1
Изобретение относится к станко- строению и может быть использовано
в станках с числовым программным управлением и промышленными роботами.
Цель изобретения - повышение надежности системы и конструктивного ее упрощения.
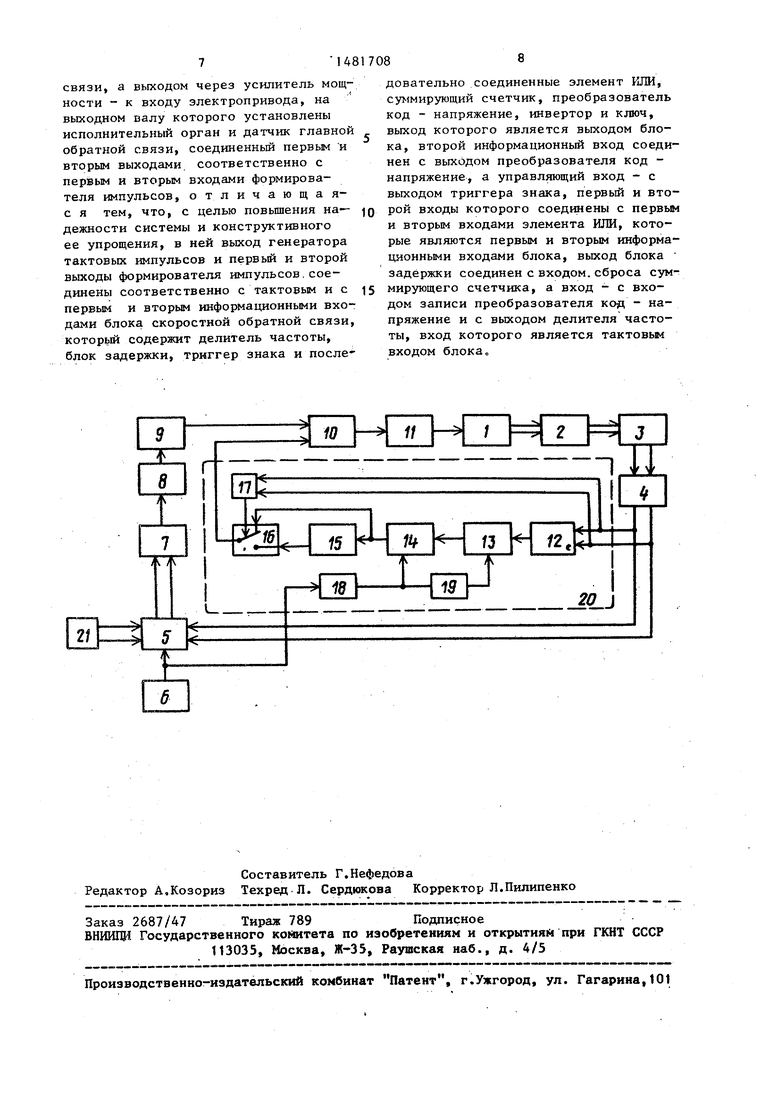
На чертеже показана функциональная схема системы
Система содержит электропривод 1, исполнительный орган 2, датчик 3 главной обратной связи, формирователь 4 импульсов, блок 5 коммутации, генератор 6 тактовых импульсов, реверсивный счетчик 7, преобразователь 8 код - напряжение, регулятор 9 положения, регулятор 10-скорости, усилитель 11 мощности, элемент ИЛИ 12, суммирующий счетчик 13, преобразователь 14 код - напряжение, инвертор 15, ключ 16, триггер 17 знака, делитель 18 частоты, блок 19 задержки, блок 20 скоростной обратной связи и программный задатчик 21.
Система работает следующим образом.
