1
Изобретение относится к электро- технике, а именно к области автоматизированного электропривода, преимущественно тягового частотнорегулируемого электропривода с асинхронными электродвигателями и индивидуальными преобразователями частоты.
Известны многодвигательные приводы, содержащие устройства вырав- Ю низания нагрузок (токов) параллельно включенных вентилей посредством электромагнитных анодных делителей. Известны электроприводы и установки электроснабжения, в j которых используются параллельно соединенные элементы - электрОДвигатели и выпрямительные устройства (диоды и тиристоры)1.Для обеспечения равномерного распределения 20 нагрузок этих элементов в указанных устройствах используются системы автоматического выравниваний
нагрузок по типу анодных делителей.
Приводы такого типа содержат 25 мощные электромагнитные устройства трансформаторного типа на полный ток ,нагрузки. Точность выравнивания зависит от величины исходной неравномерности нагрузок и недо- ЗО
статочна при большой ее величине. Вес выравнивающего устройства, являющегося дополнительным элементом в приводе , составляет Ьт 1/6 до 1/3 суммарного веса привода, что существенно утяжеляет привод и снижает его КПД вследствие протекания по устройству нагрузочных токов.
Известен многодвигательный частотнорегулируеьллй электропривод, содержащий ансинхронные двигатели, связанньге с источником питания посредством преобразователей частоты с индивидуальными задатчиками частоты, систему автоматического управления частотой, измерители нагрузок двигателей и автоматический регулятор выравнивания 2} . Это устройство
является наиболее близким к изобретению по технической сущности и достига.емому результату. ЙедЬстатком описанного привода является неавтономность двух каналов регулирования САР,- генератора и преобразователей и,таким образом,завязка системы выравнивания нагрузок с оснойной системой автоматического регулирования привода, что ведет к неблагоприятному характеру протеКаНИЯ переходных процессов и к необходимости стабилизации САР, как это имеетместо в приводах постоянного тока.
