Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе асинхронных электродвигателей в многодвигательных электромеханических системах при работе нескольких электродвигателей на одну технологическую машину, и может быть использовано в быстродействующих следящих и управляемых электроприводах конвейеров, механизмах грузоподъемных кранов в различных областях техники - в автоматике, связи, приборостроении, машиностроении, радиоэлектронике, использующих управляемые электроприводы с высокими техническими и эксплуатационными характеристиками.
В настоящее время внимание разработчиков технологического оборудования акцентируется на использовании для управления исполнительными устройствами технологических процессов многодвигательных электроприводов. Это связано с тем, что при использовании многодвигательного электропривода уменьшается суммарная масса исполнительной части электропривода (двигатель - передаточный механизм) на подвижных частях технологических устройств, уменьшаются динамические нагрузки на механические системы - мультипликаторы момента и зубчатые венцы технологических машин, снижается мощность применяемых электродвигателей, вследствие чего при проектировании и изготовлении технологической машины появляется возможность применить исполнительные устройства с меньшей массой, жесткостью и развиваемым моментом, уменьшаются собственные моменты трения и инерции установки. Все это снижает габариты технологического устройства, его стоимость, повышает надежность работы оборудования.
Вместе с тем, наряду с положительными факторами при использовании многодвигательных электроприводных систем остро встает проблема обеспечения совместной работы электродвигателей при равномерной их загрузке в составе многодвигательного электропривода.
В многодвигательном электроприводе обычно используются электродвигатели одного типа. Реальные значения параметров электродвигателей: моменты и скорости при одинаковых параметрах управляющих сигналов различаются между собой, и, следовательно, будут различаться их механические характеристики. Так как электродвигатели работают на один исполнительный (технологический) механизм, возможно создание таких условий, при которых один электродвигатель будет брать на себя часть нагрузки других электродвигателей при одинаковой номинальной скорости. При достаточно больших различиях в характеристиках ведомый электродвигатель переходит в генераторный режим и полностью отдает свою нагрузку ведущему электродвигателю. Учитывая, что электропривод содержит упругие звенья, колебательность системы в данном случае может достигнуть достаточно больших значений.
Известна двухдвигательная приводная электромеханическая система (см. Приборы и системы. Управление, контроль, диагностика. 2004. №9, стр.35, рис.1.), состоящая из двух электроприводов, каждый из которых включает в себя последовательно соединенные регулятор скорости, замкнутый контур тока, электродвигатель. Эти электроприводы работают на общую нагрузку «Н» со скоростями ω1, ω2 соответственно. Нагрузка «Н», в свою очередь, воздействует на электроприводы моментами Мн посредством суммирования с обратным знаком сигнала, пропорционального моменту нагрузки, с сигналом, пропорциональным развиваемому электроприводом моменту с выхода замкнутого контура тока на блоке суммирования. По обратной связи каждого электропривода приходит сигнал Uoc. Для того чтобы синхронизировать скорость вращения электродвигателей, задание на скорость ведущего электропривода подается пропорционально разности скоростей электродвигателей - ведущего и ведомого, получаемое в соответствии с выражением (1) на блоке суммирования:

где:
Uэс2 - скорректированное задание на скорость;
Uэс1 - нескорректированное задание на скорость;
Uдр - сигнал коррекции с датчика рассинхронизации.
Этот двухдвигательный электропривод имеет систему управления скоростью каждого электродвигателя и соответствующие датчики выходной координаты (скорости) каждого электродвигателя. Данная приводная система позволяет синхронизировать скорость вращения исполнительных электродвигателей. В связи с тем что электродвигатели в двухдвигательном приводе используются одного типа, соответственно, система управления для электродвигателей выбирается одинаковой. Учитывая, что реальные значения параметров автоматизированных электроприводов, входящих в состав двухдвигательного электропривода, часто различаются между собой, различаются и их механические характеристики, что при одинаковых параметрах электродвигателей не обеспечивает одинаковость развиваемых электродвигателями моментов. Последнее обстоятельство может вызвать механические колебания в технологическом механизме и значительные перегрузки электродвигателей по току, в системе возникают дополнительные динамические нагрузки, приводящие к механическому резонансу элементов конструкции электродвигателей и технологической машины, что резко сокращает срок службы электропривода и технологической машины.
Известна также двухдвигательная приводная система (см. Приборы и системы. Управление, Контроль, Диагностика, 2004, № 12, стр.12, рис.3), содержащая два электропривода и общий для каждого электропривода задатчик текущей скорости, а выход каждого электропривода подключен к общей нагрузке «Н». В состав каждого электропривода входят регулятор скорости, замкнутый контур тока, электродвигатель. Для синхронизации скоростей электродвигателей в первый электропривод введены дополнительный сигнал синхронизации Ксинх, умножитель и блок суммирования, во второй электропривод - блок суммирования, а в двухдвигательный электропривод - блок суммирования и интегратор. При этом выход задатчика скорости подключен к первому входу регулятора скорости каждого электропривода, на второй вход которого подается сигнал обратной связи по скорости с выхода электродвигателя. Выход регулятора скорости первого электропривода присоединен к первому входу умножителя, второй вход которого подключен к задатчику сигнала синхронизации. Выход умножителя соединен с последовательно соединенными замкнутым контуром тока, первым входом сумматора и электродвигателем. Выход регулятора скорости второго электропривода подключен к последовательно соединенным замкнутому контуру тока, первому входу сумматора и электродвигателю. Сигнал с выхода электродвигателя первого электропривода суммируется с обратным знаком с сигналом с выхода электродвигателя второго электропривода на сумматоре двухдвигательного электропривода, выходом подключенного ко входу интегратора, выход которого подключен ко второму входу сумматора первого и второго электроприводов. В известном двухдвигательном приводе задача синхронизации скоростей электродвигателей решается обеспечением одинаковости характеристик входящих в двухдвигательный электропривод исполнительных (приводных) электродвигателей за счет выравнивания токов якорных цепей электродвигателей при одинаковой скорости вращения электродвигателей. Одинаковость токов обеспечивается системой подчиненного регулирования, и, чтобы не перегружать электродвигатель с меньшим током, снижается задание на ток двигателя с большим током в I1/I2 раз или, что то же самое, в R1/R2 раз (I1, I2, R1, R2 - соответственно токи и сопротивление якорной цепи первого и второго электродвигателя). В данной двухдвигательной приводной системе электроприводы имеют общее задание на скорость и индивидуальные сигналы обратных связей. Синхронизирующий вал реализован интегральным звеном с жесткостью «С». На это звено приходит сигнал разности скоростей электродвигателей. Выходной сигнал интегрального звена заводится в систему регулирования каждого электродвигателя в значении момента. Данный способ синхронизации значительно увеличивает декремент затухания относительно рассинхронизации. Однако указанная двухдвигательная приводная система имеет следующие недостатки:
а) система обеспечивает одинаковость характеристик по току и требует дополнительной синхронизации входящих в двухдвигательную приводную систему электроприводов по скорости для исключения вышеуказанных колебательных процессов. Согласование электродвигателей по скорости решается за счет введения дополнительного сигнала со значениями Кс=R1/R2;
б) необходимость дополнительного фиксированного сигнала синхронизации, вводимого перед контуром тока, зависящего от значений сопротивлений якорной цепи электродвигателя и, соответственно, от температуры двигателей и окружающей среды. Причем сигнал синхронизации должен подаваться в ведущий электропривод, а электроприводы в практических применениях меняют свое назначение;
в) метод применим только для двухдвигательной приводной системы и не может быть использован для многодвигательного электропривода с тремя и более электродвигателями.
Наиболее близкой по технической сущности и достигаемому техническому результату является многодвигательный электропривод, реализующий способ управления многодвигательным электроприводом по патенту РФ № 2185019, МПК8 Н02Р 5/46, 10.07.2002 г., который предназначен для применения в опорно-поворотных устройствах, а также в рабочих машинах прессовой группы. Многодвигательный электропривод содержит общую массу и n локальных каналов, состоящих из электродвигателя и механической передачи от его вала к общей массе. Задатчик скорости подключен к входу основного регулятора скорости. Выход основного регулятора подключен к входам эталонной модели и к первым входам локальных каналов. Первый выход эталонной модели подключен ко второму входу основного регулятора и первому входу элемента сравнения, на второй вход которого поступает сигнал скорости с выхода общей массы. Выход элемента сравнения подключен к входу дополнительного регулятора скорости, выход которого соединен со вторыми входами соответствующих локальных каналов. Сигнал со второго выхода эталонной модели сравнивается с соответствующими сигналами локальных каналов на соответствующих элементах сравнения, выходы которых подключены ко входам соответствующих локальных регуляторов. Выходы последних подключены к третьим входам соответствующих локальных каналов.
В известной системе синхронизация локальных каналов и их равномерная загрузка обеспечена с использованием упрощенной эталонной модели локального канала не только по выходной, но и по одной из промежуточных координат состояния (току, скорости электродвигателя, упругому моменту) с использованием набора их производных по времени. Для обеспечения синхронизации локальных каналов также используются основной, дополнительный и локальный регуляторы.
