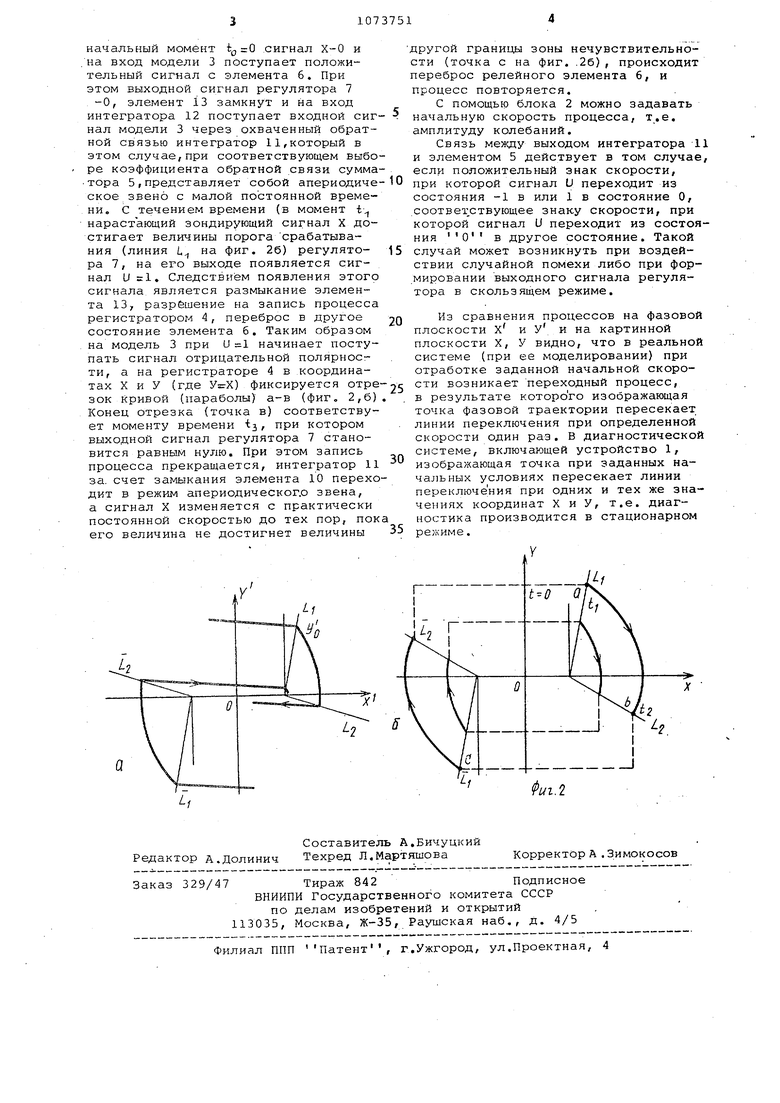
Изобретение относится к диагностике работоспособности динамически систем и их функциональных элементо и может найти применение при диагно стике релейных регуляторов, для кот рых статические методы контроля малопригодны, например при диагностик пропорционально-дифференциальных, пропорционально-интегральных и других подобного типа регуляторов. Известно устройство для диагност ки, содержащее генератор зондирующи сигналов, выход которого соединен с входом диагностируемого объекта, и регистрирующая аппаратура, входы которой соединены соответственно с входом и выходом,диагностируемого объекта Cl3. Недостатком известного устройства является малая его эффективность при диагностике существеЕ1но нелинейных (релейных) устройств в диапазоне инфранизких частот (от 0,1-0,5 Гц- и ниже), что вызвано сложностью аппаратуры обработки выходных сигналов Диагностируемых устройств. Наиболее близким по технической сущности является диагностическое моделирующее устройство, содержащее модель регулируемого объекта, задатчик начальных условий (амплитуды начальных колебаний) и регистратор, входы которого соответственно соединены с выходами модели по регистрируемым параметрам (координатам) Г2 Недостатком известного устройства является невозможность его использования при диагностике в,стационарном режиме. Цель изобретения - расширение функциональных возможностей за счет обеспечения динамической диагностики в стационарном режиме. . Поставленная цель достигается тем, что в.устройство, содержащее за /датчик амплитуды колебаний и модель регулируемого объекта, имеющую выход регулируемого параметра, являющийся выходом устройства, и выход скорости изменения регулируемого параметра, причем выход регулируемого параметра модели регулируемого объекта соединен с nepBbHvi входом регистратора, а выход скорости изменения регулируемого параметра - со вторым входом регистратора, введены последовательно соединенные алгебраический сумматор и двухпозиционный гистерезисный .элемент, выход которого соединен с входом модели -регулируемого объекта а управляющий вход подключен к выходу задатчика амплитуды колебаний, вьочитающий вход алгебраического сумматора соединен с выходом скорости изменения регулируемого параметра модели регулируемого объекта, а суммирующий вход - с контрольным входом устройства. На фиг. 1 приведено устройство для динамической диагностики релейных регуляторов с моделью регулируемого объекта второго порядка; на фиг, 2 - фазовый портрет реальной системы управления объектом второго порядка, (фиг. 2а) и картинная плоскость процесса (фиг„ 26), регистрируемого в устройстве, приведенном на фиг, 1, Устройство 1 для динамической диагностики релейных регуляторов, содержит, задатчик 2 амплитуды колебаний, модель 3 регулируемого объекта, регистратор 4 , алгебраический cy iMaтор 5 и двухпозиционный релейный гистерезисный элемент б, Диагностируемый регулятор 7 своими выходом и входом подключен соответственно к контрольному входу 8 и выходу 9 устройства 1, Модель 3 регулируемого объекта выполнена в виде последовательно соединенных сумматора 10 и интеграторов 11 и 12, причем интегратор 11 охвачен коммутируемой отрицательной обратной связью через ключевой элемент 13. Выход интегратора 11 является выходом скорости изменения регулируемого параметра модели 3 и соединен с вычитающим входом алгебраического сумматора 5 и вторым входом регистратора 4, представляющего собой двухкоординатный осциллограф (или самописец). Выход интегратора 12 является выходом регулируемого па-раметра модели 3 и соединен с первым входом X регистратора 4 и выходом 9 устройства 1. Сигнал X является зондирующим сигналом для диагностируемого регулятора 7, выходным (ненулевым) сигналом которого производится размыкание ключевого элемента 13 и управление записью (по входу) регистратора 4. Контрольный вход 8 устройства 1 подключен к суммирующему входу алгебраического сумматора 5, выход которого соединен с информационным входом двухпозиционного релейного гистерезисного элемента 6, управляющим входом подключенного к выходу задатчика 2 амплитуды колебаний. Устройство работает следующим образом. Пусть, например, фазовый портрет в координатах х, У системы второго порядка имеет вид, представленный на фиг. 2а, где U, L - линии включения, 1,2 и L2 линии отключения. Задачей диагностики является определение правильности положения линий 1, HS плоскости х ,У Рассмотрим процессы в системе, состоящей из устройства для динамической диагностики 1 и диагностируемого регулятора 1, полагая, что в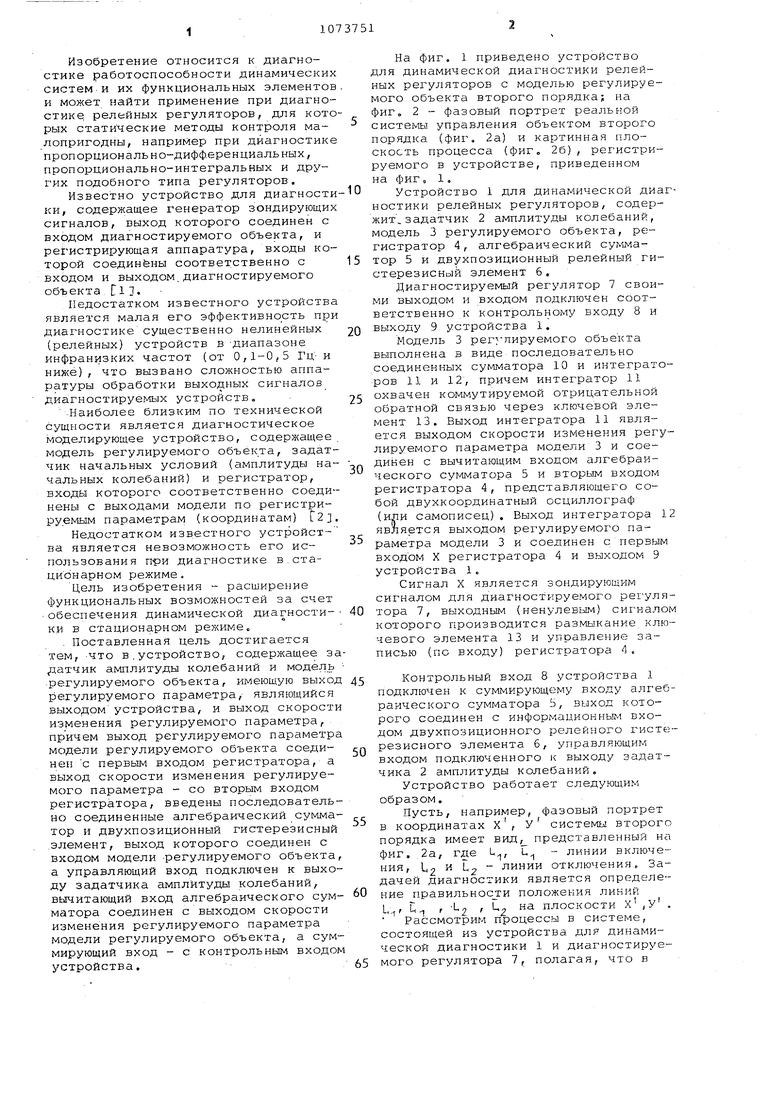
