздействия (сигнала задания) X(t);
G(p) - изображение по Лапласу неконтролируемого возмущения g(t);
Wo(p) -передаточная функция объекта, регулятора;
Wp(p) - передаточная функция регулятора;
WF(p) - передаточная функция корректирующего фильтра,
Wm -1(p) - передаточная функция идеальной инверсной (обратной) модели объекта;
e-pΔ - передаточная функция блока задержки.
Если модель объекта управления описывается передаточной функцией Wm(p), равной 
то передаточная функция идеальной инверсной модели объекта имеет вид

Однако такая передаточная функция физически не реализуема. Как было показано в [5], передаточную функцию реальной физически реализуемой инверсной модели можно представить в следующем виде:

Где Wmr -1(p) - передаточная функция реальной физически реализуемой инверсной модели объекта;
Wm -1(p) - передаточная функция идеальной инверсной модели объекта;
e-pΔ - передаточная функция блока временной задержки;
Δ - достаточно малое запаздывание, определяемое условиями физической реализуемости инверсной модели объекта.
Для удобства анализа предельных свойств системы положим, что модель адекватна объекту Wm(p)=Wo(p), тогда Wo(p)Wm -1(p)=1, кроме того, в этом случае можно положить для простоты WF(p)=1. Так как при Δ→0, e-pΔ→1 и (1-e-pΔ)→0, то, выбирая значение интервала задержки Δ достаточно малым, можно обеспечить выполнение условия

Тогда, с учетом принятых условий, после умножения числителя и знаменателя на Wm(p) и сокращения на Wo(p) выражение (1) принимает вид:

Как видно из выражения (6), передаточная функция системы по каналу управления близка к эталонной, и при ограниченном внешнем возмущении G(p) можно выбрать такое значение Δ, что будет выполняться условие:

где ε - любое малое, наперед заданное число. Т.е. система обладает инвариантностью до ε к внешним возмущениям. Однако для объектов с транспортным запаздыванием блок временной задержки будет включать в себя и величину транспортного запаздывания объекта -τO, и его передаточная функция будет иметь вид 

В результате подстановки p=jω и преобразования выражение (8) принимает вид:

Из (9) следует, что

Ограничение на время запаздывания, при соблюдении которого цепи компенсации неконтролируемых возмущений (цепи сигнальной самонастройки) эффективны, для частот в полосе пропускания объекта примет вид 
где ωс - частота среза объекта.
Таким образом, точность систем [4, 5] при наличии транспортного запаздывания в объекте регулирования очевидно существенно снижается.
Наиболее близкой к предлагаемой системе, выбранной в качестве прототипа, является система автоматического управления объектами с запаздыванием [6] - Авторское свидетельство СССР №591821, кл. G05B 17/02, 13/04, 1986, содержащая последовательно соединенные первый сумматор, регулятор, второй сумматор, объект регулирования, инверсную модель объекта управления, третий сумматор, блок прогнозирования с перестраиваемым интервалом прогноза и корректирующий блок, выход корректирующего блока инверсно соединен со вторым входом второго сумматора, первый вход первого сумматора соединен с выходом блока задатчика входного сигнала, его второй вход соединен инверсно с выходом объекта регулирования, второй вход третьего сумматора инверсно соединен с блоком временной задержки с перестраиваемым запаздыванием, вход которого соединен с выходом второго сумматора, выход третьего сумматора соединен с первым и вторым входом первого блока умножения, выход которого соединен с входом блока интегрирования на скользящем интервале времени, выход первого сумматора соединен с первым и вторым входом второго блока умножения, выход которого соединен с входом второго блока интегрирования на скользящем интервале времени, выход второго блока интегрирования на скользящем интервале времени соединен с первым входом блока деления, а выход первого блока интегрирования на скользящем интервале времени соединен со вторым входом блока деления, выход блока деления соединен с входом блока самонастройки, а выход блока самонастройки соединен с управляющим входом блока прогноза и управляющим входом блока временной задержки с перестраиваемым запаздыванием. На объект управления воздействует неконтролируемое возмущение, передаточная функция канала этого воздействия в общем случае неизвестна. На вход блока самонастройки поступает сигнал, численно равный отношению интегрально квадратичной оценки сигнала рассогласования между заданием (входным сигналом) и выходным сигналом объекта и интегрально квадратичной оценки неконтролируемого возмущения. Блок самонастройки формирует значение интервала прогноза, обеспечивающего минимизацию его входного сигнала. Таким образом, путем организации прогноза оценки неконтролируемого возмущения в системе, оптимизации интервала прогноза прогнозирующего блока достигается более высокая эффективность компенсации неконтролируемых возмущений и более высокая точность стабилизации выходного сигнала объекта регулирования.
Однако известная система обладает рядом недостатков.
1. Интегрально квадратичная оценка сигнала рассогласования между выходным сигналом объекта и заданием зависит от сигнала задания, изменяемого в системах управления промышленными объектами оперативным персоналом, либо в следящих системах - внешним по отношению к данной системе сигналом. Поэтому предлагаемая система будет нормально функционировать при постоянном значении сигнала задания, т.е. в режиме стабилизации фиксированного во времени значения выходного сигнала объекта. При изменении сигнала задания входной сигнал блока самонастройки будет определяться характером изменения сигнала задания и в меньшей степени внешними возмущениями, блок самонастройки в этих условиях будет вырабатывать ложные значения интервала прогноза, в результате система может потерять устойчивость.
2. Реализуемая в системе коррекция интервала задержки в блоке временной задержки на величину интервала прогноза будет нарушать синхронизацию выходного сигнала блока задержки и инверсной модели. Действительно, блок временной задержки предназначен для исключения управляющего воздействия из выходного сигнала инверсной модели, представляющей оценку суммы двух сигналов: управляющего воздействия, формируемого на выходе второго сумматора, и оценки неконтролируемого возмущения, приведенного к входу канала регулирования. Для того чтобы исключить влияние управляющего воздействия на оценку неконтролируемого возмущения, для его синхронизации с выходным сигналом инверсной модели объекта, интервал временной задержки блока задержки выбирается равным сумме временной задержки объекта регулирования и задержки в инверсной модели, обусловленной ее физической реализуемостью. Иными словами интервал временной задержки не зависит от интервала прогноза. Поэтому корректировка интервала задержки пропорционально интервалу прогноза ведет к нарушению синхронизации сигналов управления и выходного сигнала инверсной модели, что может привести к ухудшению точности регулирования и с увеличением интервала прогноза к нарушению устойчивости системы.
3. Используемый в системе алгоритм прогнозирования описывается простым выражением, близким к линеаризованной формуле Тейлора, что ограничивает точность прогноза и эффективность применения блока прогноза.
Технический результат от использования изобретения заключается в повышении точности регулирования и устойчивости системы.
Указанный результат достигается тем, что в адаптивную систему управления, содержащую первый задатчик входного сигнала, выход которого подключен к суммирующему входу первого сумматора, подключенного выходом к входу первого регулятора, выход первого регулятора подключен к суммирующему входу второго сумматора, объект управления, вход которого подключен к выходу второго сумматора, а выход объекта управления подключен к входу физически реализуемой инверсной модели объекта и к вычитающему входу первого сумматора, первый блок временной задержки, подключенный входом к выходу второго сумматора, а выход первого блока временной задержки подключен к вычитающему входу третьего сумматора, суммирующий вход которого подключен к выходу физически реализуемой инверсной модели объекта, блок прогнозирования с перестраиваемым интервалом прогноза, вход которого подключен к выходу третьего сумматора, введены корректирующий фильтр с перестраиваемой постоянной времени, первый и второй блоки ограничения и первый и второй формирователь сигналов уровней ограничения, первый, второй и третий блоки усреднения на скользящем интервале времени, первый, второй и третий блоки умножения, четвертый, пятый и шестой сумматоры, второй блок временной задержки с перестраиваемым запаздыванием, блок деления, второй, третий, четвертый и пятый задатчики сигналов, второй регулятор, причем первый вход корректирующего фильтра подключен к выходу прогнозирующего блока, выход корректирующего фильтра подключен к входу первого блока ограничения, выход которого подключен к вычитающему входу второго сумматора, второй и третий входы первого блока ограничения подключены к выходам первого формирователя сигналов уровней ограничения, вход первого блока усреднения на скользящем интервале времени подключен к выходу третьего сумматора, а выход первого блока усреднения на скользящем интервале времени подключен к вычитающему входу четвертого сумматора, суммирующий вход которого подключен к выходу третьего сумматора, вход второго блока временной задержки с перестраиваемым запаздыванием соединен с выходом четвертого сумматора, первый и второй входы первого блока умножения подключены к выходу четвертого сумматора, первый вход второго блока умножения подключен к выходу четвертого сумматора, а второй вход второго блока умножения соединен с выходом второго блока временной задержки с перестраиваемым запаздыванием, выход первого блока умножения соединен с входом второго блока усреднения на скользящем интервале времени, выход которого подключен к первому входу блока деления в качестве делителя, выход второго блока умножения соединен с входом третьего блока усреднения на скользящем интервале времени, выход которого подключен к второму входу блока деления в качестве делимого, выход блока деления подключен к суммирующему входу пятого сумматора, вычитающий вход пятого сумматора подключен к выходу второго задатчика, выход пятого сумматора подключен к первому информационному входу второго регулятора, второй параметрический вход второго регулятора подключен к третьему задатчику, выход второго регулятора подключен к первому входу второго блока ограничения, второй и третий входы второго блока ограничения подключены к выходам второго формирователя сигналов уровней ограничения, выход второго блока ограничения подключен к первому входу третьего блока умножения, к второму параметрическому входу второго блока временной задержки с перестраиваемым запаздыванием и к второму параметрическому входу блока прогноза, второй вход третьего блока умножения подключен к выходу четвертого задатчика, выход третьего блока умножения подключен к первому входу шестого сумматора, второй вход которого подключен к выходу пятого задатчика, выход шестого сумматора подключен к второму параметрическому входу корректирующего фильтра.
В адаптивной системе управления блок прогнозирования с перестраиваемым интервалом прогноза содержит последовательно соединенные сглаживающий фильтр, первый и второй дифференциаторы, первый усилитель, четвертый блок умножения, седьмой сумматор, а также второй усилитель, вход которого подключен к выходу первого дифференциатора, и пятый блок умножения, первый вход которого подключен к выходу второго усилителя, а выход - ко второму входу седьмого сумматора, к третьему входу седьмого сумматора подключен выход сглаживающего фильтра, вход сглаживающего фильтра подключен к выходу третьего сумматора, а вторые входы четвертого и пятого блоков умножения подключены к выходу второго регулятора.
Изобретение иллюстрируется следующими чертежами:
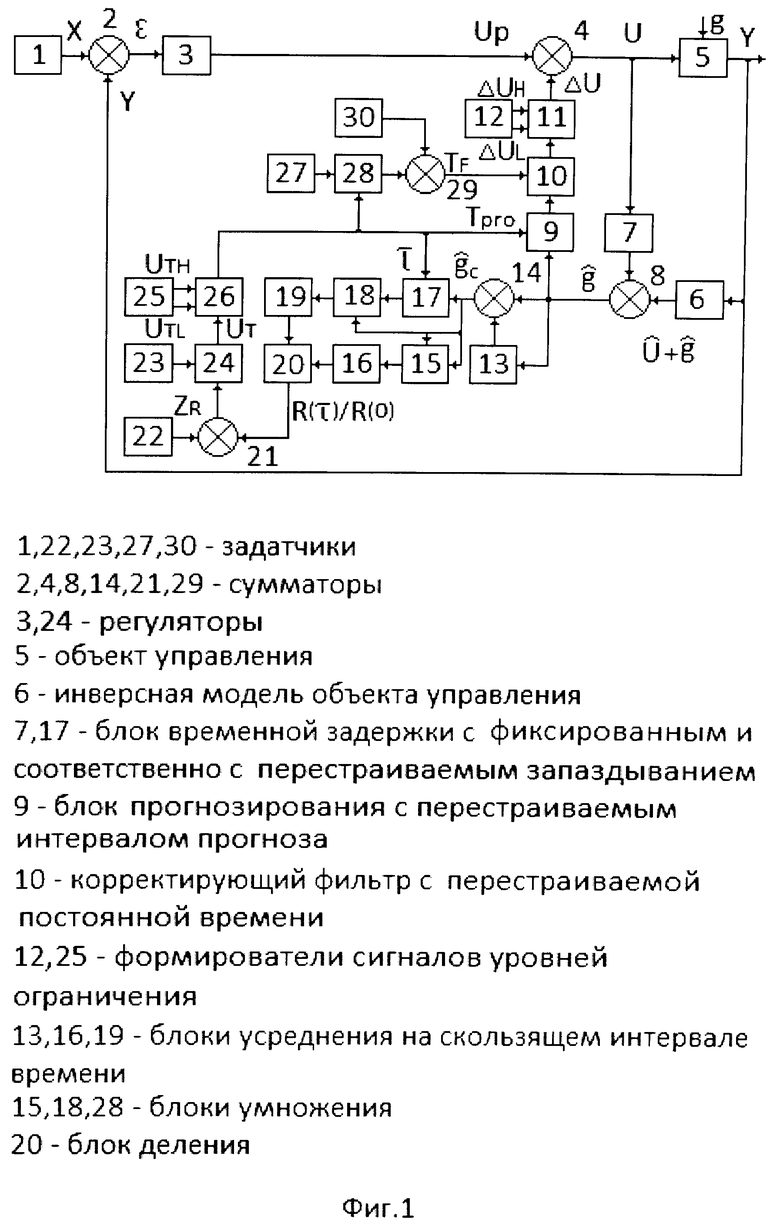
на Фиг.1 представлена структурная схема предлагаемой адаптивной системы управления.
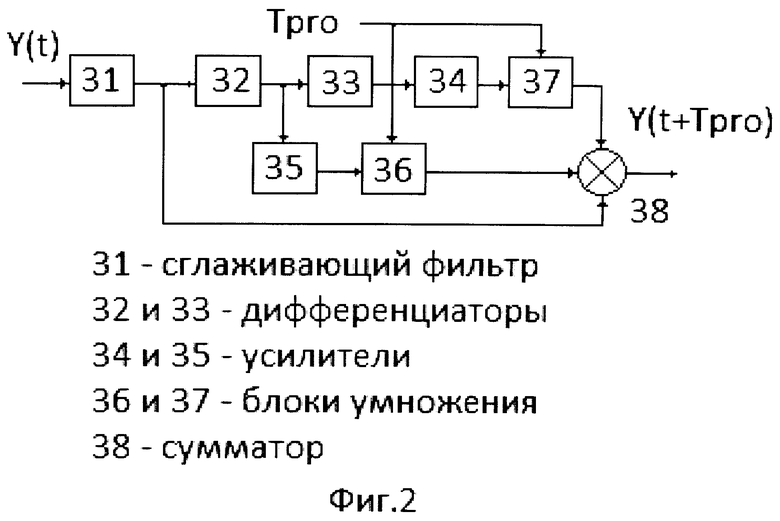
на Фиг.2 - структурная схема блока прогнозирования с перестраиваемым интервалом прогноза.
на Фиг.3 - структурная схема блоков усреднения на скользящем интервале времени.
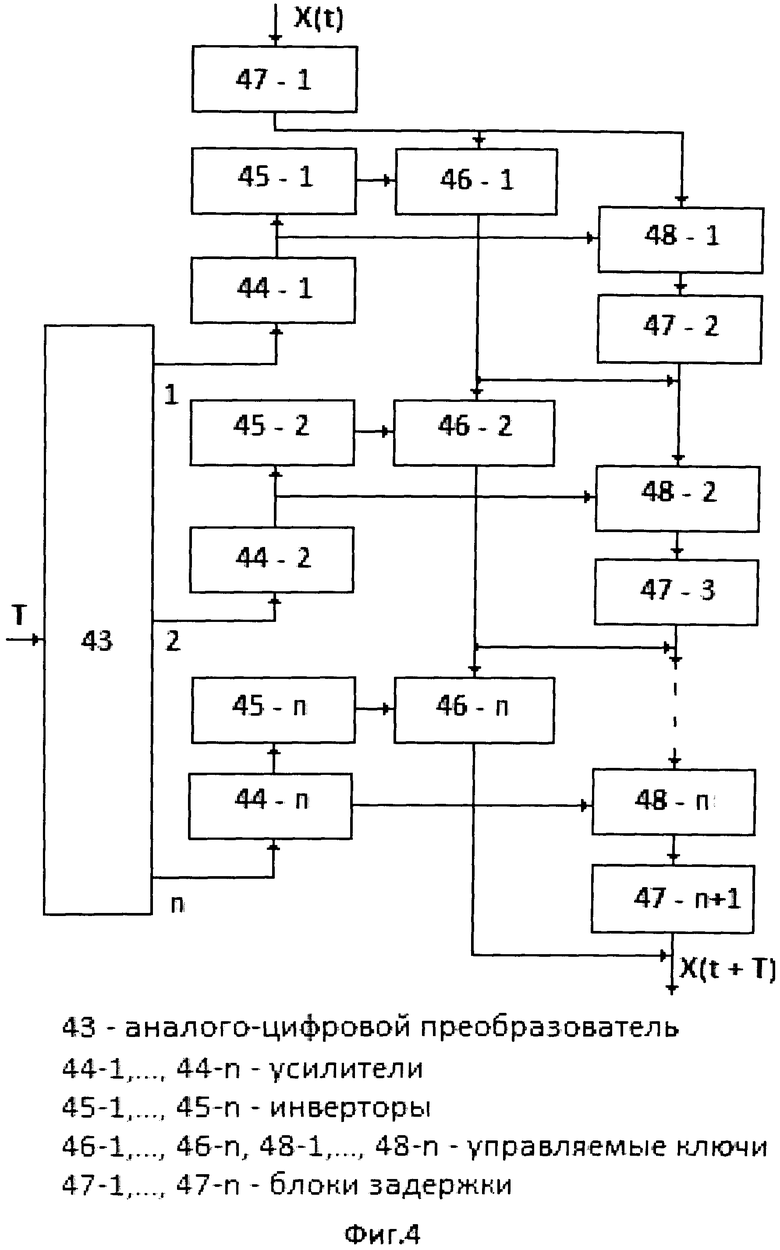
на Фиг.4 - структурная схема реализации блока временной задержки с перестраиваемым запаздыванием.
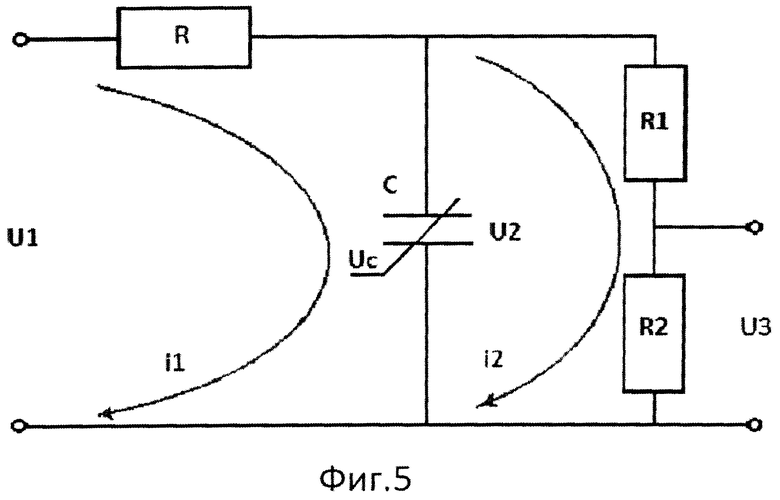
на Фиг.5 - структурная схема реализации корректирующего фильтра с перестраиваемой постоянной времени.
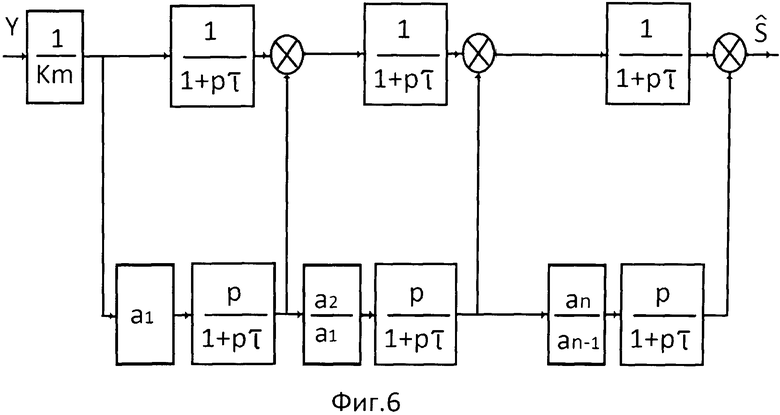
на Фиг.6 - схема реализации инверсной модели объекта управления.
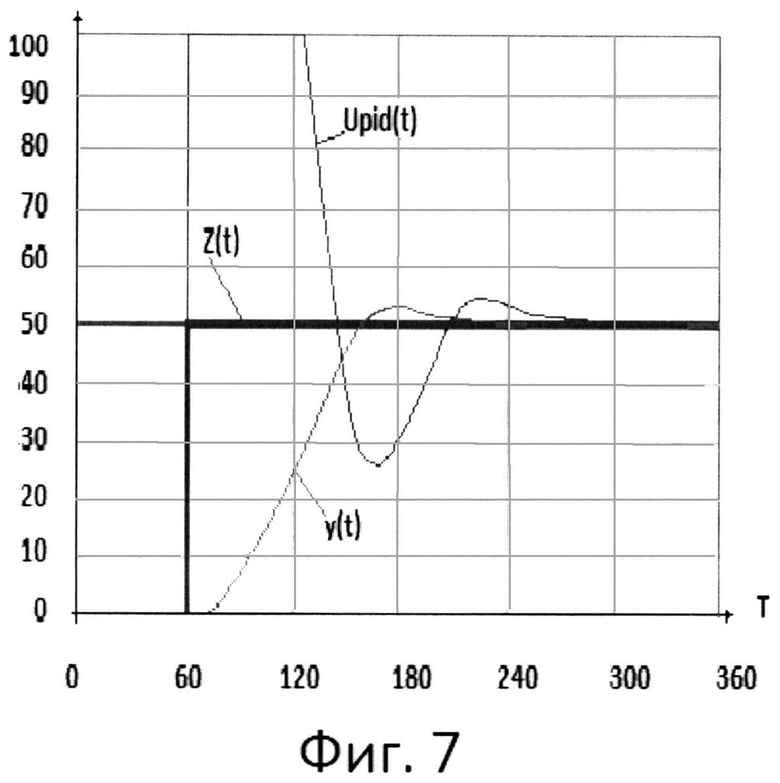
на Фиг.7 - иллюстрация качества переходных процессов оптимального ПИД регулятора.
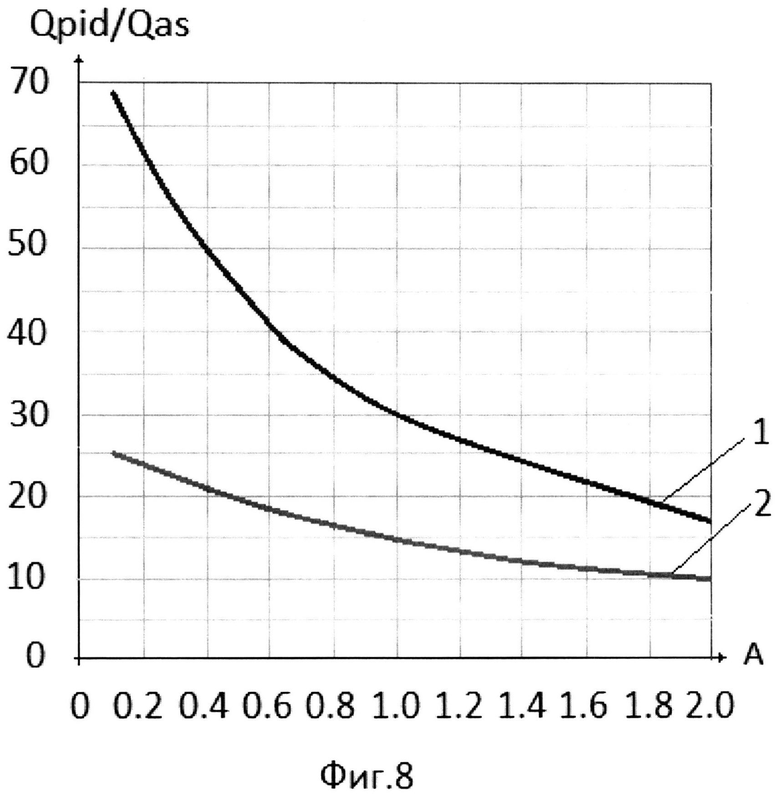
на Фиг.8 - иллюстрация зависимости точности регулирования предлагаемой адаптивной системы от соотношения постоянной времени корректирующего фильтра и интервала прогноза.
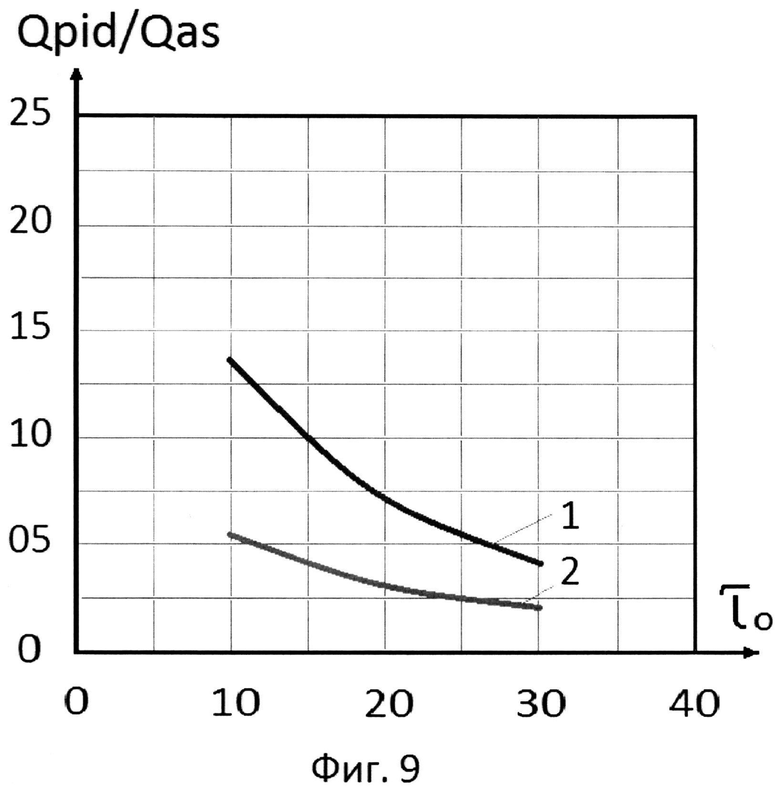
на Фиг.9 - иллюстрация зависимости точности регулирования предлагаемой адаптивной системы от величины транспортного запаздывания объекта.
Адаптивная система (Фиг.1) содержит задатчик входного сигнала - 1, первый сумматор - 2, первый регулятор - 3, второй сумматор - 4, объект регулирования с запаздыванием - 5, физически реализуемую инверсную динамическую модель объекта - 6, блок временной задержки - 7, третий сумматор - 8, блок прогнозирования с перестраиваемым интервалом прогноза - 9, корректирующий фильтр с перестраиваемой постоянной времени - 10, первый блок ограничения - 11, первый формирователь сигналов уровней ограничения - 12, первый блок усреднения на скользящем интервале времени - 13, четвертый сумматор - 14, первый блок умножения - 15, второй блок усреднения на скользящем интервале времени - 16, второй блок временной задержки с перестраиваемым интервалом задержки - 17, второй блок умножения - 18, третий блок усреднения на скользящем интервале времени - 19, блок деления - 20, пятый сумматор - 21, задатчик значения автокорреляционной функции оценки неконтролируемого возмущения - 22, второй регулятор - 24, задатчик начального значения интегральной части второго регулятора - 23, второй блок ограничения - 26, второй формирователь сигналов уровней ограничения - 25, третий блок умножения - 28, задатчик коэффициента пропорциональности между постоянной времени корректирующего фильтра TF и интервалом прогноза Tpro - 27, шестой сумматор - 29, задатчик минимально допустимого значения постоянной времени корректирующего фильтра - 30.
На фиг.1 приняты следующие обозначения:
X - сигнал задания;
Y - выходной сигнал объекта;
g - неконтролируемое возмущение;
ε - сигнал рассогласования между заданием X и выходным сигналом объекта Y;
Up - выходной сигнал первого регулятора 3;
U - полное управляющее воздействие;




TF - постоянная времени корректирующего фильтра;
ΔU - окончательное значение сигнала самонастройки;
ΔUH - сигнал ограничения максимального значения выходного сигнала блока 11 - сигнала самонастройки;
ΔUL - сигнал ограничения минимального значения выходного сигнала блока 11 - сигнала самонастройки;
R(τ) - скользящая оценка автокорреляционной функции сигнала 

R(0) - скользящая оценка автокорреляционной функции сигнала 
ZR - заданное значение отношения сигналов R(τ)/R(0);
UT - выходной сигнал регулятора 24;
UTH - сигнал ограничения максимального значения сигнала UT;
UTL - сигнал ограничения минимального значения сигнала UT;
τ - величина временного сдвига между значениями сигнала 
Tpro - интервал прогноза в цепи формирования сигнала самонастройки, соответствующий заданному значению отношения R(τ)/R(0).
Блок прогнозирования 9 (Фиг.2) включает последовательно соединенные сглаживающий фильтр 31, дифференциаторы 32 и 33, усилитель 34, блок умножения 37, сумматор 38, а также усилитель 35, вход которого подключен к выходу дифференциатора 32, и блок умножения 36, вход которого подключен к выходу усилителя 35, а выход - ко второму входу сумматора 38, к третьему входу сумматора 38 подключен выход сглаживающего фильтра 31. Алгоритм блока прогнозирования 9 описывается выражением, близким к формуле Тейлора, ограниченной тремя первыми членами:

где Y(t+Tpro) - выходной сигнал блока прогнозирования;

K1≤1 и K2≤0.25 - коэффициенты усиления усилителей 35 и 34 соответственно, в общем случае выбираются экспериментально;
Tpro - интервал прогноза.
Блоки усреднения на скользящем интервале времени 13, 16 и 19 (Фиг.3) включают последовательно соединенные блок временной задержки 39, сумматор 40, интегратор 41 и блок деления 42. Выходной сигнал блока усреднения на скользящем интервале времени (Фиг.3) описывается выражением:

где Y(t) - выходной сигнал блока усреднения на скользящем интервале времени;
X(t) - входной сигнал блока усреднения на скользящем интервале времени;
T - величина скользящего интервала времени.
Блок временной задержки 17 с перестраиваемым запаздыванием (Фиг.4) содержит аналого-цифровой преобразователь (АЦП) 43, усилители 44-1, … 44-n, инверторы 45-1, … 45-n, управляемые ключи 46-1, … 46-n, блоки задержки 47-1, … 47-n, управляемые ключи 48-1, … 48-n. Схема блока задержки с перестраиваемым запаздыванием работает следующим образом.
На вход АЦП поступает сигнал, численно равный величине интервала запаздывания T, этот сигнал преобразуется АЦП 43 в цифровой параллельный двоичный код. Сигналы с каждого из n разрядов через согласующие усилители 44-1, … 44-n поступают на управляемые ключи 48-1, … 48-n и через инверторы 45-1, … 45-n на ключи 46-1, … 46-n. Если i-й разряд АЦП равен логической единице, то он открывает 48-i-й ключ и закрывает 46-i-й ключ, пропуская входной сигнал блока задержки X(t) через соответствующий блок задержки, имеющий величину запаздывания, равную τ·2i, где τ=UHT/(2n-1), а UHT - максимально допустимое значение интервала прогноза (см. Фиг.1). Если i-й разряд АЦП равен логическому нулю, то он закрывает 48-i-й ключ и открывает 46-i-й ключ, в результате входной сигнал пропускается через 46-i-й ключ в обход соответствующего блока задержки. Таким образом, имея в составе блока задержки с перестраиваемым запаздыванием n блоков задержки с фиксированными интервалами задержки τ, τ·21, …, τ·2i, …, τ·2n, схема, представленная на фиг.2, позволяет варьировать величину интервала запаздывания в пределах от τ до τ·(2n+1-1).
Корректирующий фильтр с перестраиваемой постоянной времени 10 может быть выполнен в виде инерционного звена, схема которого представлена на Фиг.5. На схеме приняты следующие обозначения:
R, R1, R2 - электрические сопротивления;
C - емкость вариконда, изменяющаяся в зависимости от приложенного к нему управляющего напряжения Uc;
U1 - напряжение на входе фильтра;
U2 - напряжение на вариконде;
U3 - напряжение на выходе фильтра;
i1 - электрический ток, протекающий через сопротивление R и вариконд C;
i2 - электрический ток, протекающий через сопротивления R1 и R2.
Передаточная функция корректирующего фильтра имеет вид:

где  и
и 
Инверсная модель объекта управления 6, прямая модель которого описывается выражением (2), может быть реализована в виде схемы, изображенной на Фиг.6. Где входной сигнал схемы Y является выходным сигналом объекта управления, находящегося под воздействием суммы сигнала управления U и внешнего возмущения g, а выходной сигнал схемы 



Передаточная функция схемы, представленной на Фиг.6, будет иметь вид:


Передаточная функция (15) отличается от передаточной функции идеальной инверсной модели (3) наличием множителя 
Тогда выражение для физически реализуемой инверсной модели (15) преобразуется к виду, представленному формулой (3): Wmr -1(p)=Wm -1(p)·e-pΔ.
Предлагаемая адаптивная система управления предназначена для управления технологическими параметрами в химии, нефтехимии, металлургии и других отраслях промышленности, характеризующихся непрерывным характером производства. Системы управления такими процессами работают в основном в режиме стабилизации технологических параметров объектов регулирования в окрестности заданных значений, близких к оптимальным. Поэтому можно полагать, что действующие на объекты регулирования случайные возмущения близки к стационарным и подчиняются гипотезе эргодичности, когда величина среднего значения случайного сигнала по множеству равна соответствующему среднему по времени.
Адаптивная система (Фиг.1) работает следующим образом.
С задатчика 1 сигнал задания - X(t) поступает на первый вход сумматора 2, на второй вход которого инверсно подается выходной сигнал объекта регулирования 5 - Y(t), на выходе первого сумматора получается сигнал рассогласования ε между заданием X и выходным сигналом объекта Y. Сигнал рассогласования ε преобразуется регулятором 2 в управляющее воздействие UP, которое подается на первый вход сумматора 4, на вычитающий вход которого поступает сигнал самонастройки ΔU, являющийся итоговой оценкой неконтролируемого возмущения g. На выходе сумматора 4 получается полное управляющее воздействие U, которое подается на объект 5. На объект также поступает и неконтролируемое возмущение g. Итоговая оценка неконтролируемого возмущения ΔU получается в системе следующим образом. На выходе физически реализуемой инверсной (обратной) модели 6, на вход которой поступает выходной сигнал объекта Y, получается оценка суммарного входного воздействия объекта, приведенного к входу канала управления. Выходной сигнал инверсной модели равен по величине сумме оценки полного управляющего воздействия 














Как известно, автокорреляционная функция определяет зависимость случайной величины в последующий момент времени x(t1) от предшествующего значения x(t) в момент времени t. Это есть мера связи между ними. Очевидно, что при совпадении моментов времени t1=t, автокорреляционная функция принимает максимальное значение. Величина отношения R(τ)/R(0) фактически является оценкой нормированной меры связи, с максимальным значением, равным единице.
При прогнозировании случайного сигнала, каковым является оценка неконтролируемого возмущения 




Так как при возрастании интервала прогноза увеличиваются высокочастотные ошибки в оценке прогнозируемого неконтролируемого возмущения, для их уменьшения в системе предусмотрена организация автоматического формирования постоянной времени фильтра 10 - TF с помощью блоков 27-30. С этой целью выходной сигнал блока 26 подается на первый вход третьего блока умножения 28, на второй вход которого поступает сигнал с задатчика 27, равный заданному коэффициенту пропорциональности между постоянной времени корректирующего фильтра TF и интервалом прогноза Tpro. Выходной сигнал блока умножения 28 поступает на первый вход шестого сумматора 29, на второй вход которого подается сигнал с задатчика 30, равный минимально допустимому значению постоянной времени корректирующего фильтра 10. В результате на выходе шестого сумматора 29 получается сигнал, численно равный постоянной времени корректирующего фильтра 10, который поступает на параметрический вход фильтра 10. Таким образом, автоматическое изменение постоянной времени TF корректирующего фильтра 10 пропорционально изменениям интервала прогноза Tpro, позволяет при возрастании Tpro автоматически сгладить высокочастотные составляющие оценки прогноза неконтролируемого возмущения, уменьшить колебательность переходных процессов в системе и повысить устойчивость системы. В результате, в предлагаемой системе устранены отмеченные ранее недостатки системы [6]: работа цепи самонастройки не зависит от изменения задания по основному контуру регулирования, автоматически подстраиваясь под изменения статистических свойств случайных неконтролируемых возмущений, выходные сигналы блока временной задержки 7 и инверсной модели 6 синхронизированы во времени, и работа блока прогнозирования 10 синхронизацию не нарушает, наконец, становится возможным использовать более сложный и эффективный алгоритм прогноза оценки неконтролируемого возмущения (см. (18)) и увеличивать интервал прогноза, с сохранением приемлемой точности прогноза, поскольку с изменением интервала прогноза в системе автоматически настраивается постоянная времени корректирующего фильтра, обеспечивая тем самым более высокую точность и устойчивость системы.
Таким образом, введением в цепь компенсации неконтролируемого возмущения новых контуров автоматической настройки интервала прогноза прогнозирующего блока 9 и постоянной времени корректирующего фильтра 10 и применением более сложной структуры самого блока прогноза 10 достигается цель изобретения - более высокая эффективность компенсации неконтролируемых возмущений, следовательно, более высокая точность и обеспечивается более высокая устойчивость системы.
Для иллюстрации достигнутой цели ниже приведены результаты цифрового моделирования предлагаемой системы в сравнении с аналогом [5] и прототипом [6]. В качестве эталона использовался интегрально квадратичный критерий регулирования системы на базе оптимального ПИД регулятора. Рассматривался объект управления, описываемый инерционным звеном второго порядка с транспортным запаздыванием, передаточная функция которого имеет вид:

Где Ko=1, T10=35, T2o=75, τO=10
Передаточная функция ПИД регулятора 
Фиг.7, на которой отображена реакция оптимального ПИД регулятора на скачкообразное изменение задания, иллюстрирует качество настройки параметров ПИД регулятора. На Фиг.7 приняты обозначения:
Z(t) - задание регулятору;
Upid - управляющее воздействие (выходной сигнал ПИД регулятора);
y(t) - выходной сигнал объекта (регулируемый параметр).
На Фиг.8 представлены результаты сравнения точности регулирования предлагаемой адаптивной системы управления и наиболее близкого аналога [5] (система прототип [6] в данных условиях теряет устойчивость) для объекта, находящегося под воздействием случайного не измеряемого экспоненциально коррелированного возмущения с частотным спектром в полосе пропускания объекта и одновременно под воздействием ступенчатого возмущения. Параметры модели принимались равными параметрам объекта, заданное значение отношения сигналов R(τ)/R(0) принималось равным ZR=0.95, в результате интервал прогноза стабилизировался в окрестности Tpro≈10±2, постоянная времени корректирующего фильтра Tf поддерживалась пропорциональной интервалу прогноза Tf=A·Tpro+1, коэффициент усиления корректирующего фильтра принимался равным Kf=1. На Фиг.8 Qpid - интегрально-квадратичный критерий регулирования системы на базе оптимального ПИД регулятора, Qas - интегрально-квадратичный критерий регулирования предлагаемой адаптивной системы управления.
Кривая 1 иллюстрирует зависимость отношения Qpid/Qas от параметра A (фактически от постоянной времени фильтра) при полностью функционирующей структуре системы, с реализацией прогноза в цепи сигнальной самонастройки, а кривая 2 - при подаче на параметрический вход блока прогноза, вместо формируемого на выходе второго регулятора интервала прогноза, нулевого сигнала, т.е. фактически без прогноза. Как следует из результатов, представленных на Фиг.8, эффективность предлагаемой системы по сравнению с эффективностью системы [5] очевидна.
На Фиг.9 представлены результаты сравнения точности регулирования предлагаемой адаптивной системы управления и наиболее близкого аналога [5] для объекта, находящегося в тех же условиях, что и на Фиг.8 в зависимости от величины транспортного запаздывания объекта управления τO. Система прототип с ростом τO интервала прогноза теряет устойчивость. Кривая 1 иллюстрирует зависимость отношения Qpid/Qas от τO предлагаемой системы, с реализацией прогноза сигнала самонастройки, а кривая 2 - системы без прогноза. Как следует из Фиг.9, эффективность предлагаемой системы с ростом величины транспортного запаздывания объекта снижается, но остается существенно выше эффективности и адаптивной системы без блока прогноза и тем более оптимального ПИД регулятора.
Исследовалась эффективность предлагаемой системы в подавлении воздействующего на объект случайного неконтролируемого экспоненциально коррелированного возмущения в условиях, когда скачкообразно изменяется задание основному (первому) регулятору при неточном знании динамики объекта. Рассматривался случай, когда постоянные времени объекта имели значения T10=55, T20=95, а постоянные времени эталонной модели не менялись и оставались равными T1m=35, T2m=75. В этих условиях точность отработки изменившегося скачком задания в предлагаемой системе примерно на 50% выше, чем у системы на базе ПИД регулятора, а эффективность подавления случайных неконтролируемых возмущений примерно в 4 раза выше, чем у ПИД регулятора, и в 2 раза выше, чем в адаптивной системе без блока прогноза. Система прототип, в условиях, когда изменяется задание регулятору, теряет устойчивость.
Таким образом, предлагаемая адаптивная система позволяет повысить точность регулирования и устойчивость системы за счет введения в цепь сигнальной самонастройки нового контура автоматического регулирования интервала прогноза прогнозирующего блока и контура настройки постоянной времени корректирующего фильтра. Интервал прогноза в предлагаемой системе автоматически подстраивается под изменяющиеся статистические свойства неконтролируемого возмущения. Автоматическая настройка постоянной времени корректирующего фильтра пропорционально интервалу прогноза позволяет дополнительно усложнить структуру и повысить эффективность прогнозирующего блока.
Предлагаемая адаптивная система наиболее легко может быть реализована на базе промышленных микропроцессорных контроллеров.
ЛИТЕРАТУРА
1. Солодовников В.В., Шрамко Л.С. Расчет и проектирование самонастраивающихся систем с эталонными моделями. М.: Машиностроение, 1972, с.35-37.
2. Громыко В.Д., Санковский Е.А. Самонастраивающиеся системы с моделью. М.: ЭНЕРГИЯ, 1974, с.17-22.
3. Авторское свидетельство СССР №591821, кл. G05B 17/02, 1977.
4. Авторское свидетельство СССР №824142, кл. G05B 17/02, 1979.
5. Авторское свидетельство СССР №1113781, кл. G05B 17/02, 1982.
6. Авторское свидетельство СССР №591821, кл. G05B 17/02, 13/04, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Система управления для объектов с запаздыванием | 1985 |
|
SU1280568A1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |

Изобретение относится к адаптивным системам управления и может найти применение в химической, нефтехимической, металлургической и других отраслях промышленности. Технический результат - повышение точности и устойчивости системы. Система содержит пять задатчиков, шесть сумматоров, два регулятора, объект управления, два блока временной задержки с фиксированным и перестраиваемым запаздыванием, блок прогнозирования с перестраиваемым интервалом прогноза, корректирующий фильтр с перестраиваемым интервалом прогноза, два формирователя сигналов уровней ограничения, три блока усреднения на скользящем интервале времени, три блока умножения, блок деления. 1 з.п. ф-лы, 9 ил.
1. Адаптивная система управления, содержащая первый задатчик входного сигнала, выход которого подключен к суммирующему входу первого сумматора, подключенного выходом к входу первого регулятора, выход первого регулятора подключен к суммирующему входу второго сумматора, объект управления, вход которого подключен к выходу второго сумматора, а выход объекта управления подключен к входу физически реализуемой инверсной модели объекта и к вычитающему входу первого сумматора, первый блок временной задержки, подключенный входом к выходу второго сумматора, а выход первого блока временной задержки подключен к вычитающему входу третьего сумматора, суммирующий вход которого подключен к выходу физически реализуемой инверсной модели объекта, блок прогноза с перестраиваемым интервалом прогноза, вход которого подключен к выходу третьего сумматора, отличающаяся тем, что с целью повышения точности системы в условиях запаздывания в объекте управления:
в систему введены корректирующий фильтр с перестраиваемой постоянной времени, первый и второй блоки ограничения и первый и второй формирователи сигналов уровней ограничения, первый, второй и третий блоки усреднения на скользящем интервале времени, первый, второй и третий блоки умножения, четвертый, пятый и шестой сумматоры, второй блок временной задержки с перестраиваемым запаздыванием, блок деления, второй, третий, четвертый и пятый задатчики сигналов, второй регулятор, причем первый вход корректирующего фильтра подключен к выходу прогнозирующего блока, выход корректирующего фильтра подключен к входу первого блока ограничения, выход которого подключен к вычитающему входу второго сумматора, второй и третий входы первого блока ограничения подключены к выходам первого формирователя сигналов уровней ограничения, вход первого блока усреднения на скользящем интервале времени подключен к выходу третьего сумматора, а выход первого блока усреднения на скользящем интервале времени подключен к вычитающему входу четвертого сумматора, суммирующий вход которого подключен к выходу третьего сумматора, вход второго блока временной задержки с перестраиваемым запаздыванием соединен с выходом четвертого сумматора, первый и второй входы первого блока умножения подключены к выходу четвертого сумматора, первый вход второго блока умножения подключен к выходу четвертого сумматора, а второй вход второго блока умножения соединен с выходом второго блока временной задержки с перестраиваемым запаздыванием, выход первого блока умножения соединен с входом второго блока усреднения на скользящем интервале времени, выход которого подключен к первому входу блока деления в качестве делителя, выход второго блока умножения соединен с входом третьего блока усреднения на скользящем интервале времени, выход которого подключен к второму входу блока деления в качестве делимого, выход блока деления подключен к суммирующему входу пятого сумматора, вычитающий вход пятого сумматора подключен к выходу второго задатчика, выход пятого сумматора подключен к первому информационному входу второго регулятора, второй параметрический вход второго регулятора подключен к третьему задатчику, выход второго регулятора подключен к первому входу второго блока ограничения, второй и третий входы второго блока ограничения подключены к выходам второго формирователя сигналов уровней ограничения, выход второго блока ограничения подключен к первому входу третьего блока умножения, к второму параметрическому входу второго блока временной задержки с перестраиваемым запаздыванием и к второму параметрическому входу блока прогноза, второй вход третьего блока умножения подключен к выходу четвертого задатчика, выход третьего блока умножения подключен к первому входу шестого сумматора, второй вход которого подключен к выходу пятого задатчика, выход шестого сумматора подключен к второму параметрическому входу корректирующего фильтра.
2. Система управления по п. 1, отличающаяся тем, что блок прогнозирования с перестраиваемым интервалом прогноза содержит последовательно соединенные сглаживающий фильтр, первый и второй дифференциаторы, первый усилитель, четвертый блок умножения, седьмой сумматор, а также второй усилитель, вход которого подключен к выходу первого дифференциатора, и пятый блок умножения, первый вход которого подключен к выходу второго усилителя, а выход - ко второму входу седьмого сумматора, к третьему входу седьмого сумматора подключен выход сглаживающего фильтра, вход сглаживающего фильтра подключен к выходу третьего сумматора, а вторые входы четвертого и пятого блоков умножения подключены к выходу второго регулятора.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| Адаптивная система управления с переменной структурой | 1988 |
|
SU1659980A1 |
| US 7418432 B2, 26.08.2008 | |||

