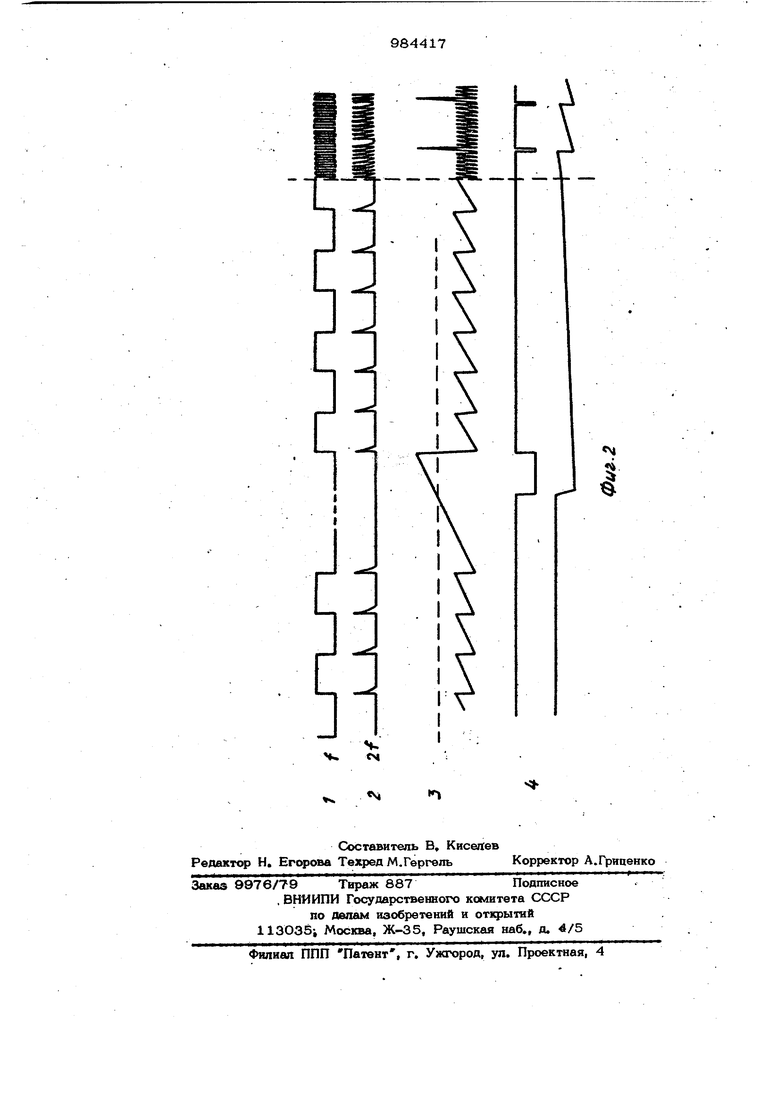
(54) СПОСОБ КОНТРОЛЯ РАБОТЫ ПРЕОБРАЗОВАТЕЛЯ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Изобретение относится к измерительной технике и может быть использовано в системах управления тормозами колес транспортных средств, препятствующих блокировке колес. Известно устройство контроля скорости с импульсным датчиком, формирующее предупредительный сигнал при достаженни скоростью заданного значения I. Однако это устройство не обеспечивает распознавание изменений скорости сле дования импульсов датчика, вызванных разными изменениями скорости колеса и возникакядими в результате повреждений датчика скорости. Известно также устройство для конт роля скорости, в котором осуществляется ф фмирование частотно-икшульсного сигнала скорости, интегрирование сигнала, сравнение проиятегрировавного-сигна ла с опорным и формирование предупреди тельного сигнала. Устройство содержит частотно-импульсный датчик сюрости, соединенный с интегратором, выход кото рого подключен к схеме сравнения, связанной с испохшительным органом . Указанное устройство предназначено для контроля скорости и не может обеспечить высокой точности при контроле работы преобразователей скорости с импульсными датчиками. Целью изобретения является повышение точности и надежности контроля. Поставленная цель достигается тем, что импульсный сигнал преобразунэг в аиалоговый и интегрируют этот аналого- вый сигнал в течение времени, определяемого длительностью каждого импульса скорости, При достижеиии аналоговым сигиалок заданного порогового уровня, опреде ляемого Нижним пределом контролируемой скорости, прекращают формирование предупредительного сигнала. В предлагаемое устройство введен дискретно-аналоговый преобразователь, включенный между выходом датчика скорости и вторым входом интегратора. го предела скорюсти установлен между выходом дискретно-аналогового преобразователя и входом интегратора. На фиг. 1 представлена структурная схх.ема системы управления тормозами с устройством для контроля работы преобра зователя скорости; на фиг. 2 - времен- Hbie диаграммы, иллюстрирующие работу устройства. Способ контроля работы преобразовате ля скорости заключается в следующем. , Препятствующие блокировке колес системы управления тормозами детектируют надвигающиеся состояния блокировки колес путем воспринимания соответствующего падения скорости вращения колес и реагируют отпусканием тормозов так, чтобы скорость вращения колес могла восста навливаться. В быстродействующих системах измерительные преобразователи скорости вращения колес реагируют на такое быстрое падейие скорости вращения колес которое получается в течение двух или трех импульсов импульсного сигнала изме рительного преобразователя. Однако эта высокая чувствительность может затем приводить к опасной ситуации, в которой периодические неправильные срабатыва- ния в измерительном преобразователе интерпретируются в качестве падения скорости вращения колес и отпускаются тормоза. Например, если измерительный преобразователь имеет ротор с последователь ным рядом зубцов, которые формируют импульсы, и одун или более из зубцов искривляется, ломается или пропускается, один или более из импульсов будут пропускаться на один оборот, в силу чего бу-; дет образовываться сигнал измеритель-: ного преобразователя с периодическими изменениями, которые могут служить причиной повторяемого отпускания тормо- зов, возможно, ведущего к полной потере тормозного давления. Для устранения влияния указанного явления на работу антиблокировочного устройства импульсный сигнал скорости преобразуют в сигнал в течение времени действия каждого импульса скорости, и 1гри превыщении проинтегрированным сигналом заданного значения (что может произойти при пропуске импульсов скорости ) формируют предупредительный сигнал. Система управления тормозами содер жит два измерительных преобразователя 1 скорости (частотнО ИМпульсных аатчи- ка), соединенных через усилители 2, и с антибл;окировочным процессором 4, выход которого через усилитель 5 и блок 6 управления соединен с соленоидом 7 управлени51 тормозами. К выходам усилителей 2 подключены дифференцирующие схемы 8, соединенные со входами интеграторов 9. Вторые входы интеграторов подключены к выходам преобразователей 3, а их выходы через вентиль 10, схему 11 сравнения и схему 12 задержки к блоку 13 измерения временного интервала, соединенную также с выходом процессора 4. Между выходами преобразо- вателей 3 и входами интеграторов 9 установлены детекторы 14 нижнего предела скорости. Устройство работает следующим образом. Имгульсный сигнал от каждого измерительного преобразователя 1 (фиг% 2-1) усиливается в усилителе 2 и преобразуется в аналоговый сигнал скорости в дис. кретно-аналоговом преобразователе 3 подачей к антиблокировочному продессору 4. Процессор 4 анализирует сигнада, скорости вращения колес, чтобы детектировать зарождающиеся состояния блоки- ровки и образовать I соответствующий сигнал отпускания тормозов, который возбуждает соленоид, чтобы осуществлять отпускание тормозов. Им 1ульсный сигнал прямоугольной формы от каждого измерительного преобразователя также подается к соответствующей дифференцирующей схеме 8, которая образует заостренный импульс на каждом переходе входных импульсов, в силу этого образующих последовательность импульсов сброса (фиг. 2-2) при удвоенной частоте исходного импульсного сигнала.. Эти импульсы сброса подаются к соответствукядей интегрирующей схеме 9, чтобы управлять последсфательными операциями интег эирования между импульсами. Сигнал, 1соторый интегрируется, представляет собой аналоговый сигнад скорости от преобразователя 3. В результате операции интегрирования интегратор 9 образует равномерно возрастающее выходное напряжение (фиг.2-3) в форме пилообразного напряжения перед возвращением обратно к нулю следующим импуиьсом сброса, в силу чего йнтегра,р образует пилообразный выходной сигнал лри нормальных ходовых условиях. Ес,ли воспринимаемая скорость падае, про мёжуток времени периода импульсов Т продошкительные отрезки времени интегри рования, однако при условии, что падение скорости не является мгновенным, это сопровождается аналоговым сигна- лом скорости так, что амплитуда пилообразного выходного сигнала интегратора, по существу, остается постоянной. Однако прерывания в импульсном сиг нале измерительного преобразователя, которые вызываются пропадающим импульсом, создают более продолжительный про межуток времени интегрирования, который не сопровождается падением в аналоговом сигнале скорости. Таким образом повышается выходное напряжение ин тегратора. В случае пропадающего импульса теряются два импульса сброса и. таким образом, промежуток времени, интегрированный внезапно, утраивается и соответственно утраивается амплитуда пилообразного выходного сигнала. Схема 11 сравнения (компаратор) при нимает выходные сигналы от, обоих интеграторов 9 через вентиль 10 и устанавливается в отпирающее состояние выходным сигналом, превышающим предопре деленный порог (фиг. 2-3), соответствующий пределу нормальных ходовых состояний. Таким образом, пропадающий импульс вынуждает компаратор 11 отпираться в то время, когда превышается порог, и образовывать выходной импульс (фиг. 2-4), который, в свою очередь образует растянутый импульс в схеме 12 задержки (фиг. 2-5). Выход схемы за держки соединяется с сохраняющим работоспособность при отказе отдельных элементов блоком 13 измерения временного интервала, который формирует сигнал неправильного срабатывания, чтобы запретить дальнейшее отпускание тормозов, Таким образом, данная система реагирует только на неправильные срабатывания измерительного преобразователя, которые появляются периодически в течение минимального времени уточнения, устанавливаемого сохраняющим работоспособность при отказе отдельных элементов блоком 13.. При низких скоростях выходной сигнал интегратора 9 благодаря отклонению регулирования преобразователя 3 н дрейфу интегратора может меняться, давая в результате образование ложных сигналов .неправвльногр срабатывания. Для исключения подобных явлений работа интегратора запрещается ниже предопределенной малой скорости с помощью детектора 14 аналоговый сигнал скорости и реагирует на скорости ниже упомянутой предопределенной низкой скорости подачей импульса к интегратору, чтобы удерживать его в исхоДН(Я«1 состоянии. Формула изобретения 1,Способ контроля работы преобразователя скорости, включающий формирование импульсного сигнала, частота которого пропорциональна скорости, интегрирование сигнала, сравнение проинтегрированного сигнала с опорным и формирование предупредительного сигнала, отличающийся тем, что, о целью повышения точности, преобразуют импульсный сигнал в аналоговый и интегрируют этот аналоговый сигнет в течение времени, определяемого длительностью каждого импульса скорости. 2,Способ по п. 1, отличающий с я тем, что, с целью повышения надежности контроля, при достижении аналоговым сигналом заданного порогового уровня, определяемого нижним пределом контролируемой скорости, прекращают формирование предупредительного сигнала. 3. Устройство для контрсшя работы преобразователя скорости, содержащее частотно-импульсный датчик скорости, соединенный с интегратором, выход которого подклю н к схеме сравнения, связан-, ной с исполнительным органом, о т л и 4 а ю щ е е с я 1гем,что, в него введен : дискретно-аналоговый преобразователь, ислюченный между выходом частотно-импульсного датчика скорости и вторым входом интегратора. 4. Устройство по п. 3, о т л и ч а о щ е е с я тем, что в него введен детектор нижнего предела скорости, установленный между выходом дискретно-аналогового преобразова:теля и входом интегратора. . Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР 274515, кл. q 01 Р 3/66, 1965. 2.Авторское свидетельство СССР 624165, кл. qOl Р 3/50, 1976. прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЧАСТОТУ | 1989 |
|
RU2024195C1 |
| Интегрирующее устройство | 1985 |
|
SU1300500A1 |
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2014 |
|
RU2571549C1 |
| Противоблокировочное устройство для управления тормозом колеса | 1978 |
|
SU1052150A3 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
| МОДУЛИРОВАННЫЙ ПОДМЕШИВАЕМЫЙ ПСЕВДОСЛУЧАЙНЫЙ СИГНАЛ | 1994 |
|
RU2107389C1 |
| ВРЕМЯ-ИМПУЛЬСНЫЙ УНИВЕРСАЛЬНЫЙ ИНТЕГРИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ | 2018 |
|
RU2689805C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |