с
6
ю
i
(Л
СП
о
СП
cpuai
о/
см
Изобретение относится к электронным системам управления торможением транспортных средств.
Цель изобретения - повышение эффективности торможения.
На фиг.1 изображена блок-схема системы торможения; на фиг.2 - более подробная блок-схема системы торможения; на фиг.З - схема устройства вычисления адаптивной константы; на фиг.4 - схема части системы для получения сигнала команды управления, скорректированного с учетом продольного наклона дороги.
Система (фиг.1) содержит цепь управления давлением, на вход которой подается сигнал с задатчика 1, устан- новленного на педали торможения, этот сигнал в сумматоре 2 сравнивается с выходным сигналом Р датчика 3 давления и образуется сигнал Е -рассогласования в величине давления, который подается на вход компаратора 4, выходные сигналы которого вызьшают изменение давления в электропневматическом модуляторе 5 давления таким образом, что величина сигнала Е уменьшается. Воздух или жидкость, необходимые для подачи давления, хранятся в резервуаре 6.
Модулятор 5 имеет пару электромагнитных клапанов 7 и 8, работающих так, чтобы увеличить или уменьшить давление в управляющей камере релейного клапана 9, который реагирует на давление в управляющей камере и приходит в рабочее состояние, когда усилие торможения в приводах 10 и 11 тормозов 12 становится равным контрольному давлению.
Система содержит цепи управления с обратной связью, которые являются раздельными для каждой оси или каждого колеса и на которые подаются сигналы D команды управления давлением с блока 13 коррекции, благодаря которому при одинаковых входных командах на входе блока 13 коррекции на его выходе могут формироваться различные сигналы команды управления давлением для передней (Dp) и задней (Dg) тормозных систем.
В качестве корректирующих поправок используются подаваемые на вход блока 13 параметры нагрузок Lp , Ь на оси, получаемые от датчиков 14 и 15 нагрузки (передней и задней осей) .транспортного средства 16, и для
5
0
5
0
5
0
5
0
5
каждой оси формируется константа давления.
/Другой важный фактор воздействия на торможение, обусловленный наклоном дороги, может быть определен путем сравнения скорости торможения, измеренной датчиком 17 замедления транспортного средства, и сигналов с датчиков 18 скорости на колесах транспортного средства, дифференцированных электронной схемой устройства 19 определения продольного уклона дороги. В результате получают эталонный сигнал подобно тому, как получают такой сигнал в антиблокирово чных системах. Полученная пооправка О на уклон дороги является рассогласованием замедления со знаком, который показывает движение в гору или под гору, и эта величина может быть непосредственно прибавлена к сигналу команды торможения для обеспечения требуемой коррекции.
На фиг.2 более подробно показана схема блока 13 коррекции, в который компенсирующие входные сигналы поступают с датчиков 17 нагрузки на оЬи,а сигналы об уклоне дороги - с устройства 19. На фиг. 2 показан полностью только канал управления для задней оси,канал управления торможением для передней оси полностью аналогичен.
Сигналы D команд управления каналами передней и задней осей с задатчика 1 в сумматорах 20 и 21 соответственно складываются с сигналами поправки G , поступающими с блока 22 вычисления коррекций, и подаются на первые входы цифровых умножителей 23 и 24 соответственно. Сигналы команд управления с датчика 1 после фильтра- Тчии в фильтре 25 с сигналом F обратной связи, поступаклцими с датчика 17 транспортного средства, и образуется сигнал Fg рассогласования скорости торможения, который поступает на интегрирующее устройство 27 вычисления адаптивной константы С длительного действия для тормозной системы транспортного средства. Сигнал F рассогласования скорости торможения попадает на устройство 27 через управляемый переключатель 28 только тогда, когда действует сигнал управления S с вентиля 29, возникающий,в свою очередь, при появлении сигналов от датчика 30, показывающего, что уровен| команды превышает первый исходный
уровень, от датчика 31
1526570 показывающе
го, что ускорение находится в области нуля, от датчика 32, показывающего, что скорость превышает первое исходное пороговое значение, от датчика 33, показываюп1его, что уровень команды меньше второго исходного уровня и от датчика 34, показывающего, что скорость транспортного средства меньше второго исходного порогового значения. При отсутствии этих сигналов управляемый переключатель 29 запрещает попадание сигнала Fg на устройство 27, Переключатель 28 запрещает также прием сигнала F по команде с устройства 33 антиблокировки.