Целью настоящего изобретения является улучшение параметров переходных процессов и упрощения привода.
Указанная цель достигается тем, что автоматический регулятор выравнивания содержит группу блоков выравнивания и сумматоров и выполнен в виде последовательно соединенных каскадов,каждый из которых содержит блок выравнивания, входы которого связаны с двумя измерителями нагрузки двигателей, а йыходы - с входами двух сумМаторов, связанных с задатчиками частоты тех же двигателей, а другими входами указанные сумматоры соеинены с выходами сумматоров послеующих каскадов,а входы сумматоров последнего каскада соединены с системой автоматического управления частотой, а также тем, что сумматоры одного каскада выполнены многовходовыми и связаны с выходами блоков выравнивания всех каскадов и с выходом системы автоматического управления частотой. .
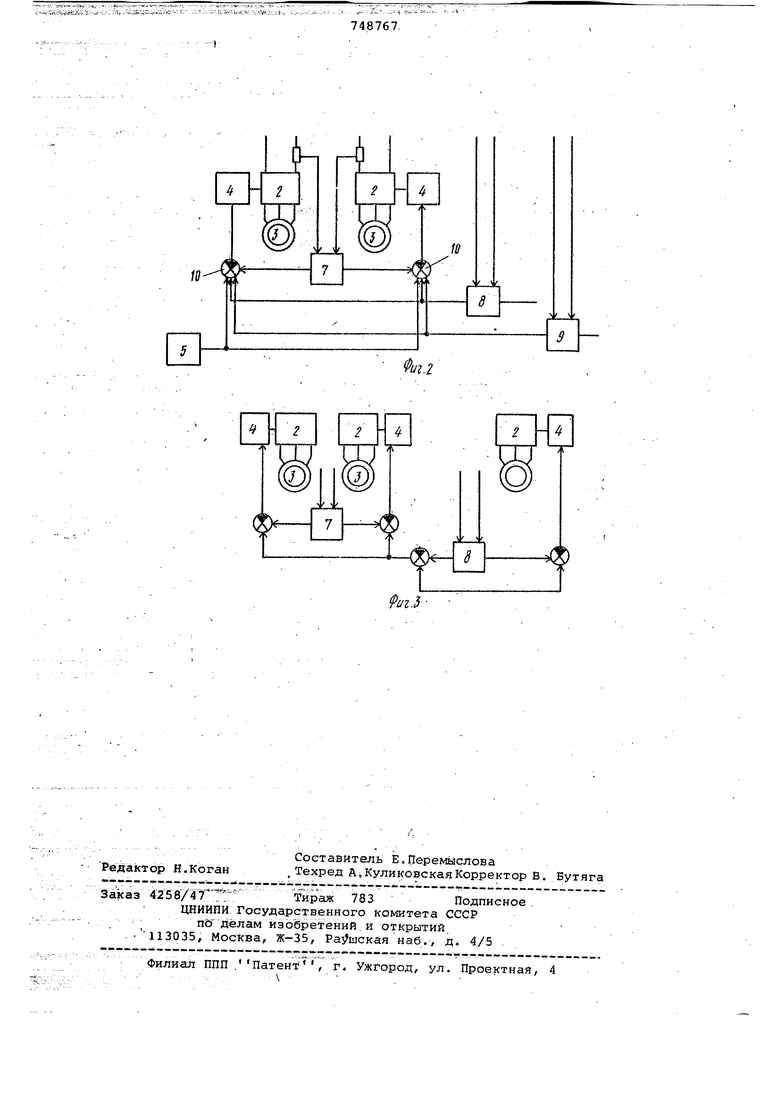
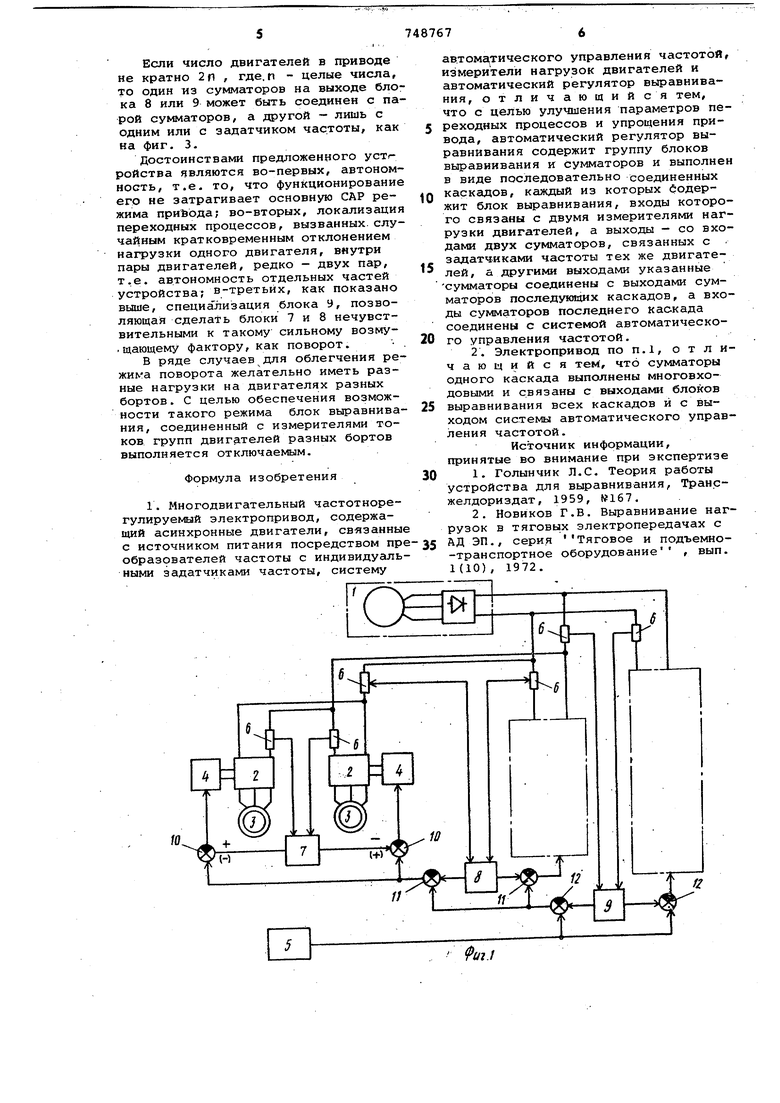
На фиг. 1 изображена схема приода с устройством выравнивания нагрузок двигателей. Пунктиром обозначены части , аналогичные показанной слева; на фиг. 2 - схема с многовходовым сумматором. Изображена часть схемы относящаяся к паре двигателей; на фиг.З - схема с неСимметричным включением .элементов.
Многодвигательный привод (фиг.1) включает в себя источник питания (например,генератор с выпрямителем)1,преобразователи частоты 2,асинхронные двигатели 3, .задатчкки частоты 4 преобразователей 2, систему З-автомйтйческого управления частотой, измерители 6 нагрузок двигателей 3, соединенные с блоками выравнивания 7,8,9, которые в свою очередь соели-. нены с блоками сумг/шрования 10, 11, 12, причем блок 9 соединен с .измерителями б нагрузок групп двигателей, на частоту которых он воздействует, Блоки 8 и 7 также соединены соответст,венно с измерителями 6 нагрузок тех групп и пар двигателей, на часТ1рту которых они воздействуют. Блоки суммирования 12, кроме того, соед11нены с системой 5 автоматического управления частотой, Устройство работает следуюа им, образом.
Система 5 управления частотой при работе привода формирует сигналзадания частоты, поступающий на сумматоры 12, с-них на суь1маторы 11, с них на. сумматоры 10, ас .них на задатчики 4 частоты преобразователей 2.В отсутствие расхождения нагнагрузок сигналы коррекции на вторые входы сумматоров .10, 11 и 12 не Поступают и поэтому частоты питания .всех двигателей 3 одинаковы. .При возникновении расхождения нагрузок двух двигателей блок 7 формирует по двасигнала коррекции частоты, величина которых пропорциональна разнице входных сигналов, пропорциональных нагрузкам двигателей 3, а знаки противоположны, причем положительный сигнал поступает на выход блока выравниван ия 7, соединенный с сумматором 10 того двигателя, нагрука которого меньше (фиг. 2), частот его увеличивается, увеличивается ег скольжение и нагрузка также увеличивается (а нагрузка перегруженного двигателя снижается) пока не исчезнет разница ними и, следовательно, разница сигналов на входе Ьлока выравнивания 7.
Аналогичный процесс происходит, если нарушилось равновесие сигналов на-входе блоков 8 или 9. При этом переходной процесс, вызванный возникновением расхождения нагрузок, не отличается от переходного процесса при изменении частоты, вызванног например, изменением профиля пути Тягового средства с асинхронным . приводом.
в случае применения в схеме устройства многовходовых сумматоров, например, магнитных усилителей, чис.ло их может быть равно числу преобразователей частоты (фиг. 2). В это случае все сигналы коррекции блоков 7, 8 и 9 и сигнал задания частоты подаются на одни и те же сумматоры В порядке, указанном на фиг. 2.
В случае применения указанного привода на колесном (мотор-колесном) т.яговом средстве (автомобиле, тракторе и т.д.) двигатели объединяются в две группы, в каждую из которых входят АД одного борта. Внутри групп выравнивание нагрузок осуществляется по описанной выше схеме, между группами - тоже; Такое соединение при повороте,когда сигналы коррекции должны существенно, иногда на 50-80%, изменить частоты двигателей разных бортов позволит блокам выравнивания 7 и 8 работать Также, как и в режиме движения по прямой, ликвидируя лишь случайные расхождения нагрузок.- Дополнительную же нагрузку и связанные с ней усложнения -схемы это позволит отнести единственно к блоку 9. Одновременно подобное соединение по.зволит улучшить переходной процесс установления новой частоты,так как на поворот будет реагировать только один блок 9,а не все блоки выравнивания вместе. Если число двигателей в приводе не кратно 2п , где, п - целые числа то один из сумматоров на выходе бло ка 8 или 9 может быть соединен с па рой сумматоров, а другой - лишь с одним или с эадатчиком частоты, как на фиг. 3. Достоинствами предложенного усТ(ройства являются во-первых, автоном ность, т.е. то, что функционировани его не затрагивает основную САР режима приЬода; во-вторых, локализаци переходных процессов, вызванных слу чайным кратковременным отклонением нагрузки одного двигателя, внутри пары двигателей, редко - двух пар, т.е. автономность отдельных частей устройства; Втретьйх, как показано выше, специализация блока У, позволяющая сделать блоки 7 и 8 нечувствительными к такому сильному возму.тающему фактору, как поворот. В ряде случаев для облегчения ре жима поворота желательно иметь разные нагрузки на двигателях разных бортов. С целью обеспечения возможности такого режима блок выравнивания, соединенный с измерителями токов групп двигателей разных бортов выполняется отключаемым. Формула изобретения 1. Многодвигательный частотнорегулируемый электропривод, содержащий асинхронные двигатели, связанные с источником питания посредством пре образователей частоты с индивидуальными задатчиками частоты, систему Ф автома,тического управления частотой, измерители нагрузок двигателей и автоматический регулятор выравнивания, отличающийся тем, что с цел:ью улучшения параметров переходных процессов и упрощения привода, автоматический регулятор выравнивания содержит группу блоков выравнивания и Сумматоров и выполнен в виде последовательно соединенных каскадов, каждый из которых Содержит блок выравнивания, входы которого связаны с двумя измерителями нагрузки двигателей, а выходы - со входами двух сумматоров, связанных с . Зсщатчиками частоты тех же двигателей, а другими выходами указанные сумматоры соединены с выходами сумматоров последующих каскадов, а входы сумматоров последнего каскада соединены с системой автоматического управления частотой. 2. Электропривод по п.1, отличающийся тем, что сумматоры одного каскада выполнены многовходовыми и связаны с выходами блоков выравнивания всех каскадов и с выходом системы автоматического управления частотой. Источник информации, принятые во внимание при экспертизе 1.Голынчик Л.С. Теория работы устройства для выравнивания, Транселдориздат, 1959, №167. 2.Новиков Г.В. Выравнивание нагузок в тяговых электропередачах с Д ЭП., серия Тяговое и подъемнотранспортное оборудование , вып. 1(10), 1972. («./
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный электропривод | 1978 |
|
SU671012A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |