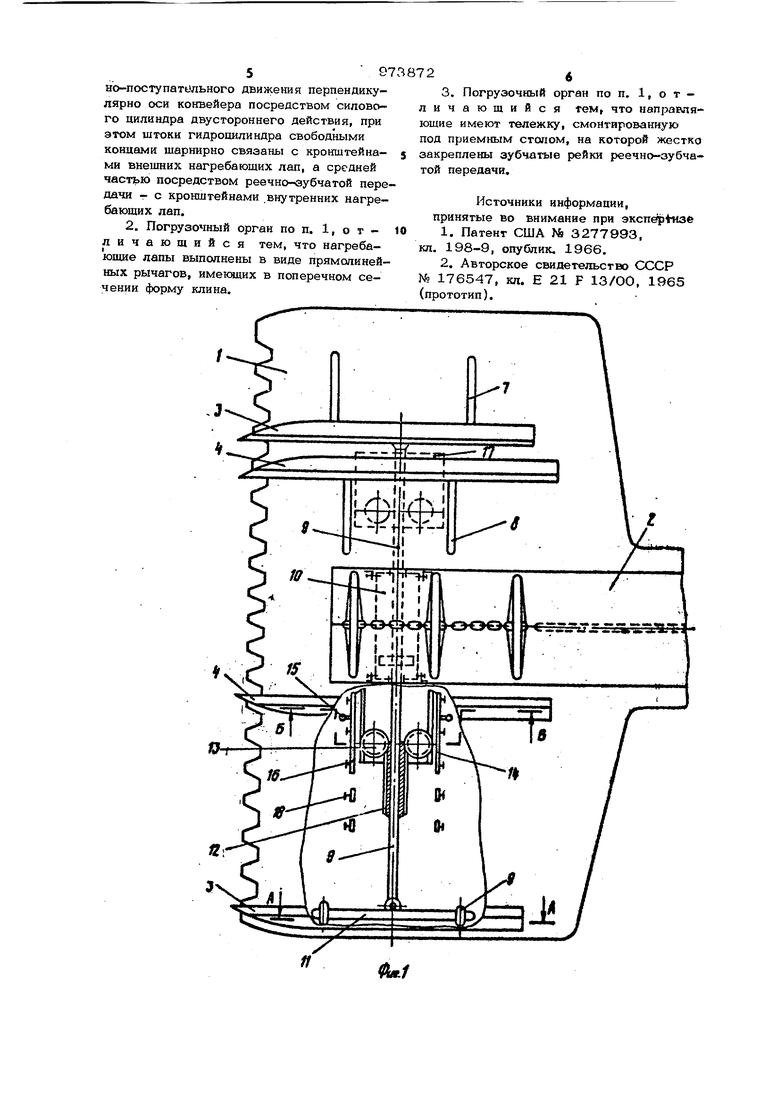
гружен на конвейер и длительное время находится внутри треугольника, создавая дополнительную нагрузку на приводной механизм. Целью изобретения является упроше- mie конструкции погрузочного органа. Поставленная цель достигается тем, что у погрузочногооргана непрерывного действия, включающего приемный стол, на котором установлены внутренние и внеш- ние нагребающие лапы и размешенный между HnNffl кo шeйep, приемный стол снаблшн направляющими с крошитейнами, в верхней части которых закреплены на гребающие лапы, установленные с возмож костью синхронного возвратно-поступательного движения перпендикулярно оси конвейера посредством силового цилиндра двустороннего действия, при этом што ки гидроцилиндра свободными концами шарнирно связаны с кронштейнами внешних нагребающих лап, а средней частью посредством реечно-зубчатой передачи - с кронштейнами .внутренних нагребающих Кроме того, нагребающие лапы выполнены в виде прямолинейных рычагов, имеющих в поперечном сечении форму клина. При этом направляющие могут иметь тележку, смонтированную под приемным столом, на которой жестко закреплены зубчатые рейки реечно-аубчатой передачи На фиг. 1 изображен погрузочный орган непрерывного действия; на фиг. 2 - внешняя нагребающая лапа, продольное сечение по оси; на фиг. 3 - внутренняя нагребающая лапа и ось зубчатого колеса синхронизатора, сечение по оси. Погрузочный орган непрерывного действия включает приемный стол 1, конвей ер 2, внешние 3 и внутренние 4 нагреба клдие лапы, укрепленные на кронштейнах 5 и 6, перемещающихся в направляюших 7 и 8 приемного стола. Штоки 9 гидрооияиндра 10 шарнирно соединены с рычагами 11, на концах которых укреплены кронштейны 5 внешних нагребающих лап. На штоках 9 неподвижно укреплены ведущие зубчатые рейки 12, которые через зубчатые колеса 13 связаны с ведомыми зубчатыми рейками 14, укрепленными на тягах 15, соединяющих кронштейны 6 внутренних нагребающих лап. Tscra 15 вместе с ведомыми зубчатыми рейками 14 и направляющими 16 образуют тележку 17, которая перемешается по роликам 18, укрепленным под наклонной плитой. Погрузочный орган непрерывного действия работает следующим образом. В процессе внедрения погрузочного органа в штабель внешние нагребающие лапы 3 под действием силы тяги гидроцилиндра 10 поступательно перемешаются. При этом лапа движется в сторону конвейера 2 и своей вертикальной стороной сдвигает в область работы внутренней нагребающей лапы 4 оордию материала. Через синхронизатор реечно-зубчатого типа усилие от гидроиилиндра Ю посредством ведущих зубчатых реек 12 через зубчатое колесо и ведомую зубчатую рейку передается внутренней нагребающей лапе 4, которая при этом движется от конвейера 2 навстречу внешней нагребающей лапе 3. Вследствие клиновидной формы поперечного сечения лапы материал перетекает.