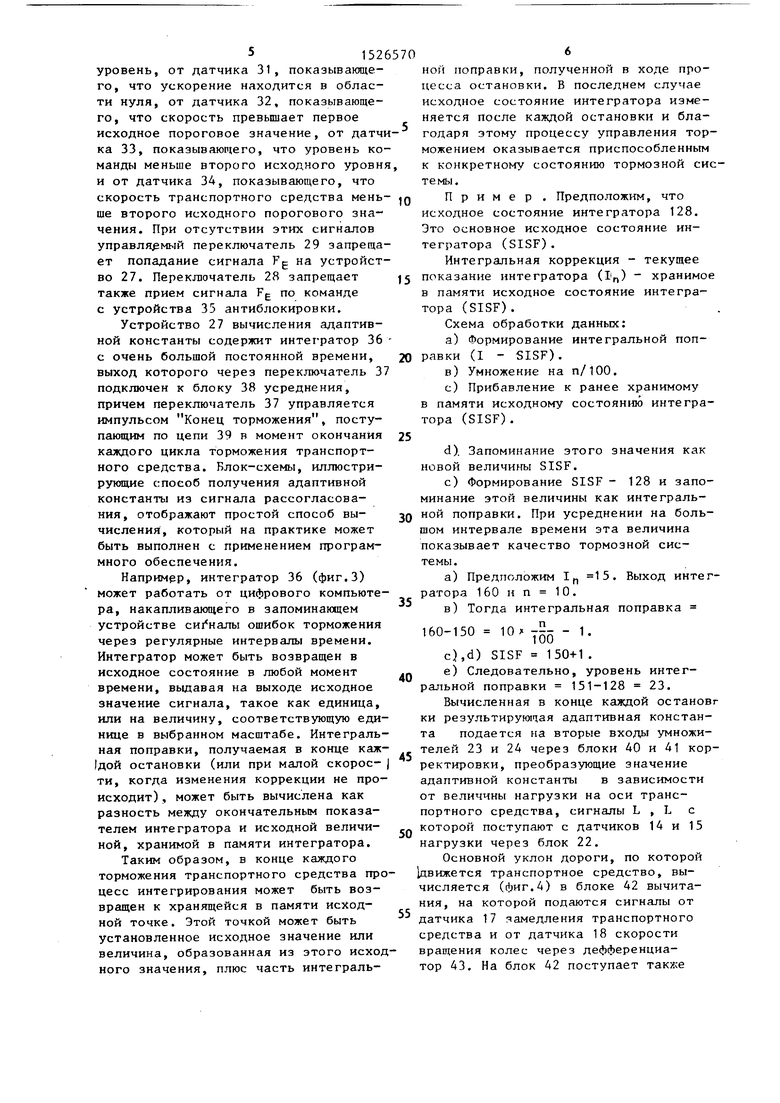
Устройство 27 вычисления адаптивной константы содержит интегратор 36 с очень большой постоянной времени, выход которого через переклю чатель 37 подключен к блоку 38 усреднения, причем переключатель 37 управляется импульсом Конец торможения, поступающим по цепи 39 в момент окончания каждого цикла торможения транспортного средства. Блок-схемы, иллюстрирующие способ получения адаптивной константы из сигнала рассогласова
НИН, отображают простой способ вычисления, который на практике может быть выполнен с применением программного обеспечения.
Например, интегратор 36 (фиг.З) может работать от цифрового компьютера, накапливающего в запоминающем устройстве ошибок торможения через регулярные интервалы времени. Интегратор может быть возвращен в исходное состояние в любой момент времени, выдавая на выходе исходное значение сигнала, такое как единица, или на величину, соответствующую единице в выбранном масштабе. Интегральная поправки, получаемая в конце каж- |дой остановки (или при малой скороети, когда изменения коррекции не происходит) , может быть вычислена как разность между окончательным показателем интегратора и исходной величиной, хранимой в памяти интегратора.
Таким образом, в конце каждого торможения транспортного средства процесс интегрирования может быть возвращен к хранящейся в памяти исходной точке. Этой точкой может быть установленное исходное значение или величина, образованная из этого исходного значения, плюс часть интеграль
0
5
ной поправки, полученной в ходе процесса остановки. В последнем случае исходное состояние интегратора изменяется после каждой остановки и благодаря этому процессу управления торможением оказывается приспособленным к конкретному состоянию тормозной системы.
Пример . Предположим, что исходное состояние интегратора 128. Это основное исходное состояние интегратора (SISF).
Интегральная коррекция - текущее 5 показание интегратора (I r,) - хранимое в памяти исходное состояние интегратора (SISF).
Схема обработки данных:
а) Формирование интегральной поправки (I - SISF).
в) Умножение на п/100.
с) Прибавление к ранее хранимому в памяти исходному состоянию интегратора (SISF).
0
25
30
35
d). Запоминание этого значения как новой величины SISF.
с) Формирование SISF - 128 и запоминание этой величины как интегральной поправки. При усреднении на большом интервале времени эта величина показывает качество тормозной системы .
а) Предположим If, 15. Выход интегратора 160 и п 10.
в) Тогда интегральная поправка
160-150
Т5о1.
0
5
0
5
c),d) SISF 150+1 .
е) Следовательно, уровень интегральной поправки 151-128 23.
Вычисленная в конце каждой остановг ки результирую1Г1ая адаптивная константа подается на вторые входы умножителей 23 и 2А через блоки 40 и 41 корректировки, преобразующие значение адаптивной константы в зависимости от величины нагрузки на оси транспортного средства, сигналы L , L с которой поступают с датчиков 14 и 15 нагрузки через блок 22.
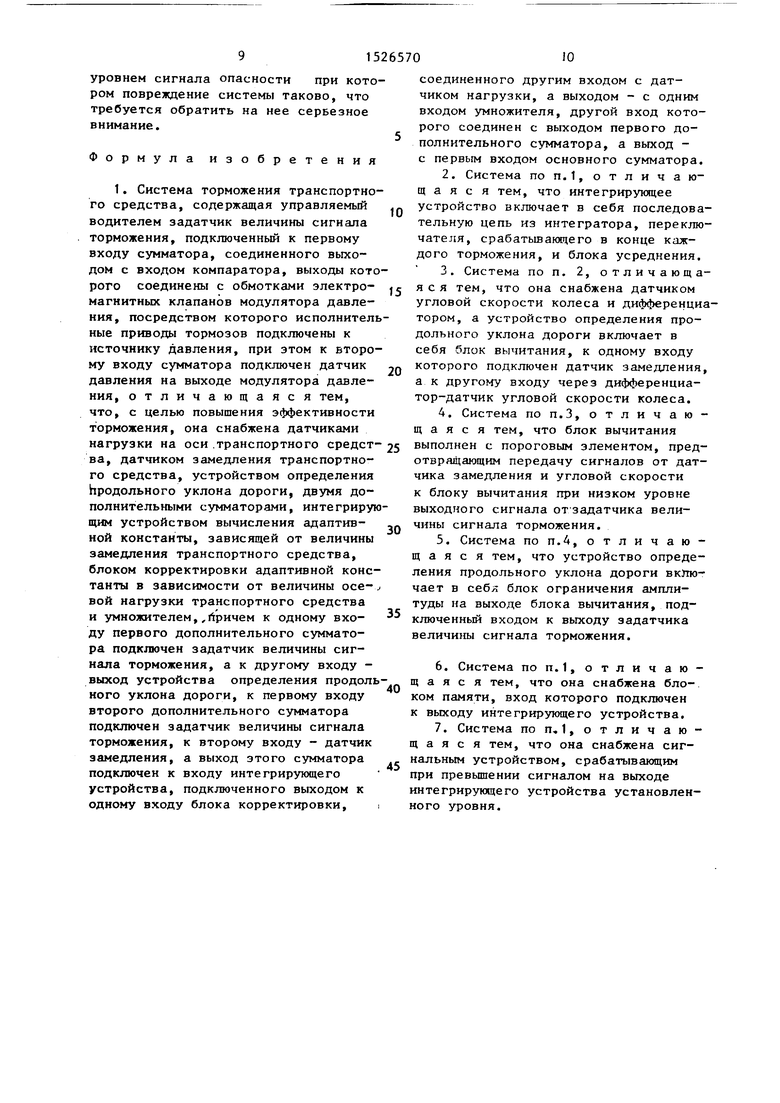
Основной уклон дороги, по которой 1движется транспортное средство, вычисляется (фиг.4) в блоке 42 вычитания, на которой подаются сигналы от датчика 17 замедления транспортного средства и от датчика 18 скорости враи1ения колес через дефференциа- тор 43. На блок 42 поступает такх;е
ограничивающт сигнап с низкоскоростного порогового элемента 44 всякий раз, когда сигнал коррекции стремится превысить сигнал команды водителя. Команда корректировки уклона снимается с сумматора 20(21) и подается в цепь 45. Величина уклона получается как разность между степенью изменения скорости вращения колес и выходным сигналом датчика замедления транспортного средства.
Из-за наличия подвешенной массы в датчике замедления данные результаты несколько замедляются под действи- |ем гравитации (поправка алгебраичес- ки прибавляется к любому замедлению/ ускорению, которое имеет место). Эта поправка лучше всего заметна в статическом состоянии при движении под гору, когда она представляет собой эквивалентное торможение транспортного стредства, необходимое для предотвращения ускорения из-за наклона за счет непрерьгоного возрастания скорости. Следовательно, разность между указанными двумя сигналами представляет собой ускорение и эта величина должна быть прибавлена к сигналу команды торможения, подаваемой водителем. На наклонах под гору эти сигналы прибавляются к сигналу водителя для обеспечения дополнительного торможения, а при накяонах в гору вычитываются из сигнала команды водителя для уменьшения торможения. Ни в како момент времени поправка на уклон не должна превьшать сигнал команды торможения, это обеспечивается с помощью блока 46 ограничения амплитуды, на который поступает эталонный сигнап о задатчика 1 и который уменьшает поправку до нуля при очень малы уровнях сигнала команды управления. Следовательно, на плоской поверхности обе измерительные системы дают одинаковые сигналы даже при условии торможения или ускорения.
Таким образом, сигнал D входной команды с педали торможения прибавляется в сумматорах 20 и 21 к двум сигналам G коррекции уклона, которые обычно равны друг другу, но раздельно подаются по двум (или более) каналам управления торможением, принятым в соответствии со стандартом раздельного торможения осей. Существуют обстоятельства, при которых не гарантируется одинаковая коррекция
0
5
0
5
0
5
0
5
jторможения по передней и задней осям в этом случае при вычислении корректирующих поправок должны учитываться нагрузки на оси. На выход каждого из умножителей 23 и 24 подается команда поправки на уклон, а в умножителе выполняется адаптивная регулировка и коррекция на нагрузку путем умножения входного сигнала на коэффициент коррекции давления (PMF), определяемый PMF равен адаптивной константе с транспортного средства, умноженной на коэффициент коррекции на .нагрузку на ось.
Конечный результат, вьфаженный в величинах, действующих на выходе датчика давления, используется для подачи сигналов ПрИ П команд изменения давления на вход сумматора 2. На остающийся вход сумматора 2 подается сигнал антиблокировки, вырабатьгоае- мый отдельным детектором 47 тормозной колодки.
Адаптивная константа длительного действия преобразуется с учетом рассогласования в .скорости торможения С (фиг.З) только тогда, когда:
1)транспортное средство находится на уровне земли;.
2)сигнап команды находится в середине диапазона команд;
3)скорость находится в середине среднего диапазона скоростей (например, 20-80 км/ч),
с той .целью, чтобы показать состояние всей тормозной системы транспортного средства.
На каждой остановке производится накопление полученных указанным образом величин и их обработка в интеграторе 36 с очень большой постоянной времени получается адаптивной константы за серию торможений транспортного средства. Эта адаптивная константа имеет номинальное или исходное значение, равное единице, и это значение постепенно изменяется между остановками для корректировки изменения состояния тормозной системы. Данная константа является хорошим индикатором качества тормозной системы и она постоянно изменяется в блоке управления и запоминается для оценки в момент старта или по команде качества работы тормозной системы с использованием выходного блока 48 памяти. Кроме этого, данная константа может соавниться с заранее определенным
уровнем сигнала опасности при котором повреждение системы таково, что требуется обратить на нее серьезное внимание.
Формула изобретения
1. Система торможения транспортного средства, содержащая управляемый водителем задатчик величины сигнала торможения, подключенный к первому входу сумматора, соединенного выходом с входом компаратора, выходы которого соединены с обмотками электромагнитных клапанов модулятора давления, посредством которого исполнительные приводы тормозов подключены к источнику давления, при этом к второму входу сумматора подключен датчик давления на выходе модулятора давления, отличающаяся тем, что, с целью повышения эффективности торможения, она снабжена датчиками нагрузки на оси .транспортного средства, датчиком замедления транспортного средства, устройством определения Ьродольного уклона дороги, двумя дополнительными сумматорами, интегрирующим устройством вычисления адаптивной константы, зависящей от величины замедления транспортного средства, блоком корректировки адаптивной константы в зависимости от величины осевой нагрузки транспортного средства и умножителем,,причем к одному входу первого дополнительного сумматора подключен задатчик величины сигнала торможения, а к другому входу - выход устройства определения продольного уклона дороги, к первому входу второго дополнительного сумматора подключен задатчик величины сигнала торможения, к второму входу - датчик замедления, а выход этого сумматора подключен к входу интегрирующего устройства, подключенного выходом к одному входу блока корректировки,
0
5
0
5
0
5
0
5
соединенного другим входом с датчиком нагрузки, а выходом - с одним входом умножителя, другой вход которого соединен с выходом первого дополнительного сумматора, а выход - с первым входом основного сумматора.
2.Система поп.1, отлича ю- щ а я с я тем, что интегрирующее устройство включает в себя последовательную цепь из интегратора, переключателя, срабатьшающего в конце каждого торможения, и блока усреднения,
3.Система по п. 2, отличающаяся тем, что она снабжена датчиком угловой скорости колеса и дифференциатором, а устройство определения продольного уклона дороги включает в себя блок вычитания, к одному входу которого подключен датчик замедления, а к другому входу через дифференциатор-датчик угловой скорости колеса.
4.Система поп.З, отличающаяся тем, что блок вычитания выполнен с пороговым элементом, пред- отвра115ающим передачу сигналов от датчика замедления и угловой скорости
к блоку вычитания при низком уровне выходного сигнала от задатчика величины сигнала торможения.
5.Система по п.А, отличающаяся тем, что устройство определения продольного уклона дороги включает в себя блок ограничения амплитуды на выходе блока вычитания, подключенный входом к выходу задатчика величины сигнала торможения.
6.Система по п.1, отличающаяся тем, что она снабжена бло-. ком памяти, вход которого подключен
к выходу интегрирующего устройства.
7.Система поп,1, отличающаяся тем, что она снабжена сигнальным устройством, срабатывающим при превышении сигналом на выходе интегрирующего устройства установленного уровня.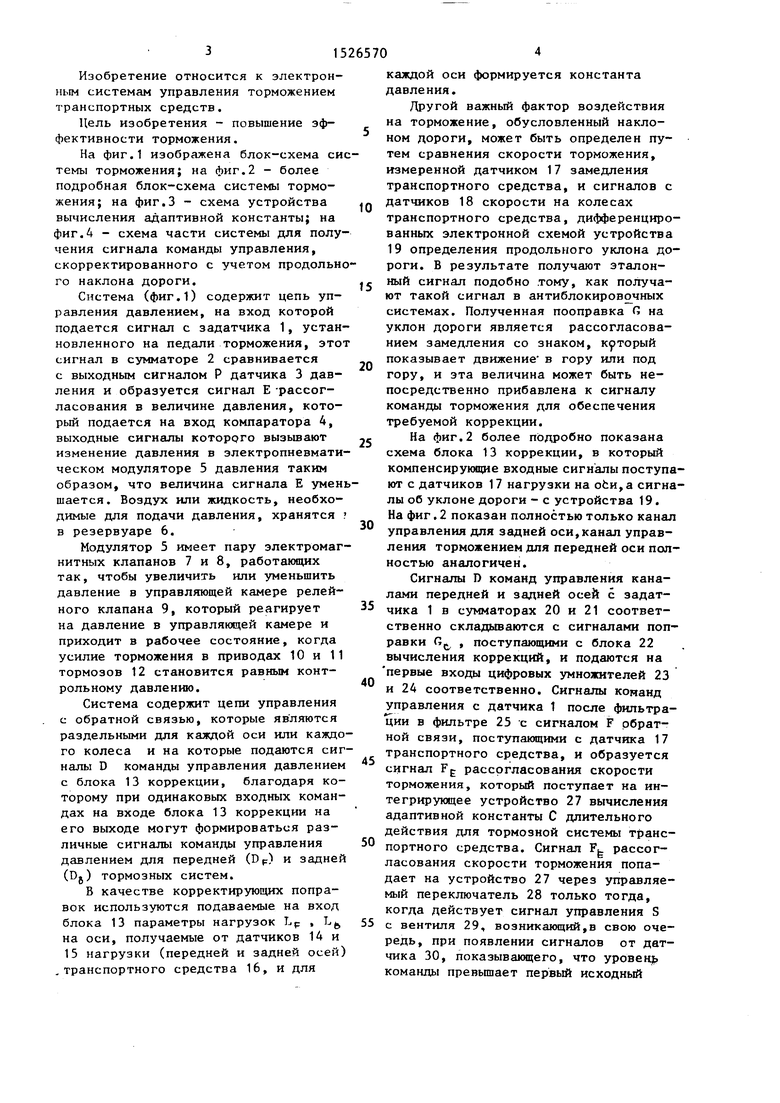

Изобретение относится к электронным системам управления торможением транспортных средств. Цель изобретения - повышение эффективности торможения. В систему, имеющую задатчик 1 величины сигнала торможения, подключенный через сумматор 2 к компаратору 4, управляющему электромагнитными клапанами 7 и 8 модулятора 5 давления, встроен блок коррекции 13. Последний осуществляет коррекцию выходного сигнала задатчика 1 в зависимости от осевой нагрузки транспортного средства и продольного уклона дороги. 6 з.п. ф-лы, 4 ил.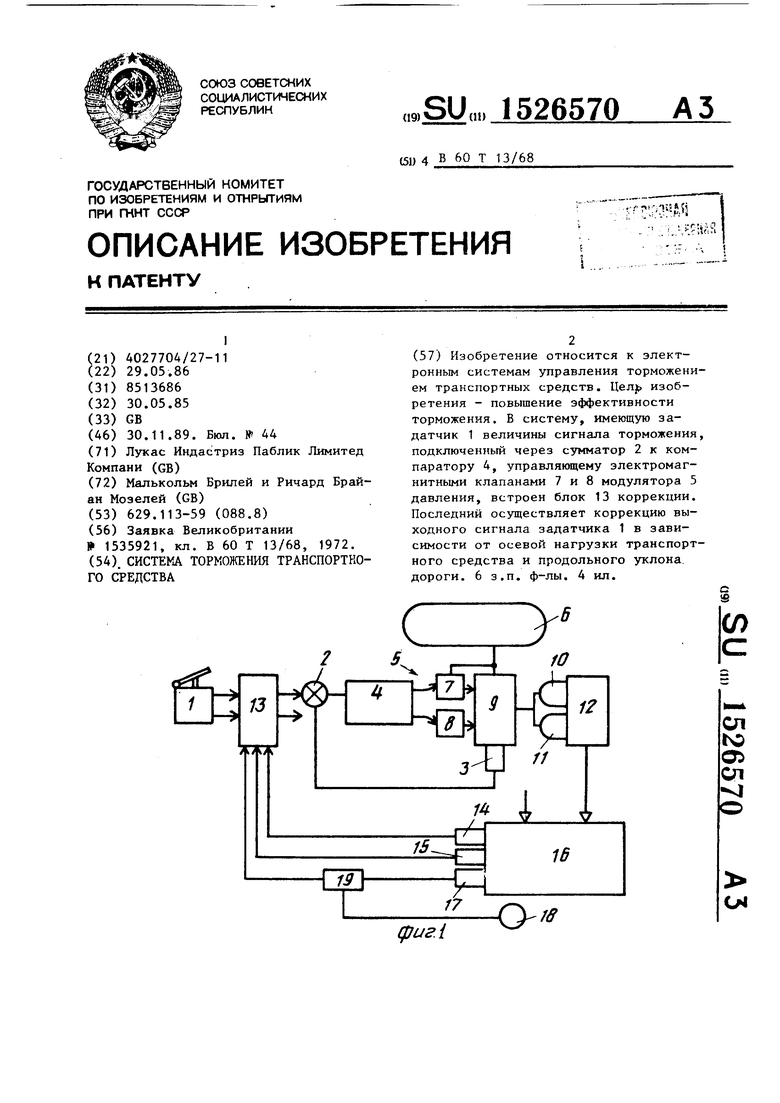
| Противофильтрационный экран | 1988 |
|
SU1535921A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