Основной регулятор на основе сигнала задатчика и выходного сигнала эталонной модели и его производных формирует управляющее воздействие на электроприводы локальных каналов. При появлении отклонений выходных координат от заданной траектории дополнительный регулятор или локальные регуляторы формируют дополнительные управляющие воздействия на локальные каналы, устраняющие данные отклонения.
Недостатками известного многодвигательного электропривода является наличие одной эталонной модели локального канала, дополнительных регуляторов, вычисление и использование для обеспечения параметров первой и старших производных по времени выходной координаты, формирование основного и дополнительного управляющих воздействий с учетом сигналов, получаемых с эталонной модели. Основной, дополнительный и локальный регуляторы выполнены в виде дифференцирующих звеньев. Их синтез ведется методами полиноминальной алгебры на основе диофантовых уравнений. Известная многодвигательная приводная система сложна в реализации, требует высококвалифицированных специалистов для проведения расчетов регуляторов и их наладке при практических применениях. Наличие первой и старших производных предъявляет повышенные требования к помехозащищенности системы и приводит к нестабильности характеристик многодвигательного электропривода в процессе эксплуатации. В условиях многодвигательного электропривода, когда требуется одинаковость выходных координат всех локальных каналов и их равенство скорости общей массы, использование эталонной модели локального канала для формирования требуемых для синхронизации электроприводов управляющих воздействий в предположении одинаковости локальных каналов не может обеспечить синхронизации локальных каналов вследствие различия механических и динамических характеристик электроприводов, входящих в состав многодвигательного электропривода.
Вышеперечисленное приводит к существенному ухудшению всех показателей качества системы управления. В связи с использованием первой и старших производных сохраняется высокая чувствительность многодвигательного электропривода к вариациям параметров локальных каналов и в итоге не обеспечивается требуемая загрузка электроприводов локальных каналов и их синхронизация.
Задачей предлагаемого технического решения является обеспечение выравнивания нагрузки и синхронизация скоростей в многодвигательном электроприводе при механической связи валов электродвигателей через передаточный механизм на общей нагрузке и создание на этой основе многодвигательного электропривода с двумя и более исполнительными электродвигателями, а также повышение надежности работы технологического оборудования за счет выравнивания нагрузок между электродвигателями локальных электроприводов и исключения колебательных и резонансных явлений в механической системе локальных электроприводов, связанных с совместной работой электродвигателей.
Решение указанной задачи достигается за счет того, в многодвигательном частотно-регулируемом электроприводе, включающем n одинаковых по мощности локальных электроприводов, работающих на общую нагрузку, каждый из которых включает электродвигатель, передаточный механизм, датчик скорости вращения ротора электродвигателя, установленный на электродвигателе или в передаточном механизме, а также последовательно соединенные задатчик текущей угловой скорости и регулятор скорости вращения многодвигательного электропривода, в качестве электродвигателей и датчиков скоростей используют соответственно асинхронные электродвигатели и импульсные датчики, причем импульсные датчики имеют два выхода по углу поворота и по скорости. Кроме того, в каждый локальный электропривод введены последовательно соединенные блок векторного управления момента электродвигателя и силовой преобразователь, выход которого подключен к обмоткам управления асинхронного электродвигателя. В многодвигательный электропривод также введен осреднитель скоростей локальных электроприводов. При этом в каждом локальном электроприводе первый вход блока векторного управления момента электродвигателя соединен с выходом регулятора скорости вращения многодвигательного электропривода, а второй вход с выходом импульсного датчика по углу поворота. Выход импульсного датчика по скорости всех локальных электроприводов соединен с входом осреднителя скоростей локальных электроприводов, выход которого соединен со вторым входом регулятора скорости вращения многодвигательного электропривода.
Осреднитель скорости локальных электроприводов, вырабатывающий общий сигнал обратной связи по скорости многодвигательного электропривода, является синхронизатором скоростей вращения локальных электроприводов и может включать в себя последовательно соединенные блок суммирования на n входов по числу локальных электроприводов и блок деления с делителем, равным числу локальных электроприводов. Выходом осреднителя скорости локальных электроприводов является выход блока деления.
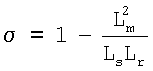
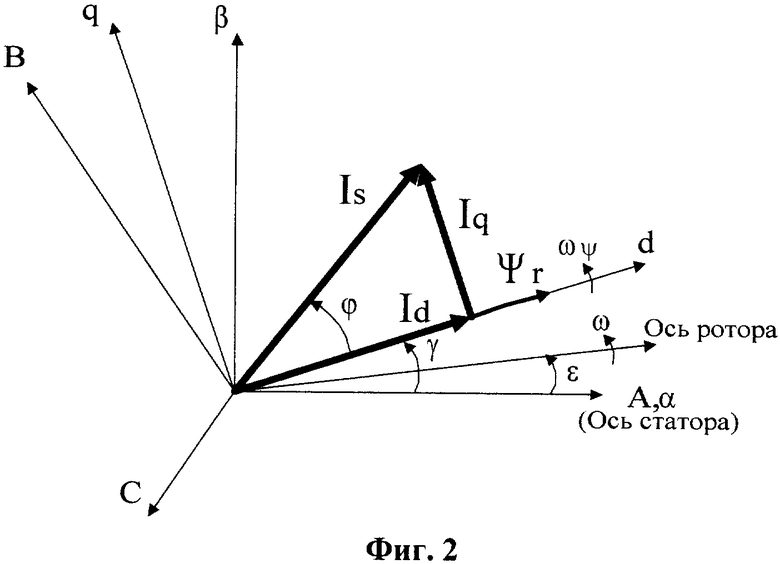
В качестве иллюстрации на фиг.1 приведена функциональная схема предлагаемого многодвигательного частотно-регулируемого электропривода; на фиг.2 - векторная диаграмма, поясняющая принцип ориентации системы координат по вектору потокосцепления ротора электродвигателя; на фиг.3 - диаграмма распределения механических нагрузок многодвигательного электропривода.
Многодвигательный частотно-регулируемый электропривод состоит из двух и более одинаковых по мощности локальных электроприводов 1, работающих на общую нагрузку «Н» 2. Каждый локальный электропривод 1 содержит асинхронный электродвигатель 3, обмотки которого подключены к выходу соответствующего силового преобразователя 4, блок векторного управления моментом электродвигателя 5, связанный с валом асинхронного электродвигателя 3, передаточный механизм - мультипликатор момента 6, импульсный датчик угловых перемещений 7, установленный в передаточном механизме 6 или на валу исполнительного электродвигателя 3 локального электропривода. Кроме этого, многодвигательный частотно-регулируемый электропривод содержит задатчик текущей угловой скорости 8 многодвигательного электропривода, регулятор скорости вращения 9 электродвигателей, осреднитель скоростей 10 локальных электроприводов 1, включающий блок суммирования 11 на n входов по числу локальных электроприводов и блок деления 12 с делителем, равным числу локальных электроприводов. Выходом осреднителя скорости 10 локальных электроприводов является выход блока деления 12.
Все используемые составные части системы многодвигательного частотно-регулируемого электропривода являются известными либо могут быть получены из известных устройств путем их объединения известными методами.
Блок векторного управления моментом электродвигателя 5 может содержать регулятор тока асинхронного электродвигателя, датчики токов, вычислитель токов, блок ШИМ, усилитель импульсов. Сигналы обратной связи по моменту вычисляются по сигналу с импульсного датчика 7. Силовой преобразователь 4 содержит выпрямитель напряжения сети, сглаживающий фильтр, автономный трехфазный инвертор напряжения. Функциональная схема и работа блока векторного управления моментом 5 асинхронного электродвигателя 3 и силового преобразователя 4 приведены и описаны в [1, 2]. Блок векторного управления моментом 5 асинхронного электродвигателя 3 может быть выполнен на базе известной микросхемы IRMCK 2031S, которая обеспечивает аппаратно-программную реализацию основных устройств системы векторного регулирования момента и скорости асинхронного электродвигателя. IRMCK 2031S включает в себя вычислительное ядро, выполненное на базе быстродействующего сигнального процессора, с развитой системой периферийных устройств: центрированная пространственная векторная ШИМ сигнала управления асинхронным электродвигателем, аналого-цифровое и цифроаналоговое преобразование входных и выходных сигналов, интерфейс для обработки сигналов импульсных датчиков с выдачей сигналов по углу и по скорости, интерфейс связи с силовым модулем блока регулирования момента, связь с управляющей ЭВМ верхнего уровня по последовательному порту RS 232, вывод информации на дисплей (параметры процесса управления электродвигателя и электропривода). Использование IRMCK 2031S с учетом заложенных в микросхеме частот опроса параметров управления и частоты ШИМ позволяет реализовать систему управлению многодвигательным электроприводом соответственно с новым уровнем технических характеристик. Работа IRMCK 2031S подробно описана в [3].
Основные характеристики импульсного датчика 7, его функциональная схема, эпюры выходных напряжений, рекомендации по применению представлены в [4].
Блоки суммирования 11 и деления 12 могут быть реализованы на аналоговой или цифровой элементной базе как это описано в [5, 6]. Регулятор скорости вращения 9 электродвигателей может быть построен при известных требованиях к динамическим характеристикам контура локального электропривода в соответствии с правилами, изложенными в [7], а аппаратная реализация регулятора может быть выполнена в соответствии с рекомендациями [8].
Работа многодвигательного частотно-регулируемого электропривода происходит следующим образом. Многодвигательный электропривод имеет в своем составе n локальных электроприводов 1, построенных на базе частотно-регулируемых асинхронных электродвигателей 3. Каждый асинхронный электродвигатель 3 установлен в передаточном механизме, являющемся мультипликатором момента. Локальные электроприводы 1 работают на общую нагрузку 2 - один технологический механизм Н со скоростями ω1, ω2, ..., ωn. Нагрузка 2 в свою очередь воздействует на локальные электроприводы моментами Мн. Каждый локальный электропривод 1 имеет в своем составе замкнутый контур регулирования момента, датчики обратной связи на базе импульсных датчиков угловых перемещений 7 с блоком обработки импульсных сигналов и выработкой сигналов, пропорциональных скорости вращения и углу перемещения вала исполнительного электродвигателя локального электропривода. Обратная связь контура регулирования скорости многодвигательного электропривода вычисляется по сигналам скорости с импульсного датчика 7 каждого асинхронного электродвигателя 3 в осреднителе 10, где сигналы импульсных датчиков 7 вначале суммируются в сумматоре 11, затем поступают на блок деления 12. После деления на делитель, равный числу локальных электроприводов, вычисленный сигнал обратной связи многодвигательного электропривода поступает на один из входов регулятора скорости вращения 9 многодвигательного электропривода. На другой вход регулятора скорости вращения 9 поступает сигнал с задатчика текущей угловой скорости 8 многодвигательного электропривода. После сравнения сигналов и соответствующей динамической коррекции разностный сигнал с выхода регулятора скорости вращения 9, являющийся заданием момента Мз, поступает одновременно на первые входы всех блоков векторного управления моментом 5 соответствующего электродвигателя 3 локальных электроприводов 1, на вторые входы которых поступает сигнал обратной связи по углу со второго выхода соответствующих импульсных датчиков 7 перемещений вала асинхронного электродвигателя 3. В блоке векторного управления моментом 5 по сигналу, пропорциональному угловому перемещению вала асинхронного электродвигателя 3, с импульсного датчика перемещений 7 и по параметрам электродвигателя, замеренным датчиками момента, происходит вычисление сигнала обратной связи по моменту.
Блок векторного управления моментом 5 асинхронного электродвигателя 3 осуществляет регулирование момента на основе базовых принципов взаимосвязанного векторного способа регулирования основных электромагнитных переменных асинхронного электродвигателя. Векторный способ управления обеспечивает непосредственное управление вращающим моментом асинхронного электродвигателя. Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При таком методе управления, кроме амплитуды статорного тока, изменяется также его фаза, т.е. вектор тока. Векторный способ управления электродвигателем обеспечивает диапазон регулирования 1:1000 и выше, при этом точность регулирования по скорости - сотые доли процента, по моменту - десятые доли процента. Блок векторного управления 5 обеспечивает практически безынерционное высокоточное регулирование момента. Полоса контура регулирования момента составляет 100-300 Гц, точность регулирования момента 0.01-0.02% от текущего значения момента. Подробно векторный способ регулирования параметров асинхронного электродвигателя описан в [9], работа контура регулирования момента описана в [2].
Описание структурной схемы моментного контура системы векторного управления асинхронным электродвигателем 3 для многодвигательного электропривода представлено ниже. Из теории векторного управления асинхронным электродвигателем известно, что наиболее простой в структурном исполнении и в то же время наиболее эффективной по перегрузочной способности и динамическим характеристикам электропривода является система векторного управления с ориентацией по вектору потокосцепления ротора асинхронного электродвигателя. Такая ориентация (фиг.2) позволяет раздельно управлять потокосцеплением и электромагнитным моментом асинхронного электродвигателя в каналах регулирования реактивной (Id) и активной (Iq) составляющих тока статора. Электромагнитные уравнения асинхронного электродвигателя, записанные относительно тока статора и потокосцепления ротора в ортогональной системе координат (d, q), ориентированной по вектору потокосцепления ротора (Ψrq=0; Ψrd=Ψr), при допущении о симметрии электромагнитной системы асинхронного электродвигателя, отсутствии насыщения, потерь в стали, влияния пазов и высших пространственных гармоник поля, имеют вид:
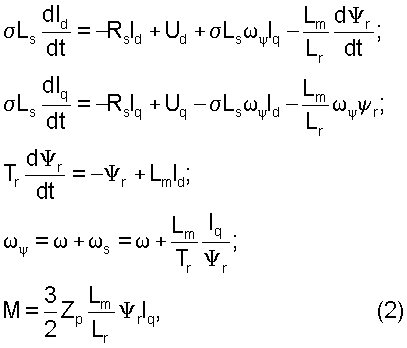
где:
Rs, Rr - активные сопротивления фаз статора и ротора;
Ls, Lr, Lm - индуктивности фаз статора, ротора, взаимная;
 - коэффициент рассеяния;
- коэффициент рассеяния;
 - постоянная времени роторной цепи;
- постоянная времени роторной цепи;
Ud, Uq, Id, Iq - проекции векторов напряжения и тока статора на оси d и q;
ωψ - частота вращения вектора потокосцепления ротора;
ω=Zpωr - электрическая частота вращения ротора;
ωs - частота скольжения.
Система управления контуром момента асинхронного электродвигателя построена в синхронной системе координат (d, q). Это позволяет, во-первых, устранить дополнительную вычислительную погрешность, возникающую не только в динамических, но и в установившихся режимах работы локального электропривода в связи с наличием переменной составляющей в сигналах системы управления, реализованной в неподвижной системе координат; во-вторых, применить в контуре момента хорошо известные ПИ-регуляторы составляющих тока статора в цифровом исполнении и оптимизированный по энергетическим характеристикам локального электропривода центрированный алгоритм модуляции выходного напряжения инвертора; в-третьих, ориентировать техническое воплощение системы управления на специально разработанный для целей векторного управления асинхронным электродвигателем контроллер IRMCK 201 [3], что существенно упрощает и удешевляет процесс разработки, так как большинство элементов системы управления входят в программное обеспечение IRMCK 201 в виде стандартных приложений, а его архитектура оптимизирована под решаемые задачи.
В частном случае структурная схема контура асинхронного электродвигателя с векторной системой управления моментом, построенной на основе уравнений (2), может иметь вид, представленный в источниках информации [11] или [12].
Информация о векторе потокосцепления ротора, его модуль Ψr, угловое положение относительно фазы А статора γ и мгновенная частота вращения ωψ, вычисляется в модели роторной цепи, построенной в синхронной системе координат по третьему и четвертому уравнениям системы (2), на основе информации о скорости, положении ротора и проекций вектора тока статора на оси d и q.
Силовой преобразователь 4 координат выполняет преобразование фазных токов статора асинхронного электродвигателя из естественной трехфазной системы координат (А, В, С) в ортогональную синхронную систему координат (d, q) по уравнениям:

Предполагается, что обмотка статора асинхронного электродвигателя соединена в звезду, нулевой провод отсутствует, т.е. выполняется условие: IA+IB+IC=0 и процессы в электродвигателе могут быть адекватно описаны в двухкоординатном базисе.
Преобразователь координат осуществляет обратное преобразование заданных в синхронной системе координат (d, q) напряжений статора асинхронного электродвигателя в неподвижную относительно статора ортогональную систему координат (α, β) по уравнениям:

Модулятор преобразует вектор напряжения статора, заданный в системе координат (α, β), в импульсы управления ключами инвертора напряжения на основе метода пространственно-векторного формирования выходных напряжений инвертора [3]. Реализация данного метода применительно к IRMCK 201 подробно изложена в его техническом описании [3] и входит в стандартный набор его программных средств.
Выходной сигнал с каждого блока векторного управления моментом 5 поступает на управляющие входы соответствующего силового преобразователя 4. В силовом преобразователе 4 осуществляется широтно-импульсная модуляция сигналов управления и усиление сигналов управления, поступающих на обмотки соответствующего асинхронного электродвигателя 3 по мощности.
Особенностью предложенного многодвигательного электропривода и его управляющей системы по сравнению с аналогами и прототипом является не обеспечение одинаковых скоростей исполнительных электродвигателей локальных электроприводов, а создание на выходе каждого из n локальных электроприводов одинакового момента при различии в электромагнитных параметрах и механических характеристик асинхронных электродвигателей. В прототипе для регулирования скорости многодвигательного электропривода для каждого локального канала (локальных электроприводов) используется своя система управления. Однако реальные значения параметров локальных электроприводов многодвигательного электропривода несмотря на одинаковые системы управления часто различаются между собой, и, следовательно, различаются механические характеристики локальных электроприводов. Так как электродвигатели работают на один механизм (на одну нагрузку), для исключения динамических ударов между механической системой локальных электроприводов и нагрузкой требуются специальные устройства для синхронизации работы электродвигателей по моменту и скорости, причем технически удовлетворительное решение в ограниченных условиях применения найдено для двухдвигательного электропривода.
Предложенное техническое решение, включающее использование асинхронных двигателей и специальной системы регулирования момента по количеству локальных электроприводов с векторными способами управления электромагнитных переменных электродвигателя, описанных в [10], и одного регулятора скорости, позволяет получить механические характеристики многодвигательных электроприводов, приведенные на фиг.3, на которой видно, что момент многодвигательного электропривода регулируется заданием, определяется нагрузкой и не зависит от скорости электродвигателей локальных электроприводов. Такое построение системы управления моментом и наличие только одного регулятора скорости для управления скоростью каждого из n электродвигателей локальных электроприводов позволяет использовать в качестве синхронизатора скорости электродвигателей осреднителя скоростей локальных электроприводов, получаемых с высокоточного импульсного датчика перемещений, а осредненный сигнал использовать в качестве сигнала обратной связи по скорости многодвигательного электропривода. При таком вычислении обратной связи точность рассчитанного сигнала с осреднителя должна быть не хуже точности замеренного сигнала скорости вращения электродвигателей или локальных электроприводов.
Таким образом, использование в многодвигательном частотно-регулируемом электроприводе асинхронных электродвигателей, высокоточного импульсного датчика скорости электродвигателей, применение оригинального блока векторного управления моментом для каждого электродвигателя локальных электроприводов и одного регулятора скорости вращения, а также использование осреднителя позволяет осуществить:
- точное регулирование момента каждого локального электропривода в соответствии с заданием, не зависящего от скорости электродвигателя;
- синхронизацию электродвигателей по скорости.
Благодаря перечисленному в сравнении с известным техническим решением решается проблема совместной работы n электродвигателей локальных электроприводов на общую нагрузку в составе многодвигательного электропривода, обеспечиваются более высокие динамические показатели и надежность многодвигательного электропривода за счет повышения точности регулирования момента и применения одного регулятора скорости вращения для регулирования скорости каждого из n электродвигателей локальных электроприводов, обеспечивается возможность создания многодвигательных электроприводов с 2, 3 и более исполнительными локальными электроприводами с высокими показателями точности регулирования момента и скорости, с исключением ударов и динамических перегрузок в выходных механических звеньях технологической машины.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Лебедев A.M., Орлова Р.Т., Пальцев А.В. Следящие электроприводы станков с ЧПУ. М.: Энергоатомиздат. - 1988, 223 с. ил. стр.127, рис.4.4.
2. Александров Е.В. и др. Цифровой векторный алгоритм управления асинхронным моментным приводом. // Техничноелектродинамiка: Тематический выпуск с докладами VII международной конференции «Проблемы современной электротехники» 2002, ПСЭ - 4-6 июня 2002 г. Киев, Украина. - 2002. - С.23-24.
3. IRMCK 201. High Performance Configurable Digital AC Servo Control IC. IR USA. Data Sheet No60224.
4. Преобразователи перемещения. Блоки индикации. Каталог 2001. - С-Петербург, ОАО СКБ «ИС», 2001. - 125 с.
5. Справочник по интегральным микросхемам. М.: Энергия. - 1978.
6. Павлов В.В. Управляющие устройства логического типа. М., Энергия. - 1978.;
7. Бессекерский В.А., Попов Е.П., Теория систем автоматического регулирования. М.: Наука. - 1973 г.
8. Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для АВМ. М.: Энергия. - 1978 г.
9. Novotny D.W. and Lipo T.A. Introduction to Field Orientation and High Performance AC Drives Second Edition / IEE Industry Applications Society Annual Meeting. 1986. Section 2.
10. Поздеев А.Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. - Чебоксары: Из-во Чуваш, ун-та. - 1998 г., 172 с.
11. Колесников К.С., Сидоров П.Г., Александров Е.В., Рывкин С.Е. К созданию многооборотных регулируемых асинхронных электроприводов нового технического уровня. Известия Тульского государственного университета - Тула: Из-во ТулГУ. - 2005 г., стр.5-6, рис.2.
12. David Tam. Integrated Design Platform for Digital Motor Drives. - http://www.irf.com 233 Kansas St, Segundo? California 90245., Fig.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового электропривода | 1979 |
|
SU875571A1 |
Изобретение относится к области электротехники и может быть использовано в электромеханических системах при работе нескольких электродвигателей на общую нагрузку в быстродействующих регулируемых электроприводах конвейеров, грузоподъемных кранах и другой техники, к которой предъявляются жесткие требования к габаритно-массовым и эксплуатационным характеристикам. Техническим результатом является исключение динамических нагрузок на электропривод и исполнительный механизм, возникающих при совместной работе двух и более электродвигателей на общую нагрузку, и повышение надежности и долговечности работы технологического оборудования. В многодвигательном частотно-регулируемом электроприводе содержится n одинаковых по мощности локальных электроприводов, работающих на общую нагрузку. Каждый электропривод включает электродвигатель, передаточный механизм, датчик скорости вращения ротора электродвигателя, задатчик текущей угловой скорости и регулятор скорости вращения многодвигательного электропривода. Электродвигатели выполнены асинхронными, а датчики скорости импульсными. Импульсные датчики имеют два выхода: по углу поворота и по скорости. В каждый локальный электропривод введены последовательно соединенные блок векторного управления моментом электродвигателя и силовой преобразователь, выход которого подключен к обмоткам управления асинхронного электродвигателя. Многодвигательный электропривод снабжен осреднителем скоростей локальных электроприводов. В каждом локальном электроприводе первый вход блока векторного управления моментом электродвигателя соединен с выходом регулятора скорости вращения многодвигательного электропривода, а второй вход с выходом импульсного датчика по углу поворота. Выход импульсного датчика по скорости всех локальных электроприводов соединен с входом осреднителя скоростей локальных электроприводов, выход которого соединен со вторым входом регулятора скорости вращения многодвигательного электропривода. 1 з.п. ф-лы, 3 ил.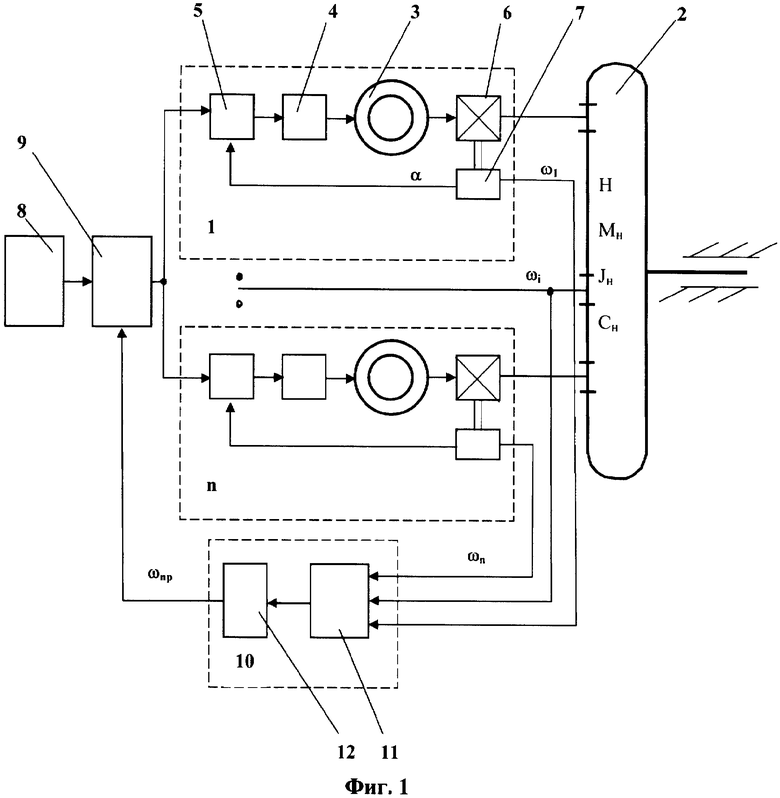
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| ТРЕХФАЗНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2002 |
|
RU2231203C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| Способ управления электромеханической системой,включающей электродвигатели и исполнительный орган,связанные между собой упругими элементами | 1981 |
|
SU983960A1 |
| US 7038405 В2, 02.02.2006 | |||
| ЭКСТРУЗИОННЫЙ ИНСТРУМЕНТ | 2014 |
|
RU2676604C2 |
| DE 3804634 A1, 24.08.1989 | |||
| ЕР 1455438 А2, 03.03.2004 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |

