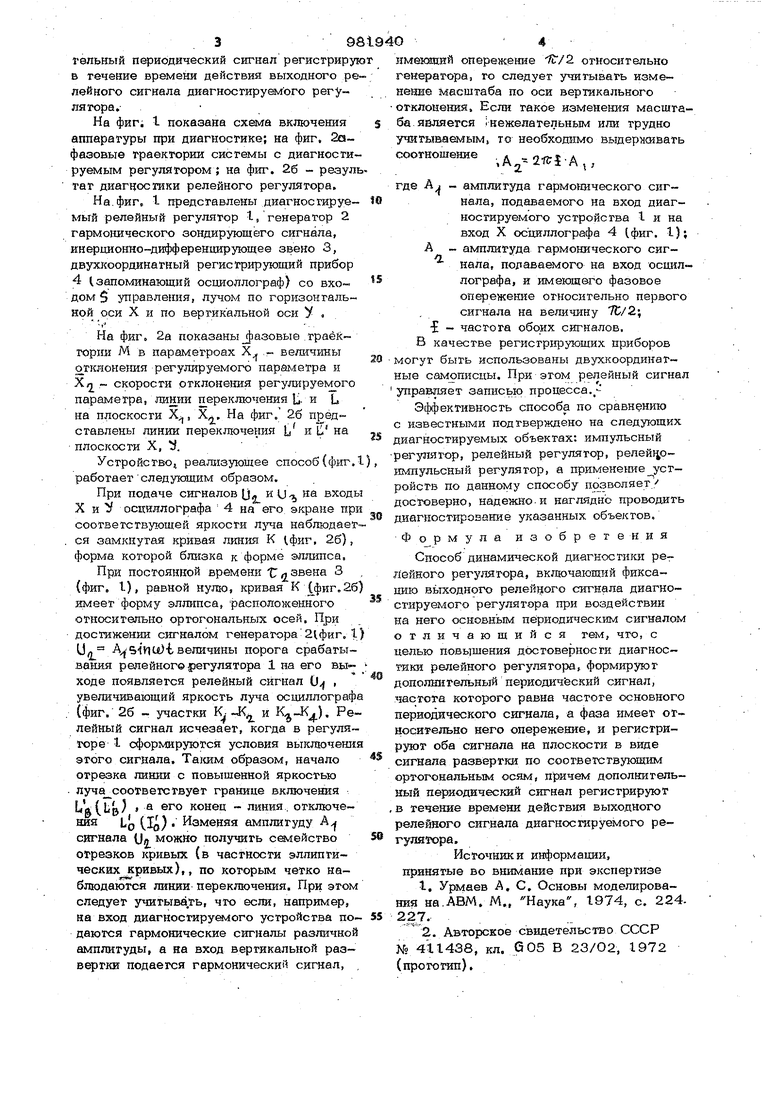
Изобрегение огносигся к авгомагическом у контролю аппаратуры управления и регулирования и может быть использо вано при диагностировании релейных регуляторов.. Известен способ диагностики, основан ный на физико-математическом моделировании контролируемой скста сы, включении релейного регулятора в замкнутый контур модель-регулятор., а работоспособность регулятора оценивают по модели изменения фазовых координат- 1 J , Недостатком способа является сложность его реализации ввиду необходимост большого объема моделирующего оборудования. Наиболее близким по технической сущ ности к предлагаемому является способ, согласно которому на вход диагностируемого устройства подают зондирующий сиг нал, фиксируют реакцию регулятора, а. полученный сигнал модулируют релейной функцией, и из этого сигнала путем фил рации выделяют первую гармонику сигнала, которую затем измер5пот Sl . Недостатками указанного способа явЛ5татся его сломскость, а также невозможность выделения первой гармоники релейного сигнала регулятора иа низких (ин- фанизких) частотах- и, как следствие, невысокая достоверность диагностики, Цель изобретения - повышение достоверности диагиастики. Цель достигается т&л, что согласно способу динамической диагностики релейного регулятора, включающему фиксацию выходного релейного сигнала диагностируемого регулятора при воздействии на него основным периодическим сигналом, формируют дополнительный периодический сигнал, частота которого равна часгоге основного периодического сигнала, а фаза имеет относительно него опережение, к регистрируют оба .сигнала на плоскости в виде сигнала развертки по соответствующим ортогональным осям, причем дополни:гвпьный периодический сигнал регистриру в течение времени действия выходного ре лейного сигнала диагностируемого регулятора. На фиг; t показана схема включения аппаратуры при диагностике; на фиг, 2афааовые траектории системы с диагностируемым регулятором; на фиг. 26 - резул тат диагностики релейного регулятора. На. фиг, 1 представлены диагносгируемый релейный регулятор 1, генератор 2 гармо1шческого зондирующего сигнала, инерционно-дифференцирующее звено 3, двухкоординатный регистрирующий прибор 4 I запоминающий осциоллограф) со входом $ управления, лучом по горизонтальной оси X и по вертикальной оси У , На фиг. 2а показаны фазовые ,траёй тории М в параметроах Х ,- величины отклонения регулируемого пapQ лeтpa и Х скорости отклоне 1ия регул фуемрго параметра, линии переключения IJ. и L на плоскости Х, Х. На фиг. 26 представлены линии переключения Ь и li я плоскости X, У. Устройство, реализующее способ{фигД работаетследующим образом. При подаче сигналов (j. и у на входы X и i/ осциллографа 4 на его экране пр соответствующей яркости наблюдает ся замкнутая кривая линия К 1.фиг, 26), форма которой близка к форме элщшса. При постоянной времени tr 2 звена 3 (фиг. I), равной нулю, кривая К фиг.2б имеет форму эллипса, расположенного относительно ортогональных осей. При достижении сигналом генератора 21фиг. I Urt A StHU) величины порога срабатывания релейного регулятора 1 па его выходе появляется релейный сигнал 0 , увеличивающий яркость луча осциллограф . (фиг. 26 - участки К -К и ). Релейный сигнал исчезает, когда в регуля горе 1 сформируются условия выключени этого сигнала. Та1шм образом, начало отрезка ливни с повышенной яркостью луча соогветствует границе включения Цл ((L) , а его конец линия, отключения LP ( . Изменяя амплитуду А сигнала (J можно получить соугейство огрезков кривых (в частности эллиптических ривых),, по которым четко наблюдаются линии переключения. При этом следует учитывать, что если, например, на вход диагностирует юго устройства по- даются гармонические сигналы различной амплитуды, а ка вход вертикальной развертгаег подается гармонический сигнал, имеювдий опережение /2 относительно генератора, то следует учитывать изме- не1ше масштаба по оси вертикального отклоиения. Если такое изменения масштаба, является i нежала тельным или трудно учитываемым, то необходимо выдерживать соотношение , д,. , , где А - амплитуда гармонического сигнала, подаваемого на вход диагностируемого устройства I к на вход X осциллографа 4 (фиг. 1); А - амплитуда гармонического сигнала, подаваемого на вход осциллографа, и имеющего фазовое опережение относительно первого сигнала на величину 7С/2; { - частота обоих сигналов, В качестве регистрирующих приборов могут быть использованы двухкоордикат- ные самописцы. При этом релейный сигнал управляет записью процесса./ Эффективность способа по сравнению с известными подгверждено на следующих диагностируемых объектах: импульсный регу7Ю1юр, релейный регулятор, релейцо15мпуяьсный регулятор, а npnMeHetrae ycTройств по данному способу позволяет.. достоверно, надежно, и наглядно проводить диагмостирование указанных объектов, Формула изобретения Способ динамической диагностики релейного регулятора, включающий фиксацию выходного релейного сигнала диагносгируетлого регулятора при воздействии на него основным пёриоди юским сигналом отличающийся тем, что, с целью повь щения достоверности диагностики релейного регулятора, формируют дополнительный периодический сигнал, частота которого равна частоте основного периодического сигнала, а фаза имеет относительно него опережение, и регистрируют оба сигнала на плоскости в виде сигнала развертки по соответствующим ортогональным осям, причем дополнительный периодический сигнал регистрируют в течение времени действия выходного релейного сигнала диагностируемого регулятора. Источники информации, принятые во внимание при экспертизе 1, Урмаев А, С, Основы моделирования на.АВМ. М., Наука 1974, с. 224227. 2. Авторское свидетельство СССР № 411438, кл. G05 В 23/О2, 1972 (прототип).
Ьо
UxA
Ко 0
Фиг. г