, (S) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ ПАРАМЕТРОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2101844C1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1975 |
|
SU556547A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU771835A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Способ управления электроприводом постоянного тока и устройство для управления электроприводом постоянного тока | 1979 |
|
SU860249A2 |
1
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока с подчиненным регулированием параметров, приводящих во вращение механизмы с возможными резкими стопорениями рабочих органов.
Известно устройство для ограничения тока в системе подчиненного регулирования электропривода, содержащее последовательно включенные регулятор скорости с блоком ограничения в цепи его обратной связи и регулятор тока, подключенные к входам соответствующих регуляторов датчики скорости и тока, и цепь дополнительной обратной связи, которая содержит последовательно соединенные блок возведения в квадрат и блок дифференцирования l3.
Однако это устройство характеризуется отсутствием учета изменения напряжения и величины статического
момента, что не позволяет ограничить удары в передачах, тем самым существенно снижается надежность электроне .ханической системы при возможности возникновения стопорных моментов.
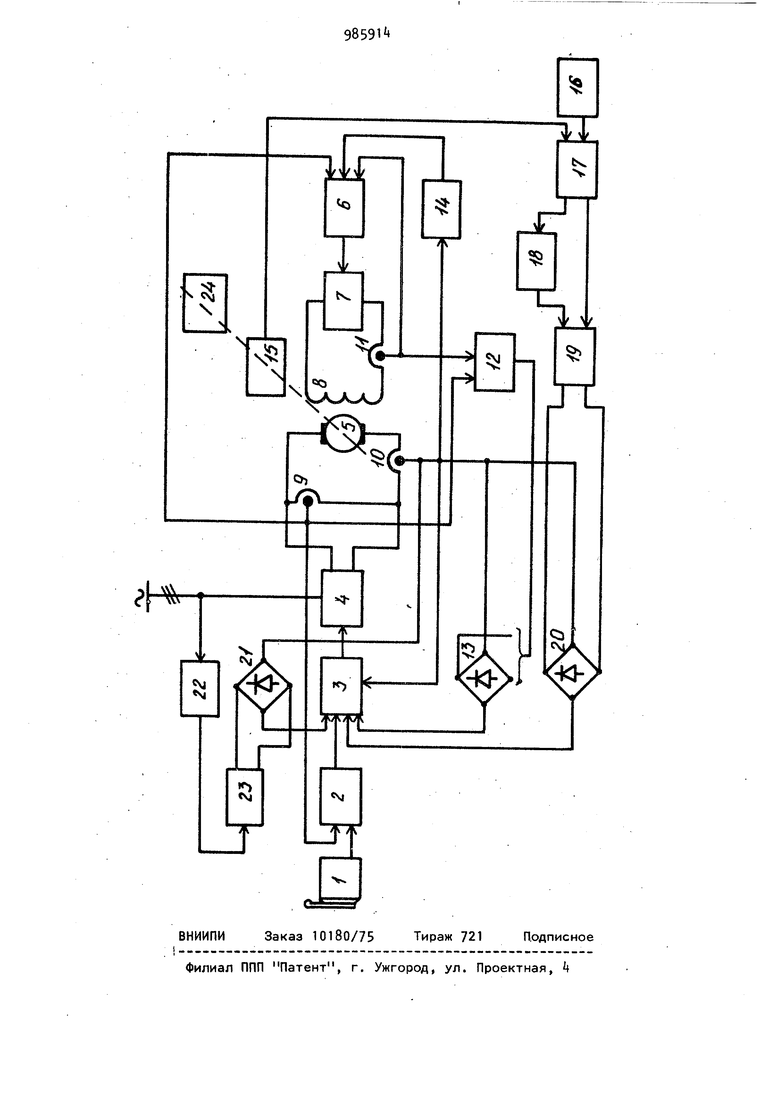
. Известно также устройство для снижения ударов в механизме при повышении быстродействия электропривода и улучшений использования коммутацион° ных возможностей электропривода, содержащее последовательно включенные задающее устройство, регулятор скорости, регулятор тока с подключенными к их входам соответственно датчиками
скорости и тока, вентильный преобразователь, питающий якорную цепь электродвигателя, преобразователь в цепи обмотки возбуждения лектродвигателя, диодный мост, включенный диагональю переменного тока в цепь обратной связи регулятора скорости, . сумматор, к одному из входов которого через первый блок нелинейности под3985ключей датчик тока возбуждения, соединенный с датчиком напряжения первый блок выделения модуля, последовательно соединенные второй блок нелинейности, датчик статического момента электродвигателя, второй блок выделения модуля и пороговый элемент, а так же блок перемножения, второй диодный мост, третий блок нелинейности, третий блок выделения модуля, диод и резисторы, при этом входы второго и третьего блоков нелинейности подключены к датчику тока возбуждения, выход первого блока нелинейности через резистор, шунтирующий первый блок выделения модуля, соединен с вторым входом сумматора, выход которого под ключен к диагонали постоянного тока второго диодного моста, диагональ переменного тока которого включена в цепь обратной связи регулятора тока якоря, выход порогового элемента через второй резистор, шунтированный третьим блоком выделения модуля, входом подключенного к датчику напряжения, соединен с одним из входов блока перемножения, второй вход которого подключен к выходу третьего блока нелинейности, а выход - через диод встречно диагонали постоянного тока первого диодного моста, шунтированного третьим резистором 2. Однако в данном устройстве не учитывается регулирование момента электродви ателя с.упреждением стопорения. Наиболее близким к предлагаемому по технической сущности является эле тропривод постоянного тока с подчинен ным регулированием параметров, содержащий электродвигатель и последовательно соединенные задающий блок, регулятор напряжения на якоре, регулятор тока якоря и управляемый преоб разователь, к которому подключен якорь электродвигателя, последовател но соединенные регулятор тока возбуж дения и возбудитель, к выходу которо го подключена обмотка возбуждения двигателя, а подключенные к вхо дам соответствующих регуляторов датчик напряжения на якоре, датчик тока якоря и датчик тока возбуждения, сум матор, входы которого соединены с да чиком напряжения на якоре и датчиком тока возбуждения, а выход - с диагональю постоянного тока диодного мост при этом входы регулятора возбуждени соединены также с датчиком напряжения на якоре и через блок нелинейности с датчиком тока якоря з. Недостатками известного устройства являются отсутствие учета электроприводом напряженности передач механизма перед стопорением, недостаточность учета влияния только амплитуды напряжения питающей преобразовательный агрегат сети на опрокидывание инверторного режима преобразователя, в то время как большинство приводов постоянного тока выполнено по системе генератор - двигатель. Это приводит к снижению надежности электромеханической системы Стопорящегося механизма. Цель изобретения - повышение надежности механической части привода. Поставленная цель достигается тем, что в электропривод постоянного тока с подчиненным регулированием параметров введены датчик статического момента, последовательно соединенные задатчик максимально допустимого момента, второй сумматор, блок дифференцирования и функциональный преобразователь, а также два диодных моста и последовательно соединенные дат(Чик напряжения сети и анализатор формы напряжения сети, причем датчик .статического момента подключен, к входу второго сумматора, второй выход которого соединен непосредственно с вторым входом функционального преобразователя, выходы которого подключены к диагонали постоянного тока второго диодного моста, выходы анализатора формы напряжения сети соединены с диагональю постоянного тока третьего диодногс моста, а диагонали переменного тока всех диодных мостов включены между датчиком тока якоря и входами регулятора тока якоря. На чертеже изображена структурная схема электропривода. Электропривод содержит последовательно включенные задающий блок 1, рег/лятор 2 напряжения на якоре, регулятор 3 тока якоря и управляемый преобразователь Ц, к которому подключен якорь 5 электродвигателя. В электропривод входят также последовательно соединенные регулятор 6 тока возбуждения и возбудитель 7, к выходу которого подключена обмотка 8 возбудителя, К входам соответствующих ,|эегуляторов подключены датчик 9 напряжения на якоре, датчик 10 тока якоря и датчик 11 тока возб ждения. Входы сумматора 12 соединены с датчиком 9 напряжения на якоре и датчиком 11 токи возбуждения, а его выход с диагональю постоянного тока диодного моста 13. Входы регулятора 6 возбуждения соединены также с датчиком 9 напряжения н.а якоре и через блок I нелинейности с датчикрм 10 тока якоря. Кроме того, электропривод coдepжиt датчик 15 статического момента и последовательно соединенны задатчик 1$ максимально допустимого моментаi сумматор 17, блок 18 дифференцирования и функциональный преобразователь 19, а также два диодных моста 20 и 2V и последовательно соед ненные датчик 22 напряжения сети и анализатор 23 формы напряжения сети, причем датчик 15 статического) коментй подключен к входу сумматора 17 второй выход которого подключен не-; посредственно к второму входу функци онального преобразователя 19, выходы .которого подключены к диагонали постоянного тока диодного моста 20, выходы анализатора 23 формы напряжения сети соединены с диагональю постоянного тока диодного моста 21, а диагонали переменного тока всех диод ных мостов 13, 20 и 21 включены между датчиком 10 тока якоря и входами регулятора 3 тока якоря. Вал электродвигателя соединен с нагрузкой 2Ц Электропривод работает следующим образом. При отсутствии сигнала с выхода задающего блока 1 сигналы на выходах регулятора 2 напряжения на якоре и регулятора 3 тока якоря также отсутствуют и электродвигатель неподвижен С задатчика 16 максимально допустимо го момента на сумматор 17 поступает только лишь задание на максимально допустимый момент, так как нагрузка 2 неподвижна и показание датчика 15 статического момента равно нулю. На выходе блока 18 дифференцирования сигнал отсутствует, так как на его вход подается постоянная величина, определяемая максимально допустимым моментом двигателя. Напряжение, выра батываемое функциональным преобразователем 19, является наибольшим, поскольку определяется полным максимал но допустимым моментом. Это напряжение поступает на диагональ постоянного тока диодного моста 20. На выходе датчика 11 тока возбуждения и датчика 9 напряжения на якоре сигналы равны нулю, поэтому сумматор 12 вырабатывает минимальное напряжение, поступающее на диагональ постоян. ного ока диодного моста 13. С йыхода датчика 22 напряжения питающей сети преобразованный анали-. затором 23 формы напряжения в соответствии с видом управляемого преобразователя Ц сигнал поступает на диодный мост-21. На выходе, анализатора 23 сигнал соответствует амплитуде напряжения сети, если управляемым преобразователем 10 служит тиристорный преобразователь, амплитуде пер1вой гармоники напряжения сети если преобразователем k служит система синхронный двигатель - генератор постоянного тока, и квадрату амплитуды первой гармоники, если преобразователь k выполнен по системе синхронный двигатель - генератор.постоянного тока. Полярности напряжения на входе диодных мостов 13, 20 и 21 и напряжения с датчика 10 тока якоря противоположны. TjK как ток якоря отсутствует и напряжения на диодных мостах 13, 20 и 21 приложены в непроводящем направлении, то сигнал с регулятора 3 тока якоря также отсутствует. В обмотке 8 возбуждения электродвигателя возбудитель 7 поддерживает ток небольшой величины, так как на его вход поступает наименьший сигнал с выхода регулятора 6 тока возбуждения вследствие отсутствия сигналов с датчиков 10 и 9 тока якоря и напряжения. При переводе задающего блока 1 из нулевого положения в положение, определяемоетребуемой скоростью, через регулятор 2 напряжения на якоре и регулятор 3 тока якоря сигнал воздействует на управляемый преобразователь k, на его выходе появляется напряжение и начинается разгон электродвигателя. До выбора зазоров в передача регулятор 3 обеспечивает малый ток якоря,регулятор 6 тока возбуждения ограниченный магнитный поток, и передачи механической системы входят в зацепление мягко, без ударов. Ограничение магнитного потокадостигается благодаря вводу блоком k 79 нелинейности задерживающего действия положительной обратной связи по потоку якоря с датчика 10 токр якоря на вход регулятора 6 тока возбуждения После выбора зазоров ток якоря быстро растет, и благодаря воздействию положительной обратной связи на регулятор 6 напряжение на выходе возбудите ля 7 увеличивается и ток и обмотка 8 возбуждения электродвигателя начинает расти в функции тока якоря, его рост ограничивается насыщением элект4)одвигателя. Величина и скорость нарастания то ка якоря ограничиваются условиями ком мутации, максимально допустимым момен том, величиной напряжения сети. На диодного кюста 13 поступае сигнал с сумматора 12, вырабатываемый по условиям коммутации, определяемым соотношением величин напряжения на якоре и тока возбуждения. На вход диодного моста 21 поступает сигнал с датчика 22 напряжения сети. На вход диодного моста 20 тоже поступает сиг нал, В сумматоре 17 определяется разность между максимально допустимым моментом, задаваемым задатчиком 16 максимально допустимого момента, и статическим моментом на валу электро двигателя. Последний измеряется датчиком 15 статического момента. Эта разность, определяемая допустимым ростом момента, развиваемого электро двигателем, воздействует на функциональный преобразователь 19 непосредственно, а воздействуя на функциональный преобразователь 19 через бло дифференцирования 18 она регулирует нарастание момента с упреждением. Когда разность фактического и заданного значений статического момента мала, а скорость уменьшения этой разности велика, с выхода функционального преобразователя 19 на вход диодного моста 20 поступает малое на пряжение и сравнивается с напряжение с выхода датчика 10 тока якоря. При превышении последним напряжения с выхода функционального преобразователя 19 на регулятор 3 тока якоря воздействует отрицательная обратная связь по току,якоря, напряжение на выходе регулятора 3 тока якоря ограничивается, тем самым ограничивая рост тока якоря и, следовательно, момент на валу электродвигателя. Так как диодные мосты 13, 20 и 21 своими выходами подключены к трем параллельным цепям обратной связи по току якоря, на вход регулятора 3 тока якоря действует та обратная связь, где величина напряжения, приложенного к диодному мосту, наименьшая. При переводе двигателя в режим реверса ток якоря меняет знак, переходя через ноль. При малых токах якоря блок нелинейности задерживает действие положительной обратной связи по току якоря, напряжение на выходе регулятора 6 тока возбуждения мало, также мало напряжение на выходе возбудителем 7, и по обмотке возбуждения 8 течет малый ток. До выбора зазоров реверс двигателя проходит при низких моментах. После выбора зазоров резко возрастает ток якоря, на вход регулятора 6 тока возбуждения действует- положительная обратная связь по теку якоря. Начинается процесс роста тока Еозбуждения в тока якоря так же, как и при разгоне электродвигателя. Аналогичные процессы протекают и при торможении. Если перед торможением, реверсом или при стопорении электродвигатель имеет скорость больше основной и, следовательно, его магнитный поток ослаблен, то, так как в этих режимах магнитный поток растет выше номиналь ноге, значительно возрастает противоЭДС электродвигателя. В случае, когда управляемый преобразователь k является тиристорным преобразователем, возможен режим опрокидывания инвертора ; В предлагаемом электроприводе предусмотрено уменьшение противо-ЭДС двигателя при уменьшении напряжения сети. Уменьшается сигнал на выходе датчика 22 напряжения питающей сети, следовательно, уменьшается напряжение на выходе анализатора 23 формы напряжения. В этом случае оно пропорционально амплитуде питающего напряжения. На вход регулятора 3 тока якоря воздействует отрицательная обратная связь по току якоря с выхода 10 тока якоря, уменьшается ток якоря и, следовательно, противоЭДС двигателя. Отрицательная обратная связь по току якоря на входе регулятора 3 тока якоря, регулируемая в зависимости от существующего статического момен99та и скорости его изменения при помо щи напряжения ограничения на диодном мосте.20, в указанных выше режимах имеет особое значение, так как ток якоря и момент двигате|1 в этих режимах особенно велики. Таким образом, по сравнению с известными предлагаемый электропривод обеспечивает повышение надежности эле тромеханичёской системы стопорящихся механизмов. Формула изобретения Электропривод постоянного тока с подчиненным регулированием параметэов, содержащий электродвигатель итоследовательно включенные задающий элок, регулятор напряжения на якоре зегулятор тока якоря и управляемый преобразователь, к которому подклю-1ен якорь электродвигателя, последовательно соединенные регуляТор тока возбуждения и возбудитель, к выходу которого подключена обмотка возбуждения двигателя, а также подключенные к входам соответствующих регуляторов датчик напряжения на якоре, датчик тока якоря и датчик тока возбуждения, сумматор, входы которого соединены с датчиком напряжения на якоре и датчиком тока возбуждения, а выход - с диагональю постоянного тока диодного моста, при этом входы (эегулятора возбуждения соединены V 10 также с датчиком напряжения на якоре и через блок нелинейности с датчиком тока якоря, отличающийся тем, что, с целью повышения надеж- . ности механической части привода, в него введены датчик статического момента, последовательно соединенные задатчик максимально допустимого момента, второй сумматор, блок дифференцирования и функциональный пре образовательна также второй и третий диодные мосты и последовательно соединенные датчик напряжения сети и анализатор форкы напряжения сети-, причем датчик статического момента подключен к входу второго сумматора, второй выход которого соединен непосредственно с вторым-входом функционального преобразователя, выходы которого подключены к диагонали постоянного тока второго диодного моста, выходы анализатора формы напряжения сети соединены с диагональю постоянного- тока третьего диодного моста, а диагонали переменного тока всех диодных мостов включены между датчиком тока якоря и входами ре гуля-, тора тока якоря. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР If 635584, кл. Н 02 Р 5/06, 1976. 2.Авторское свидетельство СССР f 729800, кл. Н 02 Р 5/06, 1976. 3.Авторское свидетельство СССР № 586131, кл. Н 02 Р 5/26, 1973.