через внутреннюю нагребаюшую лапу 4 в сторону конвейера 2. Таким образом, внутренняя и внешняя нагребающие лапы движутся навстречу друг другу. Другая пара нагребающих лап в это время движется в противоположные Стороны. Причем внешняя нагребающая лапа 3 движется от конвейера 2, а внутренняя 4-3 сторону конвейера, перемещая своей вертикальной стороной материал на конвейер 2. Дойдя до крайних точек, гидроцилиндр 10 изменяет направление перемещения нагребающих лап на обратное. Цикл работы повторяется. Погрузочный орган непрерывного действия позволяет разместить механизмы привода и изменения фронта погрузки под приемной плитой, осуществлять регулировку фронта погрузки путем изменения длины штока гидроиилиндра, в целом упростить конфигурацию вследствие исключения из нее двигателя, редукторов, кривошипных дисков, подшипниковых узлов и соединительных муфт. Формула изобретения 1. Погрузочный орган непрерывного действия, включающий приемный стол, на котором установлены внутренние и внешние нагребающие лапы и размещенный между ними конвейер, отличающийся тем, что, с целью упрошения конструкции погрузочного органа, приемный стол снабжен направляющими с кронштейнами, в верхней части которых закреплены нагребающие лапы, установленные с возможностью синхронного возвратно-поступатьльного движения перпендикулярно оси конвейера посредством силового цилиндра двустороннего действия, при этом штоки гидроцилиндра свободными концами шарнирно связаны с кронштейна- ми внешних нагребающих лап, а средней частью посредством реечно-чзубчатой передачи - с кронштейнами .внутренних нагребающих лап.
2. Погрузочный орган по п. 1, о т личающнйся тем, что нагребающие лапы выполнены в виде прямолинейHbtx рычагов, имеющих в поперечном сечении форму клина.
3. Погрузочный орган по п. 1, о т личающийся тем, что направляющие имеют тележку, смонтированную под приемным столом, на которой жестко закреплены зубчатые рейки реечно-зубчатой передачи.
Источники информации, принятые во внимание при экспе/р изе
1.Патент США № 3277993, кл, 198-9, опублик, 1966.
2.Авторское свидетельство СССР № 176547, кл. Е 21 F 13/00, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный орган непрерывного действия | 1981 |
|
SU983285A1 |
| Погрузочный орган непрерывного действия | 1980 |
|
SU934060A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1990 |
|
RU2022894C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 2014 |
|
RU2560013C1 |
| Погрузочная машина с нагребающими лапами | 1981 |
|
SU977829A1 |
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| Погрузочный орган горной машины | 1977 |
|
SU748015A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| Погрузочный орган горной машины | 1984 |
|
SU1218149A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |

//
Фиг.г
