Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано в качестве датчика электропривода (или способа его реализации) в системах регулирования асинхронных электроприводов с преобразователями частоты на основе автономных инверторов с широтно-импульсным регулированием напряжения.
Известен способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора тока, заключающийся в том, что измеряют ток на входе преобразователя частоты, измеряют напряжение на входе инвертора и измеряют на входе системы управления инвертором преобразователя частоты сигнал, пропорциональный выходной частоте инвертора, а электромагнитный момент двигателя вычисляют как результат частного от деления произведения измеренных сигналов тока и напряжения на упомянутый сигнал, пропорциональный выходной частоте инвертора [1]
Недостатком известного способа измерения электромагнитного момента являются, во-первых, сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (тока и напряжения). Также недостатком известного способа является большая величина пульсаций выходного сигнала измеренного момента (вызванная коммутационными провалами напряжения на входе автономного инвертора тока), требующая, как правило, из условия сглаживания установки на выход устройства дополнительного фильтрующего звена, вносящего при этом запаздывание в измерение сигнала момента, неустойчивое измерение момента в области выходных низких (пусковых) частот электропривода, обусловленное необходимостью проведения множительно-делительным блоком операций умножения и деления малых сигналов (усугубляющееся влиянием указанных коммутационных провалов напряжения, присутствующих в одном из входных сигналов блока).
Известен также способ измерения электромагнитного момента асинхронного двигателя, питаемого от преобразователя частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, заключающийся в том, что измеряют на выходе инвертора статорные токи двух фаз двигателя, вычисляют статорный ток третьей фазы двигателя путем суммирования измеренных сигналов двух фазных токов двигателя, системой управления инвертором преобразователя частоты формируют для трех выходных фаз преобразователя частоты сигналы задания знака полуволны основной гармоники выходного фазного напряжения: +1 для положительной полуволны, -1 для отрицательной полуволны, вычисляют произведения измеренных и вычисленных значений фазных токов двигателя на соответствующей данной фазе сигнал задания знака полуволны основной гармоники фазного напряжения инвертора, при этом электромагнитный момент двигателя находят в виде суммы полученных произведений сигналов [2]
Недостатками известного способа измерения электромагнитного момента являются сложность, обусловленная наличием двух операций измерения высокопотенциальных электрических сигналов (а именно, двух фазных токов), ограниченная область применения, а именно, электроприводами, в которых обеспечивается управление асинхронным частотно-регулируемым двигателем с постоянным магнитным потоком двигателя, так как измеряемый известным способом сигнал (активной составляющей статорного тока двигателя) пропорционален электромагнитному моменту асинхронного двигателя только при неизменном значении магнитного потока; в случае управления двигателем с изменяющимся магнитным потоком при известном способе вносится существенная ошибка в величину измеряемого электромагнитного момента (до 20-50%). Также недостатком известного способа является увеличение пульсаций измеренного момента на низкой выходной частоте электропривода, требующее дополнительной фильтрации для устойчивой работы в системе регулирования электропривода; это вносит значительное запаздывание (0,2-0,3 с), снижая быстродействие.
Известен способ измерения электромагнитного момента асинхронного двигателя, подключенного к сети через преобразователь частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, при котором измеряют ток, фазные напряжения с последующим вычислением электромагнитного момента через определенный интеграл от электромагнитной мощности, определяемой как произведение вычисленной путем суммирования фазных напряжений ЭДС на величину измеренного тока. Интегрирование производят в течение каждого полупериода основной гармоники фазного напряжения, при этом в начале каждого последующего периода времени результат интегрирования обнуляют [3]
Недостатками данного способа являются сложность, обусловленная наличием большого числа операций: измерение высокопотенциальных токов и напряжений, вычисление произведений этих параметров; невысокое быстродействие из-за запаздывания, равного полупериоду выходного напряжения (время запаздывания может достигать 0,5-1 с при низких значениях частот и питании двигателя от преобразователя частоты).
Целью изобретения является упрощение и повышение быстродействия измерения электромагнитного момента.
Это достигается тем, что при способе измерения электромагнитного момента асинхронного двигателя, подключенного к сети через преобразователь частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, при котором измеряют ток с последующим вычислением электромагнитного момента через определенный интеграл, измерение тока осуществляют в звене постоянного тока, а вычисление электромагнитного момента производят по формуле
M= U I·dt=uIT/K где I измеренный ток в звене постоянного тока преобразователя частоты;
I·dt=uIT/K где I измеренный ток в звене постоянного тока преобразователя частоты;
Т период основной гармоники выходного напряжения преобразователя частоты;
τ интервал интегрирования;
К коэффициент, определяемый соотношением между указанным периодом и пределами интегрирования, K ≥ 6;
U масштабный коэффициент, соответствующий среднесуточному или номинальному напряжению сети.
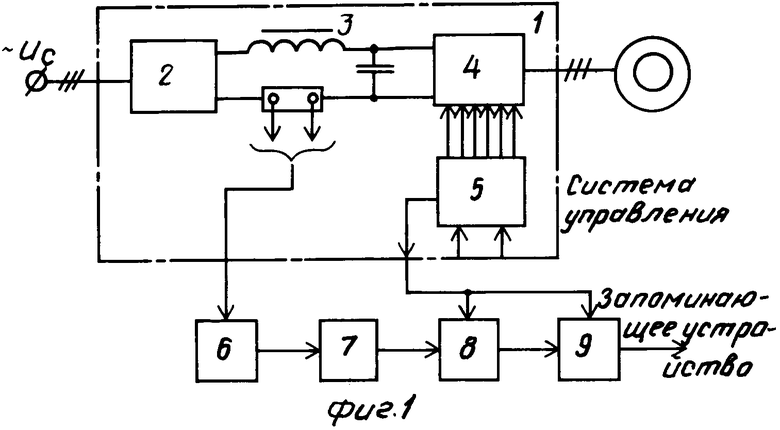
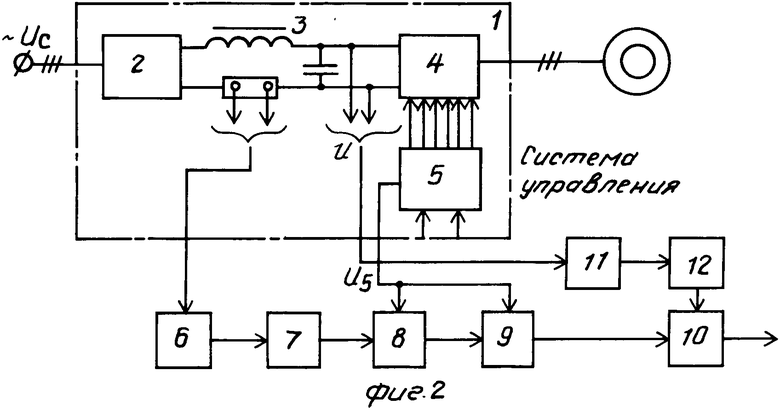
На фиг.1 представлена структурная схема устройства, в котором реализуется способ измерения электромагнитного момента асинхронного двигателя; на фиг. 2 то же, вариант исполнения; на фиг.3 временные диаграммы функционирования элементов структурных схем, представленных на фиг.1 и 2; на фиг.4 функциональная схема устройства для измерения электромагнитного момента асинхронного двигателя; на фиг.5 временные диаграммы работы элементов устройства.
Структурная схема устройства, реализующего способ измерения электромагнитного момента асинхронного двигателя, содержит преобразователь частоты 1, состоящий из последовательно включенных выпрямителя 2, силового фильтра 3 и автономного инвертора 4 с широтно-импульсным регулированием выходного напряжения, соединенного своими входами с основными выходами системы 5 управления инвертором 4, а выходами с асинхронным двигателем. Также блок-схема содержит последовательно соединенные датчик тока 6, аналого-цифровой преобразователь 7, блок интегрирования 8 и запоминающее устройство 9, при этом установочный вход блока интегрирования 8 и разрешающий вход запоминающего устройства 9 соединены с одним из выходов системы управления инвертором 5, задающим последовательность импульсов частотой, связанной постоянным соотношением с частотой основной гармоники выходного напряжения инвертора, вход датчика тока 6 подключен к выходу выпрямителя 2 преобразователя частоты 1, а выход запоминающего устройства 9 является выходом структурной схемы, иллюстрирующей предложенный способ управления.
Согласно другому варианту структурная схема устройства для реализации способа с повышенной точностью измерения момента дополнительно содержит множительный блок 10, датчик напряжения 11 и аналого-цифровой преобразователь 12, при этом первый вход множительного блока 10 соединен с выходом запоминающего устройства 9, второй вход связан через последовательно соединенные аналого-цифровой преобразователь 12 и датчик напряжения 11 с входом инвертора 4, а выход множительного блока 10 является выходом структурной схемы, представленной на фиг.2.
На приведенных временных диаграммах (см.фиг.3) используются следующие обозначения: U6 и U8 выходные сигналы соответственно датчика тока 6 и блока интегрирования 8; U5 и U9 сигналы соответственно на частотно-задающем выходе системы управления инвертором 5 и на выходе запоминающего устройства 9; fт сигнал внутренней тактовой частоты цифровой системы (с периодом дискретности квантования Δt).
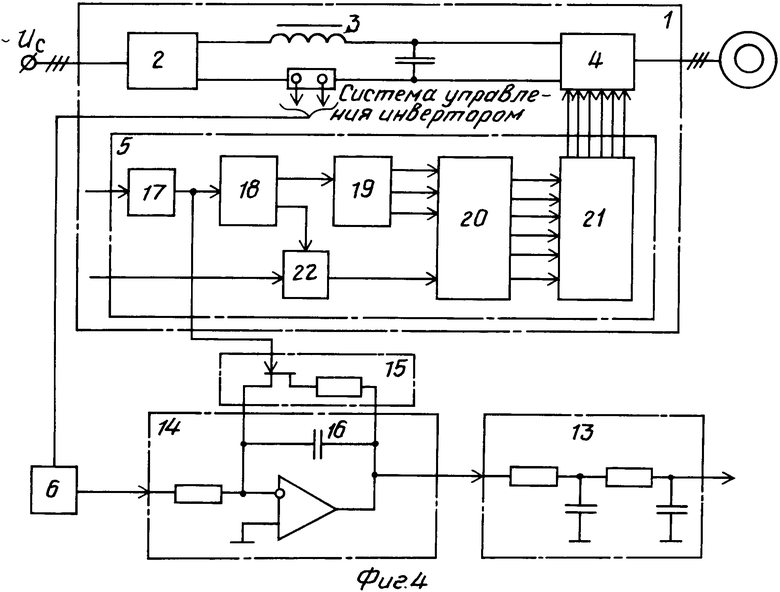
На фиг.4 приведена функциональная схема устройства для измерения электромагнитного момента асинхронного двигателя, питающегося от преобразователя частоты 1, содержащая датчик тока 6, фильтр 13, интегратор 14 и ключ 15, соединенный управляющим входом с дополнительным выходом системы управления инвертором 5, на котором задается последовательность импульсов частотой, связанной постоянным соотношением с частотой основной гармоники выходного напряжения инвертора 4.
Ключ 15 подсоединен своими двумя выходными выводами параллельно емкостному элементу 16 интегратора 14, соединенного своим выходом с входом фильтра 13 и связанного своим входом через датчик тока 6 с выходом выпрямителя 2 преобразователя частоты 1, а выход фильтра 13 является выходом устройства. В качестве одного из возможных вариантов выполнения, система управления инвертором 5 на фиг.4 показана выполненной в виде последовательно соединенных задающего генератора 17, блока задания алгоритма модуляции 18, кольцевого счетчика 19, логического блока 20 и блока формирования импульсов 21. Второй выход блока задания алгоритма модуляции 18 подключен к первому входу модулятора 22, подсоединенного своим выходом к второму входу логического блока 20. При этом вход задающего генератора 17 и второй вход модулятора 22 являются соответственно задающими входами системы 5 по частоте и напряжению, а выход блока формирования импульсов 21 и выход задающего генератора 17 являются соответственно основным выходом системы управления инвертором 5 и дополнительным выходом системы 5, задающим последовательность импульсов частотой, связанной постоянным соотношением с частотой основной гармоники выходного напряжения инвертора 4.
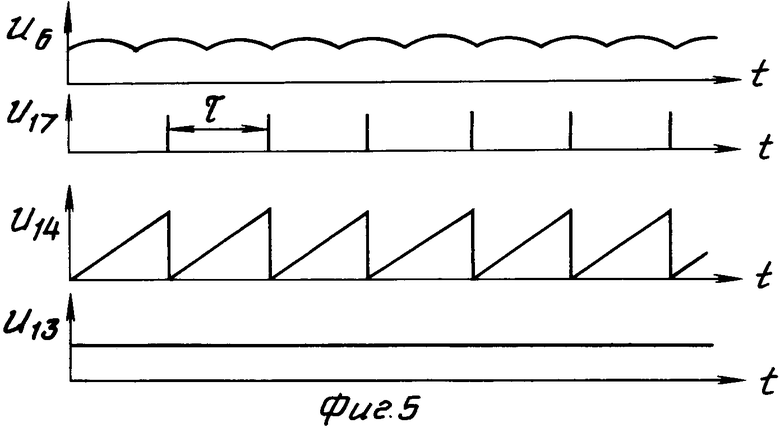
На временных диаграммах работы элементов устройства (см.фиг.5) используются следующие обозначения: U6 выходной сигнал датчика тока 6; U17 выходной сигнал задающего генератора 17; U13 и U14 выходные сигналы соответственно фильтра 13 и интегратора 14.
Способ измерения электромагнитного момента заключается в следующем: датчиком тока 6 измеряют ток на выходе выпрямителя 2 преобразователя частоты 1, системой управления инвертором 5 задают импульсным сигналом U5 последовательность временных интервалов τ, по своей длительности связанных постоянным соотношением К с периодом Т основной гармоники выходного напряжения инвертора: τ=Т/K. В течение каждого данного интервала времени τ интегрируют цифровым блоком интегрирования 8 поступающий на его информационный вход (через аналого-цифровой преобразователь 7) сигнал, измеренный датчиком тока 6. При этом в начале каждого последующего интервала времени результат интегрирования U8 на выходе блока интегрирования 8 обнуляется (при воздействии на его установочный вход фронта изменения импульса из лог. "1" в лог. "0" сигнала U5, поступающего с дополнительного выхода системы 5). В блоке интегрирования 8 операция интегрирования реализуется программным образом на основе программы суммирования в следующем виде:
u8(i) u7(i)·Δt(i+1)
u7(i)·Δt(i+1)
u8(i)=0, при 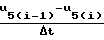 > 0 (1)
> 0 (1)
u
 u7(i)·Δt(i+1) где Δt интервал дискретности квантования цифровой системы;
u7(i)·Δt(i+1) где Δt интервал дискретности квантования цифровой системы;
U7 выходной сигнал аналого-цифрового преобразователя 7;
U'8(i) значение выходного сигнала U8 блока интегрирования в конце интервала τ;
i порядковый номер следования интервала квантования Δt от начала заданного интервала τ;
[τ/Δt] операция выделения целого числа.
Конечный результат интегрирования U8 (полученный в блоке 8 за весь интервал времени τ) по окончании указанного интервала при воздействии уровня лог. "1" сигнала U5 на разрешающий вход запоминающего устройства 9 передается в данный момент времени в запоминающее устройство 9. При этом вычисленное значение U'8 записывается в запоминающее устройство 9 (т.е. U9U'8) и хранится на его выходе до прихода (через очередной интервал τ) следующего импульсного сигнала U5, равного лог. "1", в момент появления которого информация в запоминающем устройстве 9 обновляется. Таким образом, выходной сигнал U9 cтруктурной схемы на фиг.1 (пропорциональный электромагнитному моменту двигателя) вычисляют как результат интегрирования цифрового сигнала U7 (соответствующего аналоговому измеренному сигналу U6 датчиком тока 6) в конце временного интервала τ.
Покажем, что измеренный предложенным способом сигнал пропорционален электромагнитному моменту асинхронного двигателя. В преобразователе частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения активная мощность Р, потребляемая инвертором и двигателем, описывается формулой
Р U I Рэм + ΔР, (2) где U напряжение на входе инвертора;
I ток на выходе выпрямителя;
Рэм электромагнитная мощность двигателя;
ΔР электрические потери в инверторе и двигателе.
С учетом пренебрежения величиной электрических потерь в инверторе и двигателе (составляющих в современных приводах не более 5-7% от их номинальной мощности) получим
Рэм ≈ UI (3)
Электромагнитный момент двигателя вычисляется из выражения
μ Рэм/f UIТ, (4) где f и Т соответственно частота и период основной гармоники выходного напряжения инвертора.
Измеренный предложенный способом сигнал электромагнитного момента описывается через аналоговые величины сигналов формулой
u9 I·dt (5) а с учетом условия постоянства значения тока (в течение каждого временного интервала):
I·dt (5) а с учетом условия постоянства значения тока (в течение каждого временного интервала):
U9 ≈ IТ/K (6)
Последнее условие на практике абсолютно справедливо в установившихся режимах работы электропривода, а также может достаточно точно быть допущено в динамических режимах работы электропривода при условии незначительного изменения сигнала тока за время интервала τ, т.е. для малых значений интервалов τ (составляющих, например, не более 20-30 мс). Требуемое уменьшение величины временного интервала τ достигается соответствующим выбором коэффициента К системы управления инвертором 5.
Так как при питании преобразователя частоты 1 от стабильной питающей сети входное напряжение U инвертора 4 с широтно-импульсным регулированием выходного напряжения остается в процессе работы практически неизменным (меняется менее 5% от своего номинального значения Uн в функции нагрузки двигателя)
U сonst Uн, (7) то с учетом этого выражения (4) и (6) пропорциональны между собой. Это означает, что предложенным способом вычисляется сигнал (в цифровом виде U'8 из выражения (1) или в аналоговом виде из выражения (6), пропорциональный фактическому электромагнитному моменту двигателя, описываемому выражением (4).
При реализации способа по структурной схеме, представленной на фиг.2, дополнительно датчиком напряжения 11 измеряют сигнал U напряжения на входе инвертора 4, который преобразуют из аналогового в цифровой вид преобразователем 12. Уточненное значение U10 электромагнитного момента двигателя вычисляют на выходе множительного блока 10 из выражения
U10 U9 U UIT/K (8) (т.е. в виде произведения, полученного в результате интегрирования сигнала U9 на значение U измеренного напряжения). Очевидно, как следует из выражений (4) и (8), последний способ обеспечивает более точное измерение электромагнитного момента двигателя, так как учитывает влияние изменения входного напряжения U инвертора (от изменения нестабильной питающей сети, от изменения нагрузки двигателя) на значение вычисляемого электромагнитного момента двигателя.
Точность предложенного способа может быть еще более повышена, если в блоке 10 программно реализуется вычисление
U10 (U IR) IТ/K, (9) где R эквивалентное сопротивление активных потерь в инверторе и двигателе.
Очевидно, в этом случае электромагнитный момент вычисляется с учетом потерь энергии в инверторе и двигателе, что повышает точность измерения момента в области низких значений частот.
Устройство для измерения электромагнитного момента асинхронного двигателя (см.фиг.4) работает следующим образом: в преобразователе частоты 1 питающее переменное трехфазное напряжение сети выпрямляется с помощью неуправляемого выпрямителя 2, сглаживается силовым фильтром 3 и инвертируется в переменное трехфазное напряжение регулируемой частоты инвертором 4, питающим асинхронный двигатель. Выходные частота и амплитуда основной гармоники выходного напряжения инвертора 4 задаются пропорциональными входным сигналам системы управления 5, соответственно поступающим на вход задающего генератора 17 и второй вход модулятора 22. На выходе задающего генератора 17 формируется импульсный сигнал U17 частотой kf (где f частота основной гармоники выходного напряжения; K ≥ 6 постоянное целое число), поступающий на вход блока задания алгоритма модуляции 18, формирующего на своем первом выходе импульсный сигнал частотой 6f, на втором выходе пилообразное опорное напряжение частотой kf/m (где m целое число).
С выхода кольцевого счетчика 19 на входы логического блока 20 поступает трехфазная система импульсных сигналов, задающих фазовый сдвиг и длительности положительной и отрицательной полуволны основных гармоник выходных фазных напряжений инвертора. На другой вход логического блока 20 с выхода модулятора 22 поступает импульсный сигнал, задающий скважность включенного состояния и выключенного состояния силовых ключей инвертора. На выходе логического блока 20 формируются с необходимыми временными сдвигами и длительностями импульсы управления силовыми ключами инвертора, которые с помощью блока формирования импульсов 21 усиливаются, гальванически разделяются от цепей управления и подаются к управляющим переходам силовых ключей (транзисторов, тиристоров) инвертора 4.
Измеренный сигнал U6 тока на выходе выпрямителя 2 с выхода датчика тока 6 поступает на вход интегратора 14 (выполненного, например, на операционном усилителе, в отрицательной обратной связи которого включен емкостной элемент 16 конденсатор). В течение основной части интервала τ, характеризуемой нулевым значением сигнала U17, поступающего с выхода задающего генератора 17 на управляющий вход ключа 15, указанный ключ 15 закрыт. При этом выходной сигнал U14 интегратора 14 изменяется в функции интеграла от входного сигнала U6 (пропорционального току I выпрямителя 2) и в конце интервала τ достигает значения, описываемого формулой (5). По окончании интервала τ в сигнале U17 на выходе задающего генератора формируется узкий сигнал лог. "1", при поступлении которого на вход ключа 15 указанный ключ открывается, разряжая до нуля емкостной элемент 16 интегратора 14, выходное напряжение интегратора 14 обнуляется. После изменения уровня лог. "1" на лог. "0" в сигнале U17 ключ 15 закрывается и дальнейшая работа устройства повторяется.
Выходной сигнал пилообразной формы U14 интегратора 14 поступает на вход фильтра низкой частоты 13, посредством которого выделяется постоянная составляющая сигнала U13, пропорциональная электромагнитному моменту двигателя. За счет высокой частоты kf пилообразного напряжения U14, достигнутой выбором большого значения коэффициента К задающего генератора 17, хорошее сглаживание выходного сигнала U13 в предложенном устройстве обеспечяивается малой постоянной времени фильтра 13, а следовательно, при высоком быстродействии измерения электромагнитного момента двигателя.
Изобретение позволяет расширить область применения способа измерения электромагнитного момента асинхронного двигателя. Упрощение способа достигается за счет сокращения общего числа сложных операций, а именно: измерения высокопотенциальных электрических сигналов (тока) до одной (вместо двух по способу-прототипу) и исключения нелинейных операций умножения (вместо трех в прототипе). Расширение области применения способа, в частности на частотно-управляемые электроприводы с изменяющимся магнитным потоком асинхронного двигателя, достигается за счет того, что при предложенном способе измеренное значение электромагнитного момента двигателя пропорционально и однозначно определяет фактический электромагнитный момент двигателя при любом значении магнитного потока двигателя (в прототипе только при постоянном магнитном потоке двигателя). Благодаря указанной расширенной области применения предложенный способ измерения электромагнитного момента позволяет использование в высококачественных частотно-управляемых асинхронных электроприводах с экономичным законом управления и повышенным диапазоном регулирования скорости (характеризуемых изменяемым магнитным потоком двигателя).
При способе для условий питания преобразователя частоты от нестабильной питающей сети достигается повышение (на 5-15%) точности измерения момента, обеспечиваемое за счет уточнения измеряемого значения электромагнитного момента двигателя в зависимости от контролируемого текущего значения входного напряжения инвертора. Повышение быстродействия измерения электромагнитного момента двигателя достигается уменьшением времени интервала измерения момента (за счет увеличения краткости частоты импульсов задающего генератора системы управления инвертором) и уменьшением постоянной времени фильтра, сглаживающего измеренный сигнал (за счет в этом случае высокочастотного спектра пульсаций в измеренном предложенным устройством сигнале момента). В частности, при выборе коэффициента К (соотношения между выходной частотой задающего генератора и частотой основной гармоники выходного напряжения инвертора) равным 72, на выходной низкой частоте 3 Гц преобразователя частота пульсаций измеренного сигнала момента составляет 216 Гц (с временным интервалом τ= 1/216 5 мс). При этом с учетом эффективного сглаживания фильтром выходного сигнала момента общее время запаздывания при измерении электромагнитного момента предложенным устройством составляет не более 30 мс (по прототипу до 0,2-0,3 с).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
Использование: в системах регулирования асинхронных электропроводов с преобразователями частоты на основе автономных инверторов с широтно импульсным регулированием напряжения. Сущность: при способе измерения электромагнитнолго момента асинхронного двигателя, питаемого от сети через преобразователь частоты на основе автономного инвертора с широтно импульсным регулированием выходного напряжения с помощью датчика тока измеряют ток в звене постоянного тока преобразователя частоты и вычисляют электромагнитный момент по формуле, приведенной в тексте описания. 5 ил.
СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ, подключенного к сети через преобразователь частоты на основе автономного инвертора с широтно-импульсным регулированием выходного напряжения, при котором измеряют ток с последующим вычислением электромагнитного момента через определенный интеграл, отличающийся тем, что измеряют ток в звене постоянного тока преобразователя частоты, а электромагнитный момент вычисляют по формуле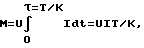
где I ток в звене постоянного тока преобразователя частоты;
T период основной гармоники выходного напряжения преобразователя частоты;
τ интервал интегрирования;
K коэффициент, определяемый соотношением указанного периода и пределов интегрирования, K ≥ 6;
U масштабный коэффициент, соответствующий среднесуточному или номинальному напряжению сети.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для определения момента асинхронного двигателя в регулируемом электроприводе | 1987 |
|
SU1520362A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
