(5) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ
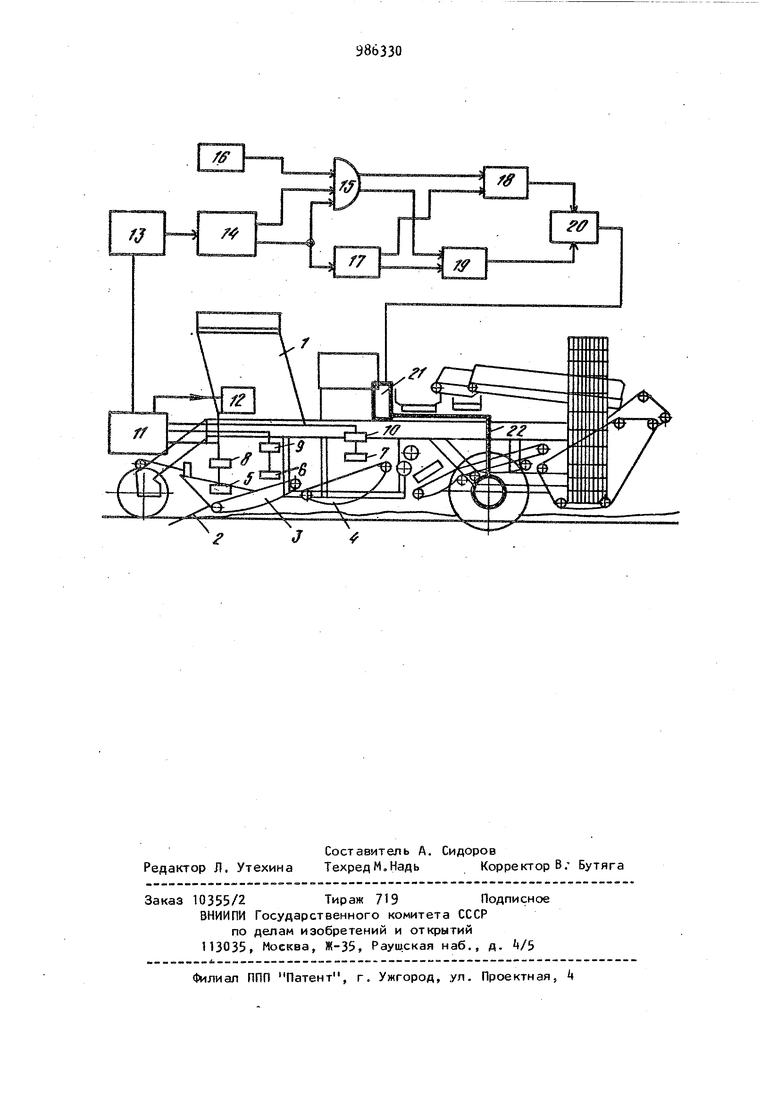
И УПРАВЛЕНИЯ ЗАГРУЗКОЙ КОРНЕКЛУБНЕУБОРОЧНОЙ Изобретение относится к сельскохозяйственному машиностроению, а име но к системам автоматического управ ления загрузкой, в частности, картофелеуборочных комбайнов. Известно устройство для автоматического регулирования режимов работы картофелеуборочного комбайна, содержащее диски вариатора скорости, соединенного посредством передаточно го механизма с Приводом исполнительного органа, где передаточный механизм выполнен в виде взаимодействующих с шестерней и расположенных под прямым углом одна к другой реек, одм на из которых соединена с подвижным диском вариатора, а другая снабжена кривошипом, который соединен с приводом исполнительного органа tl 3. Недостатком известного устройства является зависимость от момента привода элеватора, который в о&цем случае определяется не общей загМАШИНЫрузкой сепарируюи ей массы, а ее сгру живанием в начале элеватора. Кроме того, нкциональные возможности устройства ограничены, так как регулировка касается только привода элеватора. Наиболее близким по технической сущности к изофетения является устройство для автоматичесокго контроля и управления загрузкой корнеклубнеуборочной машины, содержащее датчи и технологического контроля загрузки рабочих органов, связанные через демпфирующие элементы и блок сложения с индикатором и схемой преобразования слогич ескими элементами И и ИЛИ и подключенный к схеме преобразования исполнительный механизм t.. 8 нем схема преобразования выполнена двухканальной и представляет собой аналогодискретный регулятор нижнего и верхнего уровней управлеHHflj замкнутой через объект регулирования обратной связью. Недостатками известного устройства являются сложность cxeMJ преобразования, включающей ряд логических элементов, а также недостаточная эффективность регулирования и низкая точность, так как входной параметр оценивается по двум критическим уровням недогрузки и перегрузки рабочих органов. Цель изобретения - повышение эффективности управления и.точности выбора оптимального режима загрузки рабочих органов, Поставленная цель достигается тем что в предложенном устройстве схема преобразования снабжена блоком квантования уровня сигнала блоком опреде знака производной, тактовым задатчиком, дополнительным логическим элементом И и триггером. Выход блока сложения соединен со входом блока квантования схемы преобразования, выход которого подключен к блоку определения знака производной, пер вый и второй выходы которого связаны со вторым и третьим выходами элемента ИЛИ, к первому входу которого подключен тактовый задатчик, к третьему входу элемента ИЛИ также подсоединен вход триггера. Один выход элемента ИЛИ подключен к первому входу элемента И, а другой - к первому входу дополнительного элемента И, выходы которых соединены с исполнительным ме ханизмом. Ко вторым входам элементов И подключены соответственно первый и второй выходы триггера. На чертеже представлена схема пре ложенного устройства. На корнеклубнеуборочной машине 1 над рабочими ор анами 2- установлены датчики технологического контроля загрузки которые через демпфирующие элементы 8-10 соединены с блоком сложения 11. С блока сложения информация подается на сигнальный индикатор 12, установленный на пульте комбайнера, С другого выхода блока сложения 11 суммарный сигнал подается на вход блока квантования 13 и далее на блок определения знака производной 1А. Елок И связан одним выходом с элементом ИЛИ. 15, к другим входам которого соответственно подсоединены тактовый зада.тмик 16 и второй выход блока Il, а также триггер 17. Выходы элемента ИЛИ 15 и триггера 17 через элементы И 18 и 19 соединены с исполнительным механизмом 20, например реверсивным электроприводом, кинематически связанным с рейкой управления насоса 21 гидротрансмиссий привода ведущих колес 22. Устройство работает следующим образом. Рабочие сигналы с датчиков после демпфирования на элементах 8-10 поступают в блок сложения 11, откуда они по одному каналу направляются на сигнальный индикатор 12, установленный на пульте комбайнера, а по другоt поступают на вход блока квантования 13 схемы преобразования, построенной по принципу экстрвемального шагового регулятора. Допустим, вначале движения сигнал с выхода блока сложения 11 равен нулю (клубненосная масса еще не поступает на рабочие органы).В процессе настройки рабочая точка регулятора nepejj мещается по статистической характеристике. При пересечении некоторого уровня срабатывает пороговое устройство блока квантования 13 уровня и на выходе блока 13 формируется скачок напряжения. При пересечении уровня снизу вверх образуется положительный перепад напряжения, при пересечении сверху вниз - отрицательный. Блок 1 формирует из ступенчатых сигналов прямоугольные импульсы. В зависимости от направления перемещения точки по статистической характеристике импульсы проходят на разные выходы блока И. Когда точка перемещается по статической характеристике в сторону максимума, состояние триггера 17 таково, что сигнал с него поступает на элемент И 18, а сигналы с первого выхода блока И через элемент ИЛИ 15 вместе с тактовыми импульсами проходят на выход элемента И 18. Запускается электропривод исполнительного механизма 20,изменяется режим работы насоса 21,масло поступает в гидротранс| 1ссию привода ведущих колес 22, скорость машины 1 увеличивается, и, следовательно, клубненосная масса начинает поступать на рабочие органы 2- и загрузка машины 1 увеЛичивается. Увеличение загрузив рабочих органов,через датчики 5-7, демпфирующие
элементы8-10 и блок сложения 11 {Приводит к дальнейшему перемещению точки статистической характеристики в направлении экстремума. Перемещение рабочей точки на пологих участках характеристики, лежащей между ypOBHflwi квантования., осуществляется за счет тактовых импульсов задатчика 16. Если рабочая точка пе-рейдет экстремальное значение характеристики и пересечет (1лижайший от максимума уровень сверху вниз, т появится сигнал :на втором выходе блока .
Триггер 17 перебросится, сигнал поступит на вход элемента И 19 и будет воздействовать в сторону уменьшения на электрЬпривод исполнительного механизма 2р. Приэтом загрузка комбайна снизится, и рабочая точка на статистической характеристике вновь переместится к экстремуму. В результате скорость исполнительного механизма увеличивается при удалении от экстремума рабочей точки и замедляется при подходе к нему.
Таким образом, осуществляется огюрати-вный поиск оптимального режима загрузки рабочих органов машины, повышается ее производительность и уменьшается количество повреждений клубней картофеля. Фор)ула изобретения Устройство для автоматического контроля и управления загрузкой корнеклубнеуборочной машины, содержащее датчики технологического контроля 40 загрузки рабочих органов, связанные
{через демпфирующие элементы и блок сложения с индикатором и схемой преобразования с логическими элементами И и ИЛИ и подключенный к схеме преобразования исполнительный еханизм, отличающееся тем, что, с целью повышения эффективности управления игточности выбора оптимального режима загрузки рабо:чих органов, схема преобразования .снабжена блоком квантования уров|ня сигнала, блоком определения знака производной, тактовым задатчи ком, дополни тельным логичес о м элементом И и триггером, причем выход блока сложения соединен с входом блока квантования схемы преобразования, выход которого подключен к блоку определения знака производной, первый и второй выходы которого связаны с вторым и третьим выходами элемента ИЛИ, к первому входу которого пЬдключен тактовый задатчик, при этом к третьему входу --элемента ИЛИ также
подсоединен вход триггера, один выход элемента ИЛИ подключен к первому входу элемента И, а другой - к первому входу дополнительного элемента И, выходы которых соединены с исполнительным механизмом, причем к вторым входам элементов И подключены соответственно первый и второй выходы триггера. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 615881, кл. А 01 b 33/00, 1976. 2. Авторское свидетельство СССР If 701569, кл. А 01 О , 1977 ;(прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования квадрупольного масс-спектрометра | 1989 |
|
SU1795419A1 |
| Экстремальный шаговый регулятор | 1972 |
|
SU468216A1 |
| Экстремальный шаговый регулятор | 1972 |
|
SU456253A1 |
| Система автоматического управления барабанной мельницей | 1986 |
|
SU1386302A1 |
| Устройство для определения экстре-МАльНыХ зНАчЕНий СлучАйНыХпРОцЕССОВ | 1978 |
|
SU805358A1 |
| Экстремальный регулятор | 1978 |
|
SU744452A1 |
| Устройство для автоматического управления температурным режимом в теплице | 1984 |
|
SU1405729A1 |
| Дискретный регулятор (его варианты) | 1980 |
|
SU960728A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |