Изобретение относится к области измерений и предназначено для определения статической погрешности вращающегося трансформатора, включенного по схеме фазовращателя, может быть использовано при метрологических исследованиях синусно-косинусных вращающихся трансформаторов, а также для их выборочного входного контроля.
Известен способ измерения статической погрешности вращающегося трансформатора (патент РФ №2362178 приоритет от 23.04.2008 «Устройство для измерения статической погрешности вращающегося трансформатора», Денисенко П.В., Семенов И.А., МПК: G01R 35/02, Н03М 1/10, опубликовано 20.07.2009 Бюл. №20), заключающийся в следующем. Установленный на углозадающем узле исследуемый вращающийся трансформатор формирует в сигнальных обмотках сигналы, амплитуда которых при вращении изменяется по закону синуса и косинуса. Эти сигналы поступают на первый вход переключателя, с выхода которого они поступают на вход аналого-цифрового преобразователя (АЦП), где преобразуются в цифровой код, которым управляется блок регистрации. Информация регистрируется в виде числа, соответствующего заданному углу. На второй вход переключателя с цифроаналогового преобразователя (ЦАП) поступают сигналы, амплитуда которых изменяется по закону синуса и косинуса в соответствии с цифровым кодом, формируемым вычислительным устройством по программе. Для формирования опорного напряжения ЦАП используется источник переменного напряжения, подключенный к входу опорного напряжения ЦАП. Для отображения величины угла, задаваемого вычислительным устройством, используется монитор, подключенный к его видеовыходу. Таким образом, перед началом исследования вращающегося трансформатора, установив переключатель в положение контроля, можно с высокой точностью задавать на вход АЦП сигналы, пропорциональные по амплитуде синусу и косинусу угла. Эти сигналы преобразуются с помощью АЦП в цифровой код, который управляет блоком регистрации. Информация регистрируется в виде числа, соответствующего заданному углу. Погрешность устройства определяется сравнением величины угла заданного вычислительным устройством с показанием блока регистрации.
Недостатками известного способа измерения статической погрешности вращающегося трансформатора являются:
- контролируется не значение заданного углозадающим узлом текущего углового положения (УП) путем его измерения, а гипотетическое значение сигналов в сигнальных обмотках вращающегося трансформатора, которое теоретически должно соответствовать текущему заданному угловому положению; это гипотетическое значение сигналов в сигнальных обмотках вращающегося трансформатора вычисляется вычислительным устройством, а затем дважды (сначала ЦАП, потом АЦП) преобразуется, при этом (на пути от вычислительного устройства до блока регистрации) вносятся недетерминированные погрешности программой вычислительного устройства и узлами ЦАП, переключателя, АЦП; следовательно, измеренную таким способом статическую погрешность вращающегося трансформатора нельзя считать достоверной.
- на пути (от сигнальных обмоток вращающегося трансформатора до блока регистрации) следования сигналов сигнальных обмоток вращающегося трансформатора вносятся недетерминированные погрешности узлами переключателя и АЦП;
- для применения данного способа требуется метрологическая аттестация используемых программных и технических средств.
Техническая проблема, на решение которой направлено изобретение, заключается в:
- создании способа, при котором обеспечивается достоверный результат определения статической погрешности вращающегося трансформатора, включенного по схеме фазовращателя, с высокой точностью.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности определения статической погрешности вращающегося трансформатора.
Данные технические результаты достигаются тем, что способ определения статической погрешности вращающегося трансформатора, заключается в том, что вращающийся трансформатор соосно устанавливают на поворотном столе измерительного микроскопа, при этом на валу ротора вращающегося трансформатора ортогонально его оси закрепляют дисковый шкив, затем устанавливают и регистрируют начальное угловое положение ротора вращающегося трансформатора, затем на косинусную и синусную обмотки возбуждения вращающегося трансформатора подают сдвинутые по фазе на 90° и с одинаковой номинальной амплитудой и частотой гармонические сигналы, затем регистрируют фазу сигнала с измерительной обмотки вращающегося трансформатора, значение которой считают соответствующим значению измерительного углового положения ротора, затем поворотный стол поворачивают вокруг своей оси на малый заданный угол α, если n*α≤360°, где n=1, 2, 3, …, - количество поворотов измерительного стола, то ротор вращающегося трансформатора возвращают в начальное угловое положение и регистрируют фазу сигнала с измерительной обмотки вращающегося трансформатора, если n*α>360°, то сравнивают каждое из к значений измеренных угловых положений ротора, где k=1, 2, 3, …, с соответствующим заданным значением углового положения ротора, при этом результат сравнения (вычитания) является значением абсолютной статической погрешности вращающегося трансформатора
В заявляемом способе обеспечивается достоверное и с высокой точностью определение статической погрешности вращающегося трансформатора тем, что контролируется значение заданного углового положения ротора путем его измерения с последующим сравнением его с значением измеренного углового положения ротора, при этом все измерения производятся прямым методом непосредственно в искомых физических величинах и с высокой степенью точности благодаря применению измерительного микроскопа (с наличием в нем поворотного стола со шкалой, проградуированной с высокой точностью в искомых физических величинах) и частотомера с высокоточным многоразрядным цифровым индикатором, также отображающим значения в искомых физических величинах.
В используемом комплексе технических средств нет узлов переключения и каких-либо преобразований, а также недетерминированных источников погрешности, т.к. последние определяются результатами периодических метрологических поверок и техническими паспортами изготовителя технологических оснасток.
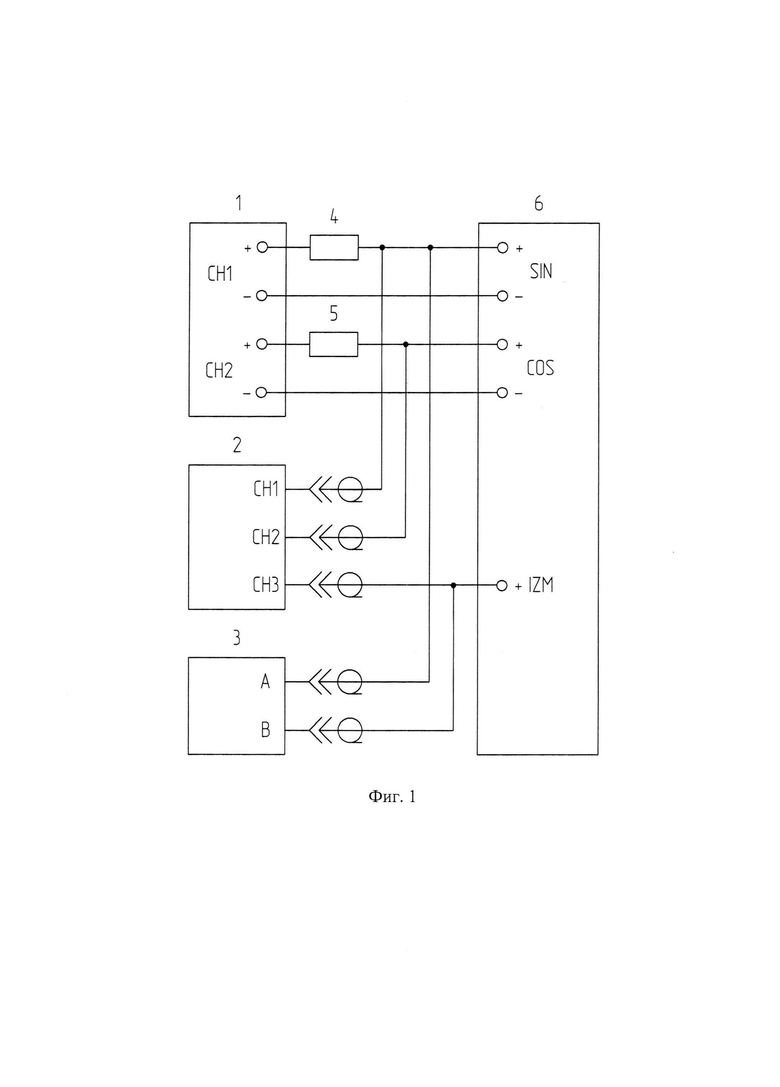
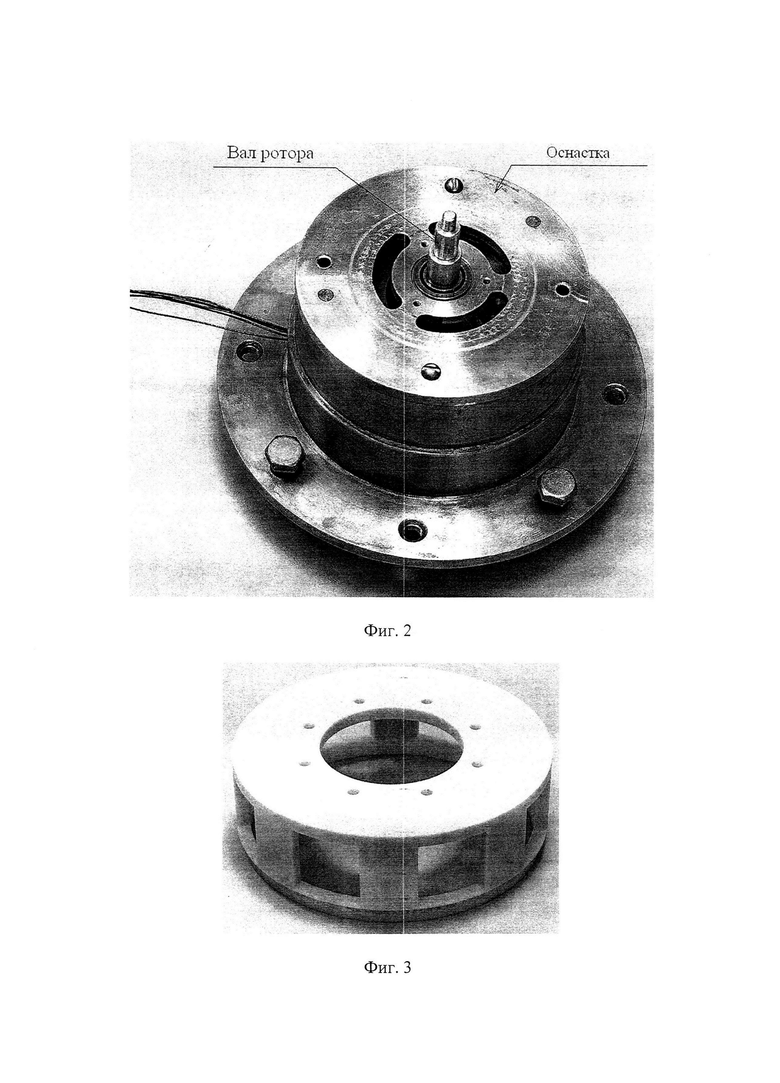
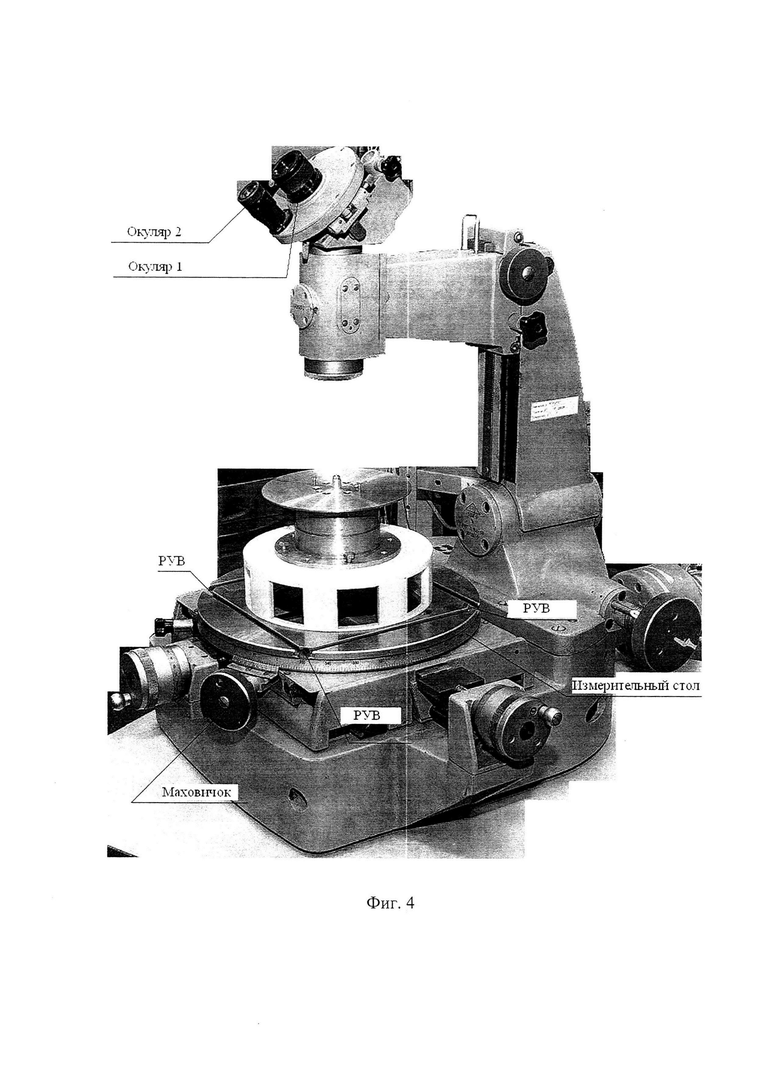
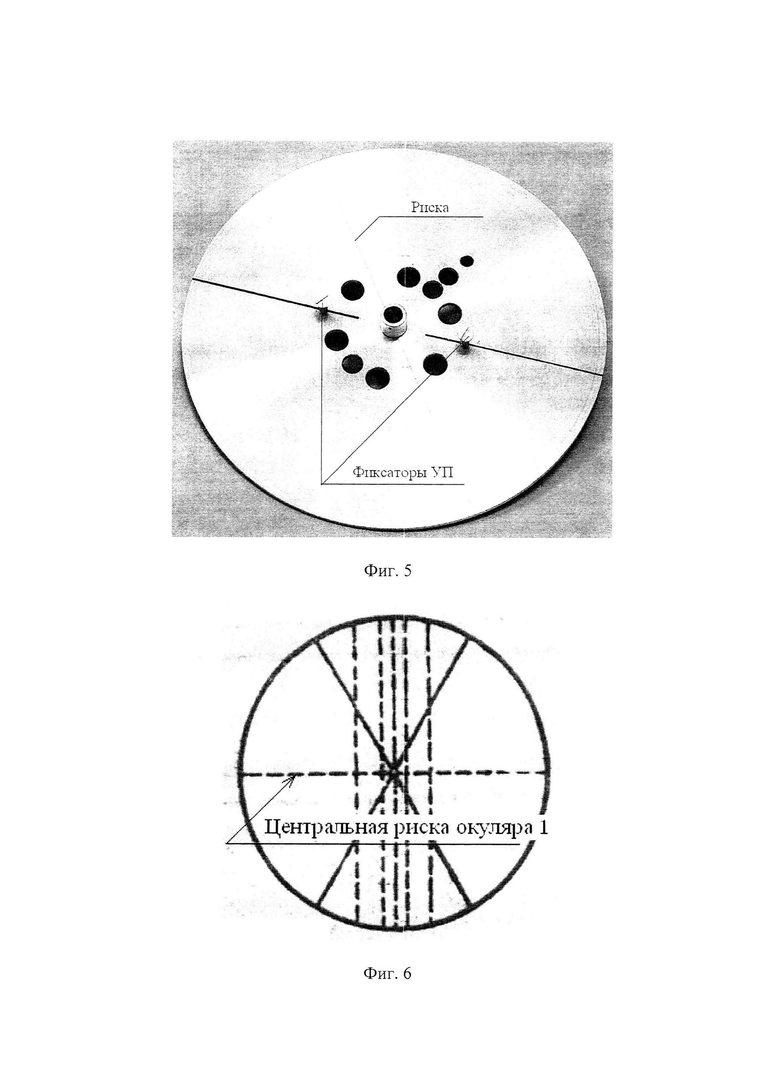
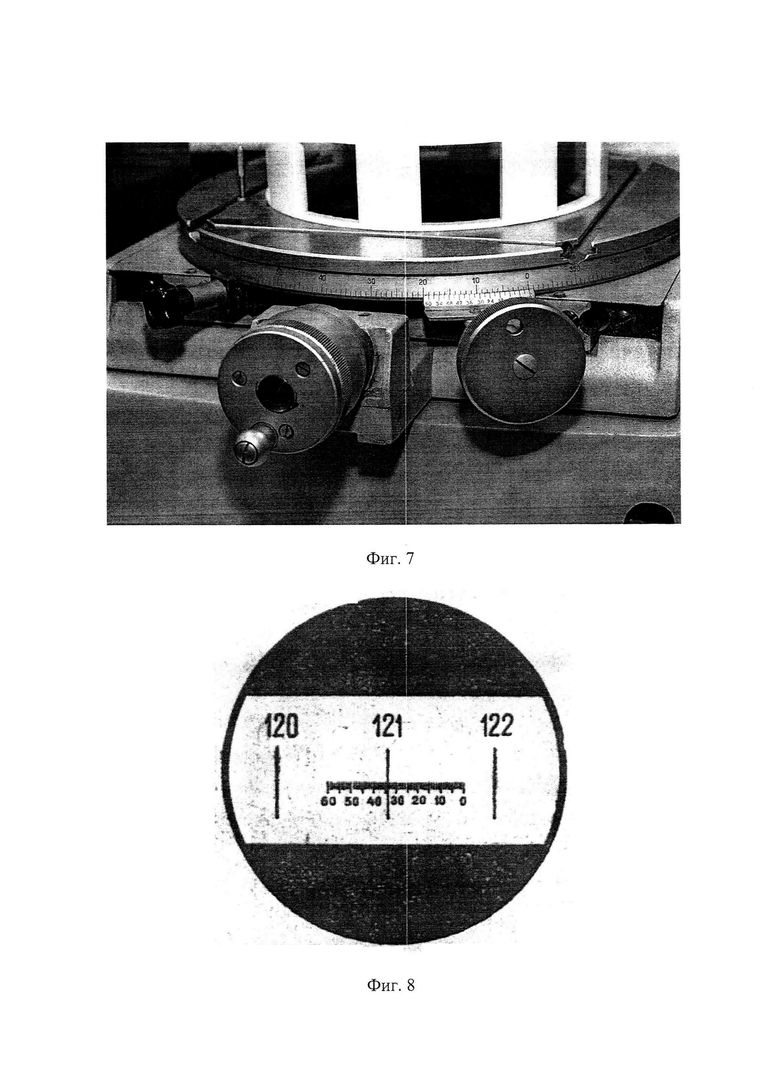
На фиг. 1 представлена электрическая схема соединений аппаратных компонентов для реализации заявленного способа, на фиг. 2 представлен вращающийся трансформатор, собранный в технологической оснастке, на фиг. 3 - кронштейн, на фиг. 4 - измерительный микроскоп, на фиг. 5 - поворотный дисковый шкив, на фиг. 6 - вид в окне окуляра 1, на фиг. 7 - шкала измерительного стола измерительного микроскопа, на фиг. 8 - вид в окне окуляра 2.
Электрическая схема (фиг. 1) содержит генератор 1 гармонических сигналов, один выход которого через прецизионный согласующий резистор 4 подключен к входу SIN вращающегося трансформатора 6 и к первым входам осциллографа 2 и частотометра 3, а другой выход через прецизионный согласующий резистор 5 подключен к входу COS вращающегося трансформатора 6 и ко второму входу осциллографа 2, выход IZM вращающегося трансформатора 6 подключен к третьему входу осциллографа 2 и ко второму входу частотометра 3.
Способ определения статической погрешности вращающегося трансформатора осуществляется следующим образом.
Вращающийся трансформатор, собранный в технологической оснастке (фиг. 2), посредством кронштейна (фиг. 3) закрепляют соосно на поворотном столе измерительного микроскопа (фиг. 4). На верхней части вала ротора вращающегося трансформатора (фиг. 2) ортогонально его оси закрепляют дисковый шкив (фиг. 5). Шкив имеет максимально возможный диаметр (это влияет на точность измерений углового положения ротора), ограничиваемый только конструкцией измерительного микроскопа. Плоскость верхней поверхности шкива должна быть строго ортогональна оси ротора вращающегося трансформатора, а последняя совпадать с осью поворотного стола. На верхней поверхности шкива, установленного на оси ротора вращающегося трансформатора, нанесена риска, проходящая от края до края шкива точно через его геометрический центр. На шкиве имеются два фиксатора текущего углового положения, например, в виде двух, противоположно расположенных относительно центра, вкрученных в него винтов с коническими или закругленными концевиками.
Перед началом проведения измерений необходимо произвести центровку поворотного стола измерительного микроскопа (ИМ) (согласно руководству пользователя), а также проверить наличие прецессии при вращении поворотного дискового шкива и устранить (минимизировать) ее в случае наличия. Для этого сначала надо точно совместить риску шкива с центральной риской (фиг. 6) измерительного микроскопа, ведя визуальное наблюдение через окуляр 1 (фиг. 4), путем вращения ротора вращающегося трансформатора и соответствующих регулирующих установочных винтов (РУВ) поворотного стола, которыми фиксируется кронштейн (фиг. 3) в его пазу. Затем следует повернуть поворотный стол измерительного микроскопа на 180°, вращения его маховичок (фиг. 4), и сличить совместимость риски шкива с центральной риской окуляра 1. Если риски не совмещены, добиться их совмещения путем регулировки установочных винтов поворотного стола. Затем снова повернуть поворотный стол на 180° и сличить совместимость рискок. В случае их не совмещения добиться их совмещения путем регулировки установочных винтов поворотного стола ИМ. Повторять операцию (поворот стола ИМ на 180° и регулировка установочных винтов) до полного (или максимального) совмещения рисок в обоих противофазных угловых положениях шкива.
После устранения (или минимизации) прецессии поворотного дискового шкива приступить к измерениям текущих угловых положений (заданного и измеренного) ротора вращающегося трансформатора.
Устанавливают и регистрируют начальное угловое положение ротора вращающегося трансформатора. Вращением маховичка установить поворотный стол измерительного микроскопа в исходное (нулевое) угловое положение (УП) по нониусу его шкалы (фиг. 7). Вращением ротора вращающегося трансформатора установить его начальное (нулевое) УП, совместив фазы сигналов «SIN» и «IZM» на диаграмме осцилографа, при этом частотомер должен индицировать нулевое значение. Не меняя нулевого УП ротора вращающегося трансформатора, вращением дискового шкива совместить риски шкива и центральной риски окуляра 1 и зафиксировать фиксаторами это положение шкива. Зарегистрировать показания нониуса ИМ и индикатора частотомера.
Затем с генератора 1 гармонические сигналы СН1 и СН2, сдвинутые по фазе относительно друг друга на 90°, с одинаковой номинальной амплитудой и частотой напряжения подают (через прецизионные согласующие резисторы 4 и 5, при необходимости) на синусную (SIN) и косинусную (COS) обмотки возбуждения вращающегося трансформатора 6. Одновременно гармонические сигналы СН1 и СН2 подают на входы СН1 и СН2 осциллографа 2 для визуального контроля. На измерительный канал «А» частотомера 3, переведенного в режим измерения разности фаз между каналами «А» и «В», в качестве опорного подается сигнал «SIN», а на измерительный канал «В» подается сигнал «IZM» с измерительной обмотки вращающегося трансформатора 6. При этом частотомер 3 индицирует текущую фазу сигнала «IZM» с измерительной обмотки вращающегося трансформатора 6 относительно фазы опорного сигнала «SIN», т.е. их (фаз) текущую разницу. Текущая разница фаз сигналов «SPN» и «IZM» - это искомое измеренное значение текущего углового положения ротора вращающегося трансформатора. Также сигнал «IZM» подается на вход СН3 осцилографа 2 для визуального контроля.
Вращением маховичка ИМ поворочивают поворотный стол на заданный малый угол α, затем вернуть ротор вращающегося трансформатора в начальное УП относительно измерительного стола, совместив риску шкива с центральной риской окуляра 1 поворотом шкива в направлении, противоположном направлению предшествующего поворота стола. Зарегистрировать текущие показания шкалы измерительного микроскопа (заданное УП) и частотомера (измеренное УП).
Если n*α≤360°, где n=1, 2, 3, …, - количество поворотов измерительного стола, то ротор вращающегося трансформатора возвращают в начальное угловое положение и регистрируют фазу сигнала с измерительной обмотки вращающегося трансформатора, если n*α>360°, то сравнивают каждое из к значений измеренных угловых положений ротора, где k=1, 2, 3, …, с соответствующим заданным значением углового положения ротора. Разница между текущим заданным и измеренным УП - это искомое значение статической абсолютной погрешности вращающегося трансформатора. Повторять данную операцию до завершения полного оборота измерительного стола (360° (угл. градуса).
При необходимости более точного измерения УП следует использовать шкалу окуляра 2 угломерной головки (фиг. 8) согласно руководству пользователя измерительного микроскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поверки преобразователей углапОВОРОТА ВАлА B КОд и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU824265A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Устройство для измерения момента электрических микромашин | 1978 |
|
SU717575A1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Устройство для контроля точности индукционных датчиков магнитного курса | 1983 |
|
SU1210059A1 |
| Способ регулирования датчика угловых перемещений | 1989 |
|
SU1781672A1 |
| Способ определения параметров датчиков угла | 1980 |
|
SU890426A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| Способ измерения характеристик направленности излучающей гидроакустической антенны | 2023 |
|
RU2817561C1 |
| Устройство для измерения погрешности одноканальной электромашинной системы передачи угла | 1978 |
|
SU743126A1 |
Изобретение относится к области измерений и предназначено для определения статической погрешности вращающегося трансформатора, включенного по схеме фазовращателя. Технический результат: повышение точности определения статической погрешности вращающегося трансформатора. Сущность: вращающийся трансформатор соосно устанавливают на поворотном столе измерительного микроскопа. На валу ротора вращающегося трансформатора ортогонально его оси закрепляют дисковый шкив. Затем устанавливают и регистрируют посредством высокоточной шкалы, проградуированной в угловых единицах, поворотного стола измерительного микроскопа начальное заданное угловое положение ротора вращающегося трансформатора. Затем на косинусную и синусную обмотки возбуждения вращающегося трансформатора подают сдвинутые по фазе на 90° и с одинаковой номинальной амплитудой и частотой гармонические сигналы. Посредством частотомера с высокоточным индикатором значения в угловых единицах регистрируют начальную фазу сигнала, поступающего с измерительной обмотки вращающегося трансформатора, значение которой является измеренным значением углового положения ротора. Затем поворотный стол поворачивают вокруг своей оси на малый заданный угол α, если n*α<360°, где n=1,2,3,…, - количество поворотов измерительного стола, то ротор вращающегося трансформатора возвращают в начальное угловое положение и регистрируют значения заданных и измеренных угловых положений ротора посредством шкалы поворотного стола измерительного микроскопа и индикатора частотомера соответственно. Если n*α>360°, то сравнивают каждое из значений измеренных угловых положений ротора с соответствующим заданным значением углового положения ротора. Результат сравнения является значением абсолютной статической погрешности вращающегося трансформатора. 8 ил.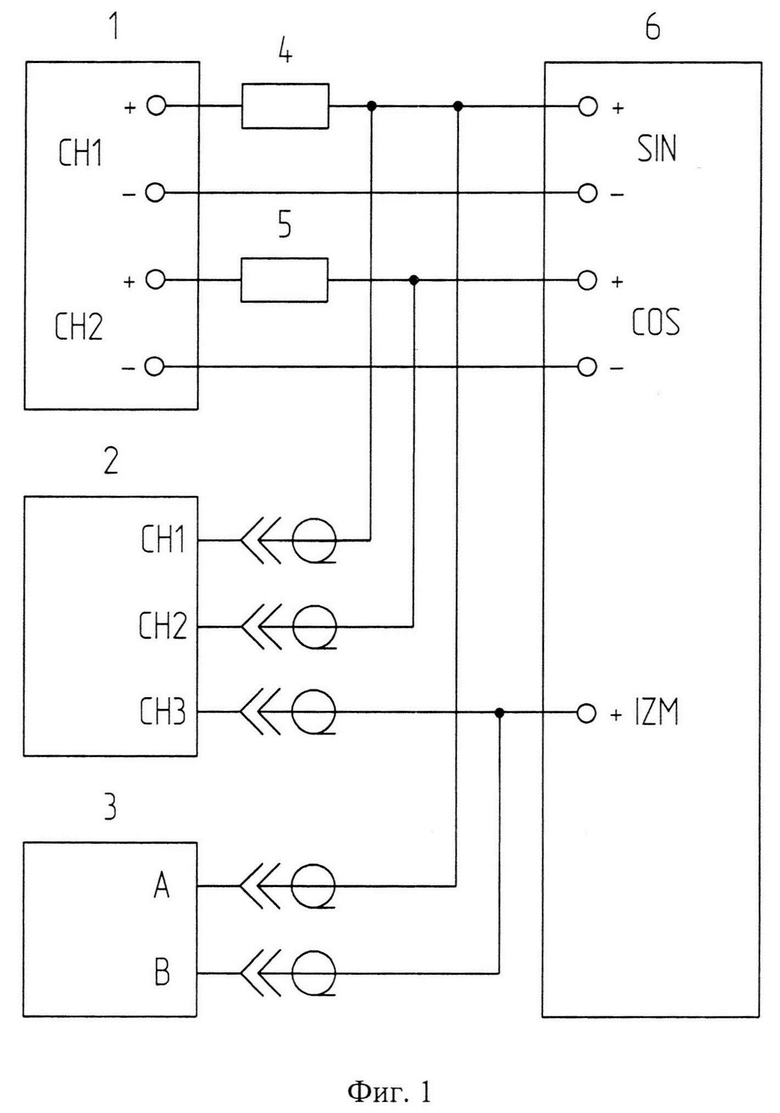
Способ определения статической погрешности вращающегося трансформатора, заключающийся в том, что вращающийся трансформатор соосно устанавливают на поворотном столе измерительного микроскопа, при этом на валу ротора вращающегося трансформатора ортогонально его оси закрепляют дисковый шкив, затем устанавливают и регистрируют посредством высокоточной шкалы, проградуированной в угловых единицах, поворотного стола измерительного микроскопа начальное заданное угловое положение ротора вращающегося трансформатора, затем на косинусную и синусную обмотки возбуждения вращающегося трансформатора подают сдвинутые по фазе на 90° и с одинаковой номинальной амплитудой и частотой гармонические сигналы и посредством частотомера с высокоточным индикатором значения в угловых единицах регистрируют начальную фазу сигнала, поступающего с измерительной обмотки вращающегося трансформатора, значение которой является измеренным значением углового положения ротора, затем поворотный стол поворачивают вокруг своей оси на малый заданный угол α, если n*α<360°, где n=1,2,3,…, - количество поворотов измерительного стола, то ротор вращающегося трансформатора возвращают в начальное угловое положение и регистрируют значения заданных и измеренных угловых положений ротора посредством шкалы поворотного стола измерительного микроскопа и индикатора частотомера соответственно, если n*α>360°, то сравнивают каждое из значений измеренных угловых положений ротора с соответствующим заданным значением углового положения ротора, при этом результат сравнения является значением абсолютной статической погрешности вращающегося трансформатора.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТИЧЕСКОЙ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2007 |
|
RU2359404C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТИЧЕСКОЙ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2008 |
|
RU2362178C1 |
| Способ измерения погрешности вращающегося трансформатора | 1989 |
|
SU1669056A1 |
| Способ измерения погрешности вращающегося трансформатора | 1973 |
|
SU544060A1 |
| Способ измерения погрешности синусно-косинусного вращающегося трансформатора | 1984 |
|
SU1241363A1 |
| CN 103499365 A, 08.01.2014. | |||