Регулируемой величиной в данной системе является угол поворота вала исполнительного органа 2. В ней осуществляется замкнутый принцип регулирования. Б связи с этим имеется главная отрицательная обратная связь по положению исполнительного органа 2, реализованная с помощью датчика 3 главной обратной связи , формирователя 4 импульсов и блока 5 коммутации. Регулируемая величина изменяется по закону, заданному программой обработки изделия на станке, сформированной в программном задатчике 21. Сигнал задания в зависимости от направления обработки подается на один из входов блока 5 коммутации, пройдя который, он поступает либо на суммирующий, либо на вычитающий вход реверсивного счетчика 7. Этот сигнал представляет собой унитарный код, т0е0 последовательность импульсов, число которых пропорционально заданному программой перемещению, а частота следования пропорциональна требуемой скорости углового перемещения исполнительного органа 2. По цепи главной обратной связи по положению на вход реверсивного счетчика 7 через блок 5 коммутации поступает такая же последовательность импульсов, уменьшающая содержание реверсивного счетчика 7 на число импульсов, пропорциональное отработанному перемещению. Разностный код, фиксируемый реверсивным счетчиком 7, преобразуется в постоянное напряжение в преобразователе 8 код - напряжение и подается на вход регулятора 9 положения
Для обеспечения требуемых динамических характеристик системы (т.е. быстродействия, перерегулирования, запаса устойчивости по фазе и амплитуде) в ее состав вводятся
0 корректирующие элементы и связи. В данной системе такими корректирующими элементами являются регулятор 9 положения, регулятор 10 скорости и блок 20 скоростной обратной связи, содер5 жащий элемент ИЛИ 12, суммирующий счетчик 13, преобразователь 14 код - напряжение, инвертор 15, ключ 16, триггер 17 знака, делитель 18 частоты и блок 19 задержки. Регулятор 9
0 положения и регулятор 10 скорости реализуются на основе серийно выпускаемых электрических регулирующих блоков, реализующих различные законы регулирования (пропорциональный П, ин5 тегральный И, дифференциальный Д, комбинированный ПИД). Чаще всего регулятор 9 положения реализует ПИД-за- кон регулирования, а регулятор 10 скорости - П-закон регулирования. В
0 общем случае регуляторы 9 и 10 положения и скорости имеют несколько входов. В данной системе регулятор 10 скорости осуществляет суммирование двух сигналов: сигнала, характеризую- щего рассогласование в системе, и сигнала местной обратной связи, пропорционального скорости изменения выходной координаты системы, т.е. в системе реализуется положительная скорост-
о нал обратная связь.
На выходе датчика 3 главной обратной связи формируются две последовательности импульсов, сдвинутые по фазе на четверть периода, Формирова5 тель 4 импульсов представляет собой логический блок, который на основе анализа очередности поступления импульсов на его два входа определяет направление перемещения исполнительного органа 2 и в зависимости от направления формируют импульсные сигналы на на своем соответствующем выходе.
Для того, чтобы исключить возможность неправильной работы реверсивног го счетчика 7 в результате одновременного поступления -импульсов на оба его входа, предусмотрен блок 5 коммутации. Он обеспечивает наличие обязательного временного интервала между
0
импульсами, поступающими на входы сложения и вычитания реверсивного счетчика. Этот интервал составляет не менее половины периода тактовых импульсов, поступающих на тактовый вход блока 5 коммутации с выхода генератора 6 тактовых импульсов. Ка входы блока 5 коммутации одновременно подаются три последовательности импульсов: на первый или второй ин- формационные входы поступают программные импульсы задания, на третий или четвертый информационный входы поступают импульсы отработки и на тактовый вход подаются тактовые импульсы.
Реверсивный счетчик 7 представляет собой счетчик с двумя раздельными информационными входами. При подаче импульсов на один из входов про- исходит их суммирование, а при подаче на второй происходит вычитание. Суммирующий счетчик 13 имеет один информационный суммирующий вход, соединенный с выходом элемента ИЛИ 12. Вход Сброс суммирующего счетчика 13 - это управляющий вход, который соединен с выходом блока 19 задержки.
Преобразователь 14 код - напряже- ние в отличие от преобразователя 8 код - напряжение содержит встроенный регистр памяти. Информация записывается в него из суммирующего счетчика 13 в момент подачи выходного сиг- нала делителя 18 частоты на вход За-пись преобразователя 14 код - на- пряжение.
В статическом режиме импульсы на выходах формирователя 4 импульсов от- сутствуют, суммирующий счетчик 13, сбрасываемый периодически выходными сигналами делителя 18 частоты, пребывает в нулевом состоянии. На выходе преобразователя 14 код - напряжение имеет место нулевой сигнал. В динамическом режиме в зависимости от направления движения исполнительного органа 2 появляются импульсы на одно из выходов формирователя 4 импуль- сов. Их количество за интервал, опре деляемый периодом следования импульсов с выхода делителя 18 частоты, оказывается пропорциональным текуще4му значению производной углового перемещения исполнительного органа 2, Пропорциональным той же величине оказывается выходной сигнал преобразователя 14 код - напряжение, в который
10
15
4817086
вводится код суммирующего счетчика 13 перед его сбросом. Момент сброса суммирующего счетчика 13 и момент пе- с резаписи преобразователя 14 код - напряжение разделяются интервалом времени и блоком 19 задержки.
В зависимости от направления движения исполнительного органа 2 импульсы присутствуют только на одном выходе формирователя 4 импульсов, поэтому в конце каждого такта, определяемого делителем 18 частоты, состояние триггера 17 знака, управляемого по разным входам, несет в себе информацию о знаке производной. Триггер 17 знака определяет состояние ключа 16 и поэтому сигнал на выходе последнего определяется величиной и знаком производной. Этот сигнал и подается на второй вход регулятора 10 скорости.
Из описания принципа действия предложенного блока 20 скоростной обратной связи, т.е. тахопреобразова- теля, следует, что он практически безынерционен. Сигнал на его выходе появляется через период следования импульсов делителя 18 частоты, который может быть сделан достаточно малым. Он не требует специальных механических сопряжений его с выходным валом электропривода 1, что приводит к конструктивному упрощению данной системы. Надежность его намного выше широко используемых электромеханических устройств типа тахогенератора постоянного тока, что приводит к повышению надежности системы.
Формула изобретения
Система программного управления электроприводом, содержащая блок коммутации, соединенный первым и вторым информационными входами с первым и с вторым выходами программного задат- чика, третьим и четвертым информационным входами - с первым и вторым выходами формирователя импульсов, а тактовым входом - с выходом генератора тактовых импульсов, и первым и вторым выходами - с суммирующим и вычитающим входами реверсивного счетчика, подключенного выходом через преобразователь код - напряжение к входу регулятора положения, соединенного выходом с первым входом регулятора скорости, подключенного вторым входом к выходу блока скоростной обратной
связи, а выходом через усилитель мощности - к входу электропривода, на выходном валу которого установлены исполнительный орган и датчик главной обратной связи, соединенный первым и вторым выходами соответственно с первым и вторым входами формирователя импульсов, отличающая- с я тем, что, с целью повышения надежности системы и конструктивного ее упрощения, в ней выход генератора тактовых импульсов и первый и второй выходы формирователя импульсов соединены соответственно с тактовым и с первым и вторым информационными входами блока скоростной обратной связи, который содержит делитель частоты, блок задержки, триггер знака и последовательно соединенные элемент ИЛИ, суммирующий счетчик, преобразователь код - напряжение, инвертор и ключ, выход которого является выходом блока, второй информационный вход соединен с выходом преобразователя код - напряжение, а управляющий вход - с выходом триггера знака, первый и второй входы которого соединены с первым и вторым входами элемента ИЛИ, которые являются первым и вторым информационными входами блока, выход блока задержки соединен с входом.сброса сум5 мирующего счетчика, а вход - с входом записи преобразователя код - напряжение и с выходом делителя частоты, вход которого является тактовым входом блока„
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1272507A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Цифровая следящая система | 1980 |
|
SU934446A1 |
Изобретение относится к станкостроению и может быть использовано в станках с числовым программным управлением и промышленными роботами. Целью изобретения является повышение надежности системы и конструктивное ее упрощение. Поставленная цель достигается за счет особенности выполнения блока скоростной обратной связи на базе элементов вычислительной техники. Система состоит из электропривода, вал которого связан с исполнительным органом и импульсным датчиком главной обратной связи, выходы которого соединены с входами формирователя импульсов, а через него - с входами блока коммутации, подключенного к выходам генератора тактовых импульсов и программного задатчика. Выход блока синхронизации через последовательно соединенные реверсивный счетчик, преобразователь код-напряжение, регуляторы положения и скорости, соединен с входом усилителя мощности, выход которого подключен к входу электропривода. Выход генератора тактовых импульсов через делитель частоты и блок задержки связан с входом "Сброс" суммирующего счетчика, информационный вход которого подключен через блок ИЛИ к выходам формирователя импульсов. Выход суммирующего счетчика соединен с информационным входом дополнительного преобразователя код-напряжение, вход записи которого подключен к выходу делителя частоты, а выход соединен первым информационным входом ключа. Второй информационный вход ключа подключен к выходу преобразователя код-напряжение через инвертор, а выход - к второму входу регулятора скорости. Управляющий вход ключа соединен с выходом триггера знака, раздельные входы которого соединены с выходами формирователя импульсов. 1 ил.
| Смирнов В.И., Петров Ю.А„, Ра- зинцев В.И | |||
| Основы проектирования и расчета следящих систем | |||
| М.: Машиностроение, 1983, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| и Соколовский Г.Г | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с.255- 259. | |||
