Изобретение относится к погрузочным машинам, имеющим исполнитель.ный орган непрерывного действия в виде парных нагребаквдих лап, и может быть использовано в подземных условиях на открытых разработках, на складах сыпучих и кусковатых материалов, в портах на перевалочных базах и т.п.
Известны погрузочные органы непрерывного действия, содержащие приемный стол, конвейер и нагребающие лапы, приводимые в действие, от гидромотора через систему передачtilНедостатком известных погрузочных органов является сложность приводного механизма нагребающих лап.
Известен также погрузочный орган, включающий приемный стол, конвейер, нагребающие лапы клинообразной формы, жестко закрепленные на осях, расположенных перпендикулярно приемному столу. Лапы приводятся в возвратноповоротное движение через рычаг с помощью двух гидроцилиндров поступательного действия 2.
Недостатком известного погрузочного органа является то, что он не дает расположить конвейер ближе к погружаемому материалу для сокращения времени погрузки материёша лапами на конвейер. Расположение гидроцилиндров в передней части приемного стола увеличивает угол наклона приемного стола к грризонтгшьнсй поверхности. Это с одной стороны, создает дополнительные нагрузки на механизм внедрения всего погрузочного органа в штабель погружаемого мате10риала, с другой стороны, при погрузке материала объем материала, захваченный гребком в процессе перемещения разделяется на две части. Одна часть доставляется гребком на
15 конвейер, а другая часть отрывается от гребка и под действием силы тяжести устремляется в сторону, попадая под захват второго гребка. С уменьшением угла наклона приемного стола
20 к горизонтальной поверхности часть материала, уходящего на перелопачивание, уменьшается и при расположении приемного стола, близком к горизонтальному, весь материал, захватываемый лапой, погружался бы на конвейер.
Цель изобретения - повышение пройзводительности.
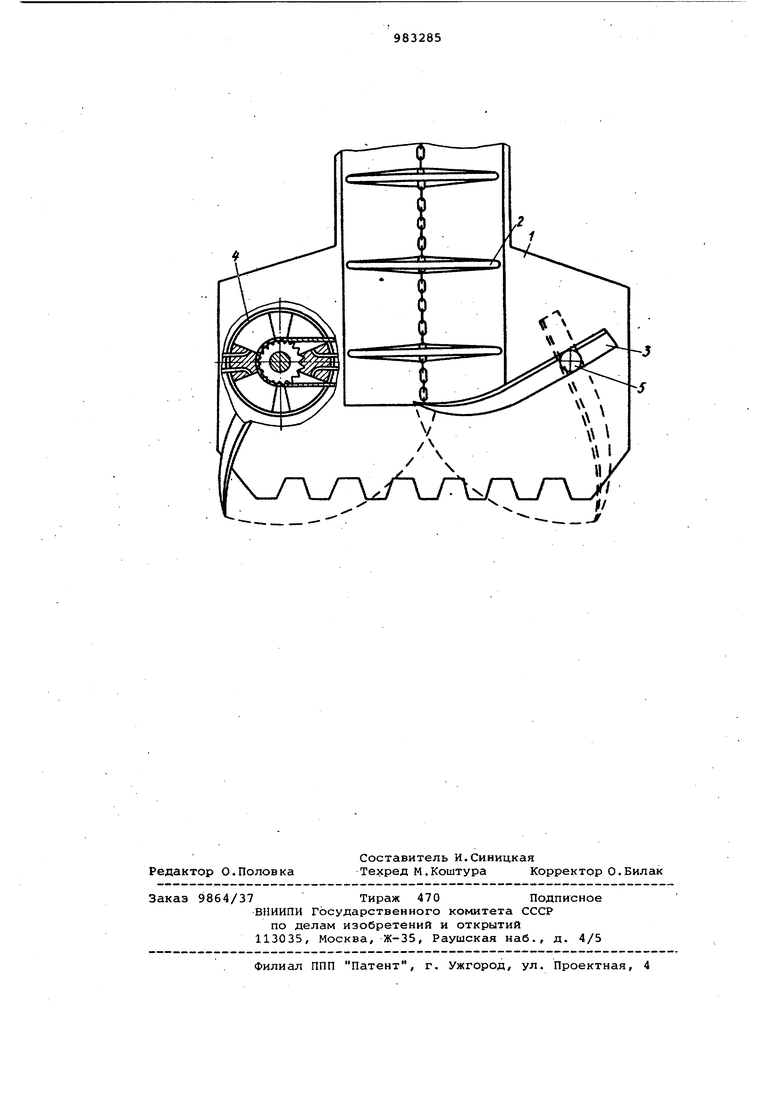
Цель достигается тем, что в погрузочном органе непрерывного действия/ включающем приемный стол, конвейер, нагребающие лапы, установленные на валах с возможностью возвратно-поворотного движения, и привод нагребающих лап, установленный под приемным столом, привод нагребающих лап выполнен в виде моментных гидроцилиндров, соединенных с валами нагребающих лап и .имеет механизм синхрони зации. Причем последний выполнен в виде звездочек, жестко соединенных с вала ми нагребающих лап, связанных между собой посредством цепи. Кроме того, механизм синхронизации выполнен в виде шестерен, жестко соединенных с валами нагребающих лап связанных между собой посредством зу чатой рейки. На чертеже изображен погрузочный орган, вид сверху. Погрузочный орган непрерывного действия включает приемный стол 1-, конвейер 2, приводимый в действие электродвигателем, расположенным в хвостовой части конвейера, нагребающие лапы 3, моментные гидроцилинд ры 4, расположенные под приемным сто лом. Штоки гидроцилиндров жестко соединяются с ведущими валами 5, про ходящими через приемный стол, и на них установлены нагребанлцие лапы. Лапы в поперечном сечении выполняются клинообразной формы, так что ст.орона, обращенная к конвейеру, выполняется вертикальной, а противоположная имеет криволинейную форму. Синхронизация работы нагревающих лап осуществляется посредством связи ведущих валов между собой цепной клиноременной либо зубчато-реечной передачами. Погрузочный орган непрерывного действия работает следующим образом При внедрении погрузочного органа в штабель запускаются в работу нагребающие лапы посредством подачи рабочей жидкости в полости моментных гидроцилиндров. Нагребающие лапы совершают качательное движение. При этом одна лапа движется в сторону конвейера и своей вертикальной стороной осуществляет нагребание порции материала, другая лапа движется в противоположную сторону и своей клиновидной стороной проходит через материал. Когда лапы займут крайнее положение, потоки рабочей жидкости будут направлены в другие полости моментных гидро-, цилиндров. Цикл работы повторится с тем отличием, что лапа, которая двигалась в сторону конвейера, будет теперь двигаться от него и своей клиновидной стороной проходить через материал, находящийся на приемном столе.Другая лапа будет осуществлять нагребание порции материала на конвейер, т.е. двигаться в сторону конвейера. Применение изобретения обеспечивает повышение производительности погрузочного органа с нагребающими лапами. Формула изобретения 1.Погрузочный орган-непрерывного действия, включающий приемный стол, конвейер, нагребающие лапыд установленные на валах с возможностью возвратно-поворотного движения, и привод нагребающих лап, установленный под приемным столом, о т л ичающийся тем, что, с целью повышения производительности, привод нагребающих лап выполнен в виде моментных гидроцилиндров, соединенных с валами нагребающих лап и имеет механизм синхронизации. 2.Погрузочный орган по п.1, отличающийся тем, что, механизм синхронизации выполнен в виде звездочек, жестко соединенных с валами нагребающих лап, связанных между собой посредством цепи. 3.Погрузочный орган по п.1, о т л и .4 а ю щ и и с я тем, что механизм синхронизации выполнен в виде шестерен, жестко соединенных с валами нагребающих лап, связанных между собой посредством зубчатой рейки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 600307, кл. Е 21 F 13/00, 1975. . 2.Авторс{сое свидетель ство СССР по заявке № 2645396,кл.Е 21 F 13/02, 1978 (прототип}.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган погрузочной машины непрерывного действия | 1981 |
|
SU981626A1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| Погрузочный орган непрерывного действия | 1980 |
|
SU934060A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |
| Погрузочный орган горной машины | 1984 |
|
SU1218149A1 |
| Погрузочный орган непрерывного действия | 1978 |
|
SU665104A1 |
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| Погрузочная машина | 1980 |
|
SU918446A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1990 |
|
RU2022894C1 |
| Погрузочный орган непрерывного действия | 1981 |
|
SU973872A1 |