Предметом изобретения является автоматическое транспортировочно-загрузочное устройство типа «механическая рука для передачи листов, например автомобильных рессор, из нагревательной конвейерной печи на гибочно-закалочный пресс, с возвратно-поступательно подвижной кареткой, несущая параллельно помещенные на горизонтальном валу стержни с вильчатыми захватами.
предлагаемое устройство по сравнению с аналогичным известным устройством обеспечивает более надежный зажим листа, например автомобильной рессоры.
Вильчатые захваты стерл ней каретки расположены на последней попарно и выполнены принудительно поворотными относительно их осей в противоположных направлениях.
На валу стержней с вильчатыми захватами укреплены цевочные диски, снабженные равномерно и попарно размещенными по окружности двумя ведущими пальцами и двумя радиальными прорезями, предназначенными для последовательного взаимодействия с горизонтальными пазами и ведущими пальцами на неподвижных направляющих каретки.
В каждой паре стержней на последних надеты попарно сцепляющиеся зубчатые секторы, кинематически связанные посредством подпружиненных противоположно направленных рычагов с двумя параллельными тягами, приводимыми в возвратно-поступательное движение от пневматического цилиндра.
На пути движения захватов с листом установлено несколько изогнутых направляющих планок, закрепленных на системе автоматически откидных щарнирных 3 рычагов.
№ 98580
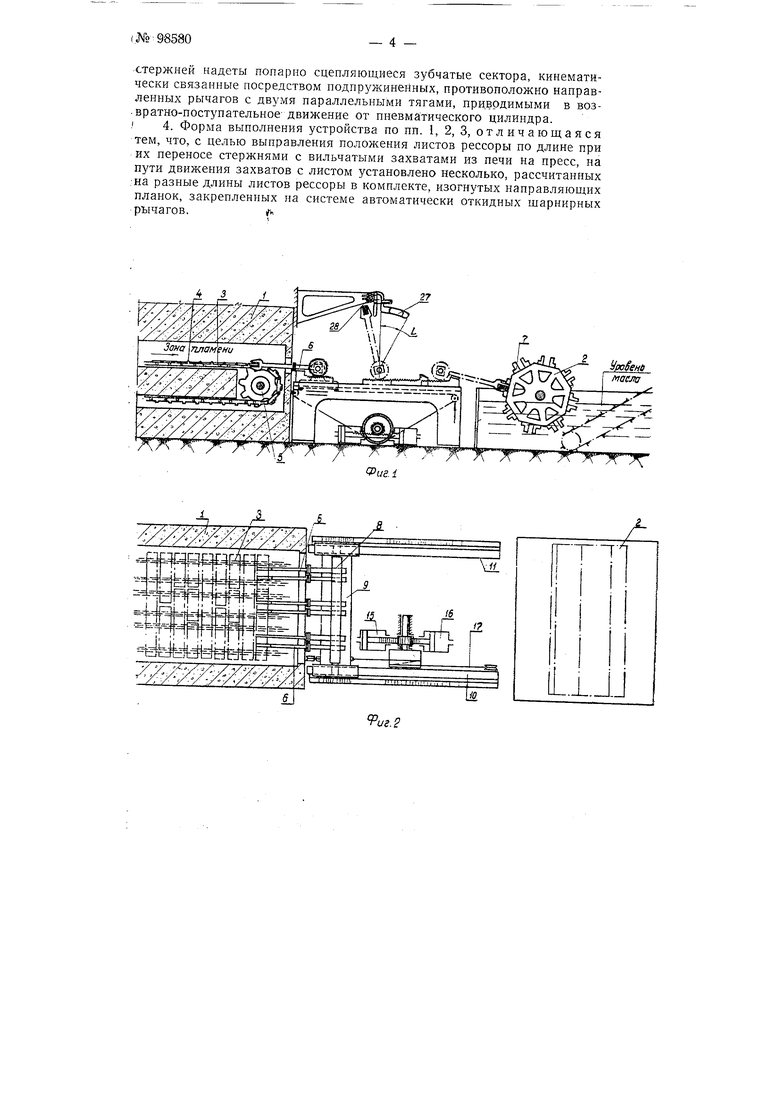
На фиг. 1 показано сбоку предлагаемое устройство, помещенное между нагревательной печью и гибочно-закалочным прессом; на фиг. 2- 10 же (вид сверху); на фиг. 3 и 4 предлагаемое устройство показано отдельпо в двух проекциях; на фиг. 5 - то же в разрезе по /-/ на фиг. 3; на фиг. 6 - в разрезе по //-// на фиг. 3; на фиг. 7 показана схема зажима листа; на фиг. 8 - механизм центрирования листа; на фиг. 9 - сечение по а-а на фиг. 8.
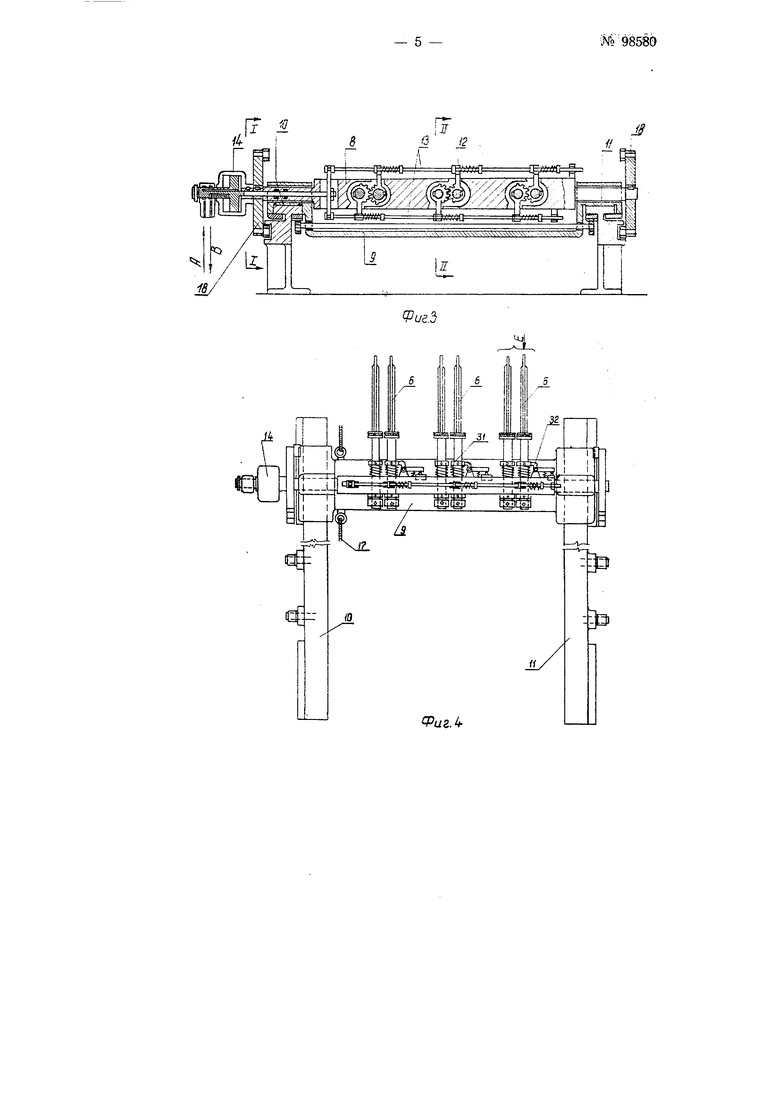
Предлагаемое устройство устанавливают между нагревательной пламенной печью 1 и ротационным гибочно-закалочным прессом 2. Заготовки 3 листов рессоры укладывают на снабженные выступами 4 звенья конвейера 5. Конвейер 5 перемещает листы 3 в разгрузочную часть печи 1, где листы 5 входят в вильчатые захваты стержней 6 для дальнейшего их переноса и загрузки в гибочные штампы 7, укрепленные на вращающемся барабане пресса 2.
Стержни 6 расположены параллельно и помещены своими нерабочими концами в валу 8, свободно вращающемся в подшипниках каретки 9. Последняя совершает возвратно-поступательное движение по направляющим 10 и //.
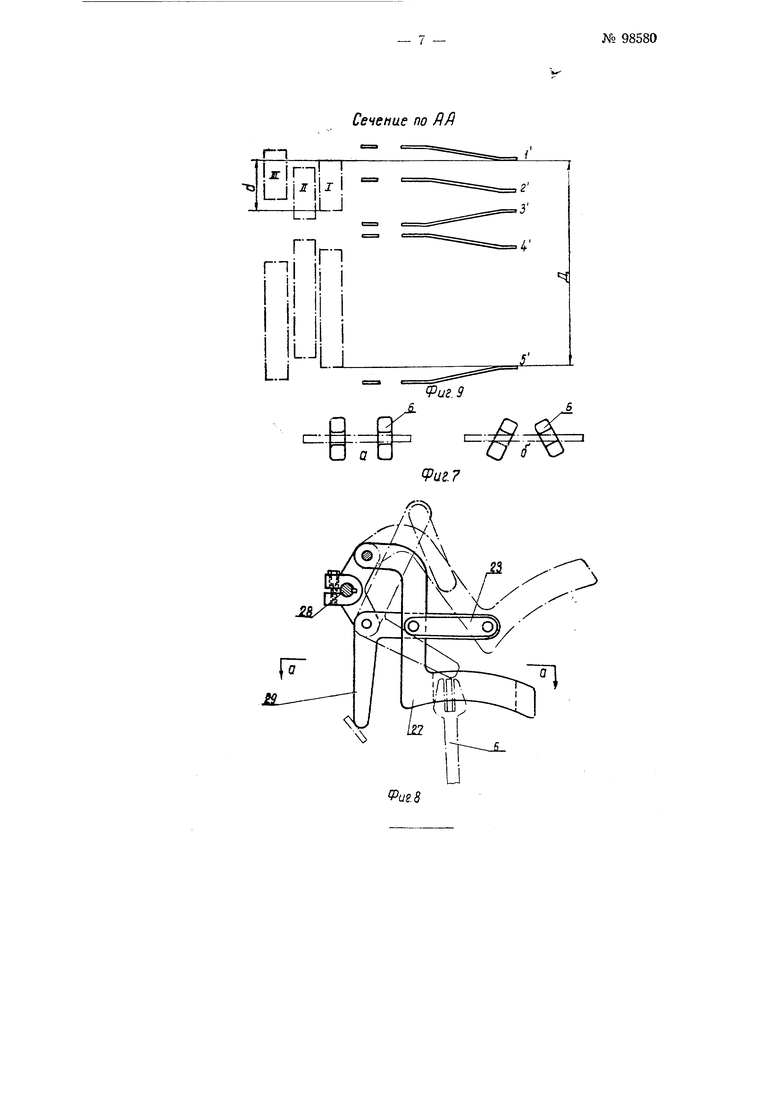
В моменты нахождения вильчатых захватов в зоне пламени печи и укладывания листа в щтампы 7 пресса 2, стержни 6 занимают положение, показанное на левой стороне фиг. 7 и обозначенное буквой «а. В период выноса листа 3 из зоны пламени печи и дальнейшего переноса его к штампам 7, вильчатые захваты стержней 6 занимают положение «зажатия, показанное на правой стороне фиг. 7 и обозначенное буквой :б. Для зажима листа 3 вильчатые захваты стержней 6, расположенных попарно на каретке 9, выполнены принудительно поворотными в противоположных направлениях относительно осей стержней 6 (как это видно из фиг. 7).
Поворот вильчатых захватов осуществляется посредством з бчатых секторов 12, находящихся под воздействием подпружиненных тяг 13, которые приводятся в возвратно-поступательное движение пневматическим цилиндром 14 (фиг. 3 и 4).
После того, как вильчатые захваты зажали лист, последний переносится в гибочные штампы 7 путем сообщения каретке 9 движения под действием цилиндров 15 и 16 посредством троса 17 и путем,., поворота вала и со стерл нями на 180° в вертикальной плоскости подобно «механической руке.
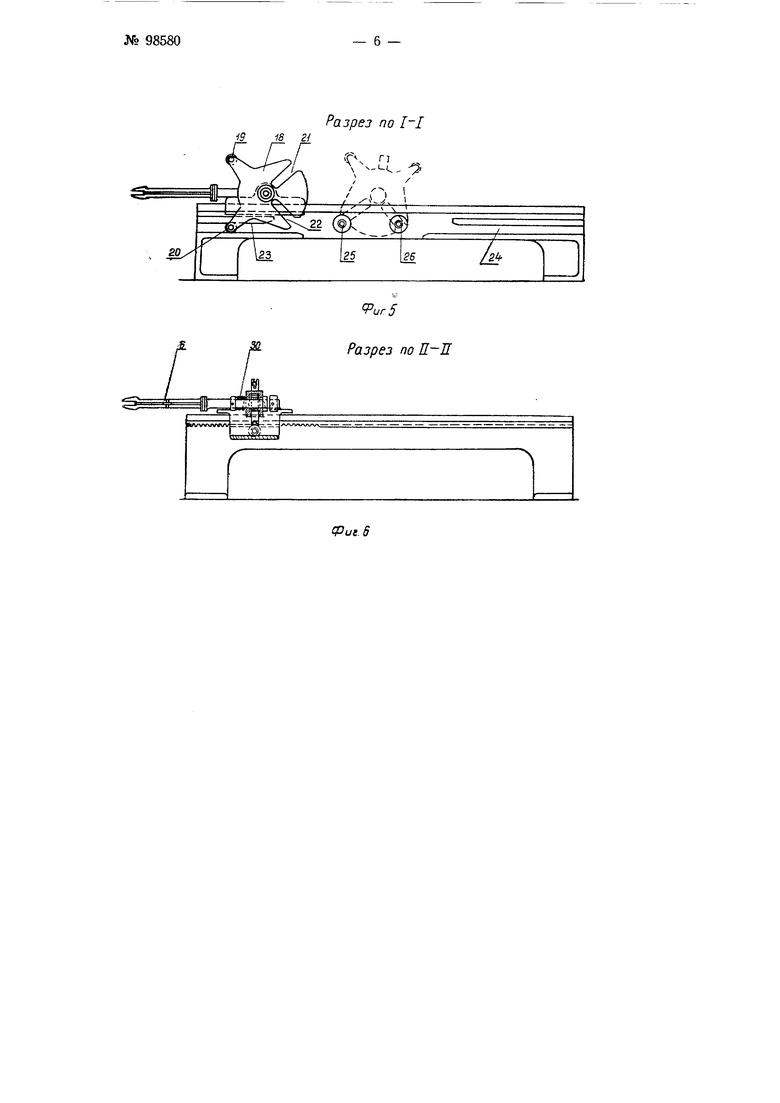
Поворот вала 8 достигается тем, что на его концах жестко укреплены цевочные диски 18, имеющие каждый два отростка с роликовыми ведущими пальцами 19 и 20 id радиальные прорези 21 и 22.
Поступательный путь вала 8 фиксируется следующим образом: при движении каретки 9 в сторону печи / роликовый палец 20 заходит в горизонтальный паз 23 в неподвижных направляющих каретки, а при движении каретки 9 в сторону пресса 2 палец 19 заходит в паз 24.
Поворот же вала 8 вместе со стержнями 6 с вильчатыми захватами в вертикальной плоскости осуществляется тем, что прорези 21, 22 диска 18 на своем поступательном пути встречают пальцы 25, 26, закрепленные в неподвижных направляющих каретки 9.
При повороте дисков 18 стержни 6 в какое-то мгновение занимает вертикальное положение и затем на угле а° (фиг. 1) с цилиндра 14 сбрасывается давление, что приводит к повороту вильчатых захватов вокруг своих осей и занятию ими исходного положения (положение «а на фиг. 7), с освобождением листа 3 от зажима.
Пои движении в направлении к прессу 2 положение листов 3 на угле а° выправляется в продольном направлении, так как они могли
быть неточно уложены на конвейере печи, а подача их з штампы пресса должна быть весьма точной.
Выправление положения листа по длине производится посредством установленных на пути движения вильчатых захватов с листами нескольких, рассчитанных на разные длины листов, изогнутых направляющих планок 27, закрепленных на автоматически откидных шарнирных рычагах, поворотных вокруг оси 28. Эти планки смешают неправильно захваченный лист 3 в ту или другую сторону, выправляя его положение
Например, лист, имеюший длину «б пройдет между планками I и о, лист, имеюший размер «Д, выправляется нланками /и 5. а мешаюш,ие этому листу планки 2, 4 будут откинуты, так как лист предварительно встретится с рычагом 29, нажмет на него, и шарнирная система образует свободный путь для листа.
После того, как стержни 6 пройдут угол и°, в работу вступает цилиндр 14, вильчатые захваты поворачиваются вокруг осей стержней 6, зажимают снова листы 3 и уносят их в штампы 7.
Устройство вступает в работу после того, как лист 3 под воздействием конвейера 5 входит в вильчатые захваты и, нажимая на них, преодолевает действие пружины 30, вследствие чего стержни 6 перемешаются по направлению к валу 8 до захвата собачками 32 за фланцы 31. При этом собачки 32 приводят в действие электрическую цепь пневматического крана, подающего сжатый воздух в правую полость цилиндра 14, а также в цилиндр 16.
После перемещения каретки 9 по направлению к прессу 2 листы 3 входят в штампы 7, собачки 32 отжимаются упором и освобождают фланцы 31, которые под действием пружин 30 прижимают лист 3 к базовой плоскости штампа 7. Замыкаются соответствующие контакты цепи пневматического крана, последний переключается и направляет сжатый воздух в левую полость цилиндра /4 и в цилиндр 15. Вильчатые захваты после этого освобождаются от листов 3 и вместе с кареткой 9 возвращаются в исходное положение.
Предмет изобретения
1.Автоматическое транспортировочно-загрузочное устройство типа «механическая рука для передачи листов, например, автомобильных рессор., из нагревательной конвейерной печи на гибочно-закалочный пресс, с возвратно-поступательно подвижной кареткой, несущей параллельно помещенные на горизонтальном валу стержни с вильчатыми захватами, отличающееся тем, что, с целью осуществления зажима листа, вильчатые захваты стержней каретки расположены на последней попарно и выполнены принудительно поворотными относительно их осей, в противоположных направлениях.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что. с целью сообщения стержням с захватами, в процессе одностороннего движения каретки, поворота на 180° в вертикальной плоскости, на валу стержней с вильчатыми захватами укреплены цевочные диски, снабженные равномерно и попарно размещенными по окружности двумя ведущими пальцами и двумя радиальными прорезями, предназначенными для последовательного взаимодействия с горизонтальными пазами и ведущими пальцами на неподвижных направляющих каретки.
3.Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что, с целью сообщения стержням с вильчатыми захватами поворота в противоположных направлениях, на каждом из пары соседних
- 3 -№ 98580
стержней надеты попарно сцепляющиеся зубчатые сектора, кинематически связанные посредством подпружиненных, противоположно направленных рычагов с двумя параллельными тягами, приводимыми в воз.вратно-поступательное-движение от пневматического цилиндра. I 4. Форма выполнения устройства по пп. 1, 2, 3, отличающаяся тем, что, с целью выправления положения листов рессоры по длине при их переносе стержнями с вильчатыми захватами из печи на пресс, на пути движения захватов с листом установлено несколько, рассчитапных на разные длины листов рессоры в комплекте, изогнутых направляющих планок, закрепленных на системе автоматически откидных шарнирных рычагов.lr
у )
Л Л Т X
,fT 1
Фиг. 4
Разрез по I-1
18 Zi
rC rj -L), - /
/ . 1
Разрез no
Сечение по flfl