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Способ управления | 1975 |
|
SU805247A1 |
| Способ динамической диагностики релейного регулятора | 1980 |
|
SU981940A1 |
| Устройство для контроля релейного регулятора | 1980 |
|
SU930276A1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Устройство для регулирования неэлектрических величин | 1979 |
|
SU860017A1 |
) УСТРОЙСТВО ДЛЯ ДИHAjMИЧECKOЙ ДИАГНОСТИКИ РЕЛЕЙНЫХ РЕГУЛЯТОРОВ, содержащее задатчик амплитуды колебаний и модель регулируемого объекта, имеющую выход регулируемого параметра, являющийся выходом устройства, и выход скорости изменения регулируемого параметра, причем выход регулируемого параметра модели регулируемого объекта соединен с первым входом регистратора, а выход скорости изменения регулируемого параметра с вторЕлм входом регистратора, о тлишающееся тем,что, с целью расширения функциональных возможностей устройства за счет обеспечения динамической диагностики в стационарном режиме, в него введены последовательно соединенные алгебраический сумматор и двухпозицйонный релейный гистерезисный элемент, выход которого соединен с входом модели регулиру мого объекта, а управляюций вход подключен к выходу задатчика амплитуды коле бани и, вычитающий вход алгебраического сумматора соединен с вы- § ходом скорости изменения регулируе- i (Л мого параметра модели регулируемого объекта, а суммирующий вход - с контрольным входом устройства. со ел 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вавилов А.А | |||
| идр | |||
| Экспериментальное определение частотных характеристик автоматических систем | |||
| М., Госэнергоиздат, 1963, с.36 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Урмаев А.С | |||
| Основы моделирования на АВМ, М., Наука, 1974, с | |||
| Фотореле для аппарата, служащего для передачи на расстояние изображений | 1920 |
|
SU224A1 |
