Изобретение относится к электротехнике и может быть использовано для управления электродвигателями в режимах пуска, торможения и стабилизации скорости электродвигателей.
Целью изобретения является улучшение качества регулирования при одновременном повышении быстродействия.
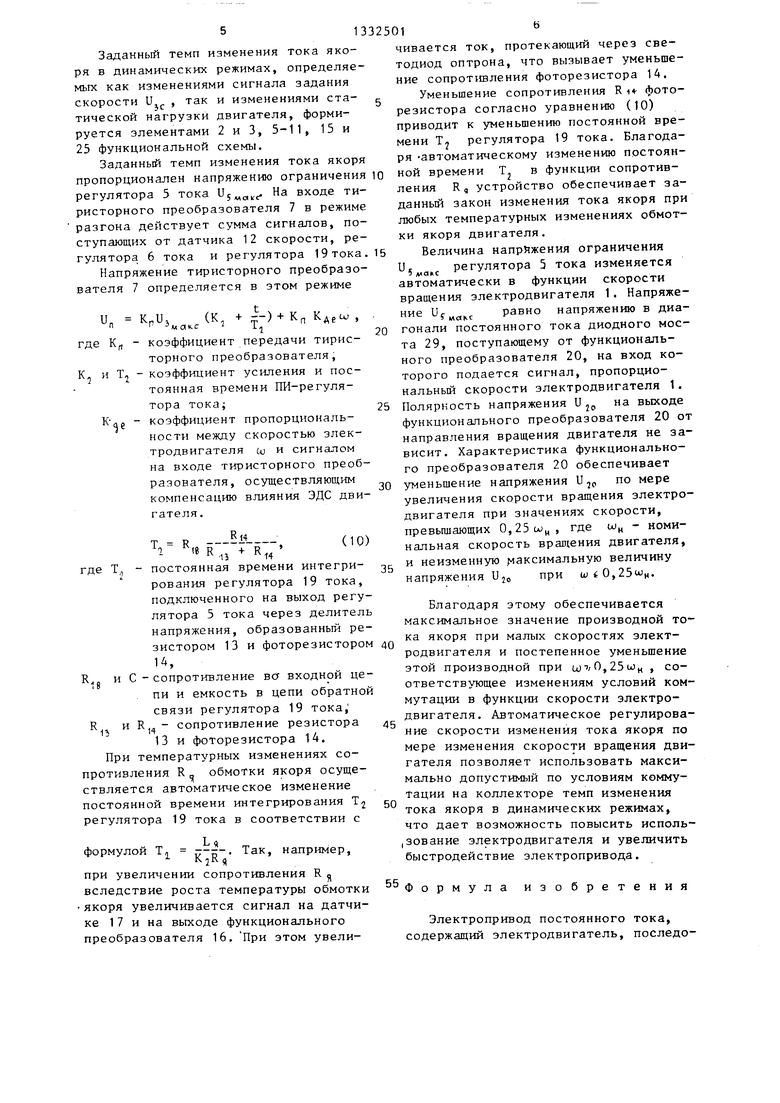
На фиг.1 представлена схема электропривода, на фиг.2 - характеристика первого функционального преобразователя .
Электропривод содержит электродвигатель 1, последовательно соединенные 15 Рости сравниваются заданная и дей
задатчик 2, регулятор 3 скорости с блоком 4 ограничения, регулятор 5 тока, пропорциональный регулятор 6 тока, тиристорный преобразователь 7, ,выход которого подключен к якорной обмотке электродвигателя 1, регулятор 8 пускового тока, один вход которого соединен с задатчиком 2, а выход через два встречно-параллельно включенных диода 9 и 10 соединен с входом регулятора 5 тока, датчик 11 тока, выход которого соединен с входом регулятора 5 тока, датчик 12 скорости, выходом подключенный к входам регулятора 3 скорости и регулятора 8 пускового тока. Кроме того, электропривод содержит резистор 13 (R х ), включенный последовательно с фоторезистором 14 оптрона, светодиод 15 которого через первьш функциональный преобразователь 16 соединен с датчиком 17 температуры обмотки якоря электродвигателя 1. Общая точка между резистором 13 и фоторезистором 14 соединена через резистор 18 (Rexj) с входом интегрального регулятора 19 тока, выходы регуляторов 6 и 19 тока подключены к входу тиристорного преобразователя 7. Выход датчика 12 ско
РОСТИ подключен к входам второго функ- с этих режимов осуществляется релейным
ционального преобразователя 20 и блока 21 вьщеления модуля, включенного последовательно с блоком 22 дифференцирования и релейным элементом 23. Выход последнего подключен к первому . входу блока 24 умножения, второй вход которого соединен с выходом датчика 25 модуля статического момента, выход блока умножения соединен с первым входом сумматора 26, второй вход которого соединен с задатчиком 27 темпа изменения скорости электродвигателя, выход сумматора 26 подключен к диагонали постоянного тока первого диодно50
55
элементом 23, на вход которого с выхода блока 22 дифференцирования поступает производная модуля скорости электродвигателя 1. В режиме разгона электродвигателя 1, согда производная модуля скорости положительная, полярность напряжения на выходе блока 22 дифференцирования и соответствующая ей полярность напряжения на выходах релейного элемента 23 и блока 24 умножения таковы, что напряжение UK
гч
вычитается из напряжения U напряжение на выходе сумматора ределяется зависимостью
т.е. 26 оп
го моста 28, диагональ переменного тока которого включена в цепь обратной связи регулятора 8 пускового тока, в цепь обратной связи регулятора 5 тока диагональю переменного тока включен второй диодный мост 29, диагональ постоянного тока которого соединена с выходом второго функционального преобразователя 20.
Электропривод работает следующим образом.
Во входной цепи регулятора 3 ско
0 0
ствительная скорость электродвигателя 1, которые пропорциональны напряжению задания скорости Ujj , поступающему с задатчика 2, и напряжению U на выходе датчика 12 скорости, поступающим на его вход. Блок 4 ограничения в цепи обратной связи регулятора 3 скорости ограничивает напряжение U на его выходе максимальным значением и. , которое пропорционально зада MlXkC
нию максимально допустимого значения тока якоря. Напряжения U и U(,c сравниваются также во входной цепи регулятора 8 пускового тока. Напряже- 0 ние ограничения этого регулятора равно напряжению на диагонали постоянного тока диодного моста 28, которое пропорционально разности или сумме сигналов на входах сумматора 26. На первый вход сумматора 26 подается
5
напряжение Uj згдания темпа изменения скорости (ускорения) электродвигателя 1. На второй вход сумматора 26 поступает напряжение Цц, модуль которого пропорционален моменту статической нагрузки электродвигателя 1, а полярность зависит от того, имеет место режим разгона или режим торможения электродвигателя 1. Выделение
этих режимов осуществляется релейным
элементом 23, на вход которого с выхода блока 22 дифференцирования поступает производная модуля скорости электродвигателя 1. В режиме разгона электродвигателя 1, согда производная модуля скорости положительная, полярность напряжения на выходе блока 22 дифференцирования и соответствующая ей полярность напряжения на выходах релейного элемента 23 и блока 24 умножения таковы, что напряжение UK
гч
из напряжения U на выходе сумматора зависимостью
т.е. 26 опUn 2.) K,,(L4, - ,,М,),
(1)
где М - статически момент двигателя;Kj, К. и К,, - коэффициенты усиления соответственно блока 24 умножения, датчика 25 и сумматора 26.
В режиме разгона электродвигателя 1, когда сигнал задания скорости U значительно превышает сигнал . , регуляторы 3 и 8 работают в режиме ограничения, т.е. на выходе регулятора 3 скорости имеется максимальное нап- ряжение U, ,j. , а на выходе регулятора 8 пускового тока - максимальное напряжение П равное напряжению
э .«.ai4c на выходе сумматора 26 U. .
/ ь
Задание на ток якоря в режимах разгона и торможгняя пропорционально разности напряжр ги11 на выходах регуляторов 3 и 8.
Задание на ток якоря в режиме разгона I
ЗР определяется зависимостью
I/,, KI/UIVJ
Зр J 3
I-1P К(и,- и,„,, ), (2) где К - коэффициент пропорциональности, или с учетом уравнения (1)
+ K,K.,Kj,M,).
(3)
Момент электродвигателя 1 М в режиме разгона пропорционален току 1,р . Как следует из уравнения (3), по мере роста статического момента К ,ток I }р и момент электродвигателя 1 М, возрастают. При этом обеспечивается неизменное заданное значение динамического момента в режиме разгона
М,
М q - М ,
(4)
АПК t С
не з исящее от статического моме} та Mj,, т.е. заданный неизменный темп изменения скорости электродвигателя 1
dw dtI
где I - момент шерции электропривода.
(5)
В тех случаях, когда задание тока якоря в режиме разгона по уравнению (3) вследствие значительного роста статического моме}1та М может превысить максимально допустимое по условиям коммутации на коллекторе значение, в цепь обратной связи регулятора 8 должен быть включен дополнительно узел нерегулируемого ограничеНИН, исключающий чрезмерное увеличение задания тока 1. .
В режиме торможения, когда производная модуля скорости отрицательная, полярность напряжения на выходе блока 22 дифференцирования изменяется на обратную. Это приводит к изменению полярности сигналов на выходе релейного элемента 23 и блока 24 умножения, т.е. в режиме торможения сигнал и суммируется с сигналом Uj и па- пряжение на выходе сумматора 26 определяется зависимостью и 24, KjtCU, -t- и J к ,fc(U jv| + X М).(6)
Задание на ток якоря в режиме торможения I
;т
подобно рассмотренному
для режима разгона, определяется соотношением (2) или с учетом уравнения (6)
Зт
к(и,
макс
М
Kj4 К. ) .
(7)
По мере роста статического момента ток Ij и тормозной момент электродвигателя MQ уменьшаются. Благодаря этому поддерживается неизменное заданное значение динамического момента в режиме торможения
М
дин
М + MC
(8)
и .соответствующий этому моменту постоянный темп изменения скорости электродвигателя в режиме торможения
35
du) Мдии dt I
(9)
40
45
50
не зависящие от статического момента М и равные динамическому моменту и темпу изменения скорости в режиме разгона.
В конце процесса разгона при приближении действительного значения скорости электродвигателя и. к заданному разность сигналов Uj(- и U на входе регулятора 8 уменьшается настолько, что напряжение на входе этого регулятора полностью гасится в прямом сопротивлении диодов 9 и 10, т.е. регулятор 8 тока перестает влиять на работу устройства. Изменения момента статической нагрузки при неизменном сигнале задания скорости
и
зс
благодаря высокому быстродей55
ствию системы не приводят к существенному отклонению действительной скорости от заданной, поэтому регулятор 8 пускового тока не оказывает влияния на работу системы в этом режиме .
Заданный темп изменения тока якоря в динамических режимах, определяемых как изменениями сигнала задания скорости U.j, , так и изменениями статической нагрузки двигателя, формируется элементами 2 и 3, 5-11, 15 и 25 функциональной схемы.
Заданный темп изменения тока якоря
2 ления R, устройство обеспечивает за
пропорционален напряжению ограничения 10 ной времени Т в функции сопротив- регулятора 5 тока U,,, На входе ти- ристорного преобразователя 7 в режиме разгона действует сумма сигналов, поступающих от датчика 12 скорости, регулятора 6 тока и регулятора 19 тока. 15
Напряжение тиристорного преобразователя 7 определяется в этом режиме
данный закон изменения тока якоря пр любых температурных изменениях обмот ки якоря двигателя.
Величина напряжения ограничения и, регулятора 5 тока изменяется
автоматически в функции скорости вращения электродвигателя 1. Напряже u( , . ние и,-, равно напряжению в диа
Un KpU,
(К, -ь -)-К, К
Де
КKfl - коэффициент передачи тиристорного преобразователя,
и Т - коэффициент усиления и постоянная времени ПИ-регуля- тора тока;
коэффициент пропорциональности между скоростью электродвигателя (у и сигналом на входе тиристорного преобразователя, осуществляющим компенсацию влияния ЭДС двигателя.
т т R
5 it.
+ R.
(10)
-11 М4
где Т,, - постоянная времени интегрирования регулятора 19 тока, подключенного на выход регулятора 5 тока через делитель напряжения, образованный ре30 уменьшение напряжения U j, по мере увеличения скорости вращения электродвигателя при значениях скорости, превышающих 0,25tAj , где Шц - номи35
н нальная скорость вращения двигателя,
и неизменную максимальную величину напряжения Uj, при ,25шц.
45
Благодаря этому обеспечивается максимальное значение производной тозистором 13 и фоторезистором 40 °Р скоростях элект- 4родвигателя и постепенное уменьшение
этой производной при ы- /0,25юц , соответствующее изменениям условий коммутации в функции скорости электродвигателя. Автоматическое регулирование скорости изменения тока якоря по мере изменения скорости вращения двигателя позволяет использовать максимально допустимый по условиям коммутации на коллекторе темп изменения тока якоря в динамических режимах, что дает возможность повысить использование электродвигателя и увеличить быстродействие электропривода.
К и С - сопротивление вс входной цеI D
пи и емкость в цепи обратной связи регулятора 19 тока, R и R,- сопротивление резистора
13 и фоторезистора 14. При температурных изменениях сопротивления R о обмотки якоря осуществляется автоматическое изменение постоянной времени интегрирования Т2 регулятора 19 тока в соответствии с
50
формулой Т. --Г-. Так, например, KjKq
при увеличении сопротивления R „ вследствие роста температуры обмотки якоря увеличивается сигнал на датчике 17 и на выходе функционального преобразователя 16. При этом увели55
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, последечивается ток, протекающий через све- тодиод оптрона, что вызывает уменьшение сопрот1шления фоторезистора 14.
Уменьшение сопротивления R i фоторезистора согласно уравнению (10) приводит к уменьшению постоянной времени Tj регулятора 19 тока. Благодаря -автоматическому изменению прстоян2ления R, устройство обеспечивает заной времени Т в функции сопротив-
10 ной времени Т в функции сопротив- 15
данный закон изменения тока якоря при любых температурных изменениях обмотки якоря двигателя.
Величина напряжения ограничения и, регулятора 5 тока изменяется
автоматически в функции скорости вращения электродвигателя 1. Напряже- . ние и,-, равно напряжению в диа20 гонали постоянного тока диодного моста 29, поступающему от функционального преобразователя 20, на вход которого подается сигнал, пропорциональный скорости электродвигателя 1.
25 Полярность напряжения Uj на выходе функционального преобразователя 20 от направления вращения двигателя не зависит. Характеристика функционального преобразователя 20 обеспечивает
30 уменьшение напряжения U j, по мере увеличения скорости вращения электродвигателя при значениях скорости, превышающих 0,25tAj , где Шц - номи35
н нальная скорость вращения двигателя,
и неизменную максимальную величину напряжения Uj, при ,25шц.
55
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, последе10
яательно соединенные задатчик, тор скорости с блоком ограничения, регулятор тока, а также тиристорный преобразователь, выход которого подключен к якорной обмотке электродвигателя, регулятор пускового тока, один вход которого соединен с задат- чиком, а выход через два встречно-па- раялельно включенных диода соединен с входом регулятора тока, датчик тока электродвигателя, выход которого соединен с входом регулятора тока, датчик скорости электродвигателя, выходом подключенный к входам регуля- 15 тора скорости, регулятора пускового тока и тиристорного преобразователя, отличающийся тем, что, с целью улучшения качества регулирования при одновременном повышении быстродействия, он дополнительно снабжен пропорциональным регулятором тока, интегральным i .гулятором тока, первым функциональным преобразователем, реализующим зависимость
20
и
вих
где а
L. г . А С; а гриндуктивность якоря электродвигателя-,
коэффициент усиления пропорционального регулятора тока; -55 jxj -входные резисторы интегрального регулятора тока-,
А,В и С- коэффициенты пропорциональности,
вторым функциональным преобразоватеR
«Л
г и R,
лем, двумя диодными мостами, блоком выделения модуля, блоком дифференцирования, релейным элементом, датчиком
1332501Н
регуля- модуля статического момента двигателя, множительным устройством, сумматором, оптроном, резистором, датчиком Р- температуры обмотки якоря, задатчиком темпа изменения скорости электродвигателя, причем выход регулятора тока соединен с входом пропорционального регулятора тока и резистором, включенным последовательно с фоторезистором оптрона, светоДиод которого через первый функциональный преобразователь соединен с датчиком температуры обмотки якоря двигателя, общая точка между резистором и фоторезистором соединена с входом интегрального регулятора тока, выходы второго и третьего регуляторов тока подключены к входу тиристорного преобразователя, выход датчика скорости подключен к входу второго функционального преобразователя и входу блока выделения модуля, включенного последовательно с блоком дифференцирования и релейным элементом, выход релейного элемента подключен к первому входу блока умножения, второй вход которого соединен с выходом датчика модуля статического момента, выход блока умножения соединен с первым входом сумматора, второй вход которого соединен с задатчиком темпа изменения скорости двигателя, выход сумматора подключен к диагонали постоянного тока первого диодного моста, диагональ переменного тока которого включена в цепь обратной связи регулятора пускового тока, в цепь обратной связи регулятора тока диагонально переменного тока включен второй диодный мост, диагональ постоянного тока которого соединена с выходом второго функционального преобразователя.
25
L,
К
30
40
10
15
Р-
15
20
Р-
15
Р-
25
грегуля-Р-
L,
К
30
Р-
40
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Устройство зависимого управления потоком возбуждения электродвигателя постоянного тока | 1981 |
|
SU1072750A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Двухзонный вентильный электропривод | 1980 |
|
SU928578A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1987 |
|
SU1436257A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями в режимах пуска, торможения и стабилизации скорости. Улучшение качества регулирования при одновременном поввппении быстродействия достигается введением двух регуляторов тока 6,19, двух функциональных преобразователей 16, 20, датчика 25 модуля статического момента. Функциональный преобразователь 20 включен между датчиком скорости 12 и регулятором тока 5. Функциональный преобразователь 16 включен между датчиком температуры 17 и регулятором тока 19, а датчик 25 модуля статического момента подключен к входу регулятора 8 пускового тока. В данном устройстве обеспечивается поддержание заданного темпа изменения скорости электродвигателя при изменениях статического момента и изменение режима работы при отработке задания по скорости. 2 ил. (Л Ujc со со ю ел moL
Редактор О.Юрковецкая
Составитель М.Кряхтунова Техред И.Попович
3846/54
Тираж 659 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор П.Бескид
Подписное
| Лебедев Е.Д | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока.- М.: Энергия, 1970, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
| Электропривод постоянного тока | 1981 |
|
SU1005256A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
