(54) ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вибровозбудителем | 1981 |
|
SU1012064A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Электродинамический вибратор | 1977 |
|
SU659199A1 |
| Электродинамический вибратор | 1980 |
|
SU977047A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1991 |
|
RU2016667C1 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Электродинамический вибратор | 1990 |
|
SU1741925A1 |
| Система управления вибровозбудителем | 1984 |
|
SU1171763A1 |
| Электродинамический вибратор | 1979 |
|
SU835528A1 |
Изобретение относится к вибрационной технике и может быть использовано в стендах для виброиспытаний различных объектов.
Известен электродинамический вибратор, содержащий электродинамический возбудитель и систему управления, в котором обеспечивается удовлетворительная точность пере.мещения объекта со столс « возбудителя по сигналу, поступающему из задающего генератора СII..
Однако и таком вибраторе отсутствует возможность стабилизации или управленияс силовым воздействием по заданной программе.
Наиболее близким по технической сути к изобретению является электро- J pIHaмичecкий вибратор, содержащий магнитопровод с обмоткой подмагничивания, подключенной к источнику питания постоянного тока, установленную в воздушном зазоре магнитопровода ПОДВИЖЙ5ГЮ катушку, длина которой больше длины воздушн6г.о зазора магнитопровода, подключенного к выходу усилителя мощности, блок дифференцирования, подсоединенный к датчику перемещения подвижной катушки и суммирующему усилителю, к которому также подключены посотедовацельно соединенные между собой за.дающий генератор и блок управленияС23, с Однако в вибраторе не обеспечивается удовлетворительная точность получения Зсщанного силовЪго воздействия на объект и особенно заданной формы колебаний при наличии JQ сигнальных и параметрических возмущений. К этим возмущениям следует отнести нелинейности и нестационарности электрокэханических и прочих характеристик и параметров вибратора и испытуемого объекта, а
15 также внешние силовые воздействия на вибратор и объект. Этот недостаток объясняется тем, что в известном устройстве используются блоки линейности коррекции, которые выпол20няют свою функцию обеспечения заданных форм силового воздействия на объект и колебаний лишь в малом диапазоне изменения возмущений.
Целью изобретения является повы2Sшение точности воспроизведения заданного силового воздействия на испытуемый объект при наличии сигнальмых и параметрических возмущений.
Поставленная ъ,елъ достигается тем,
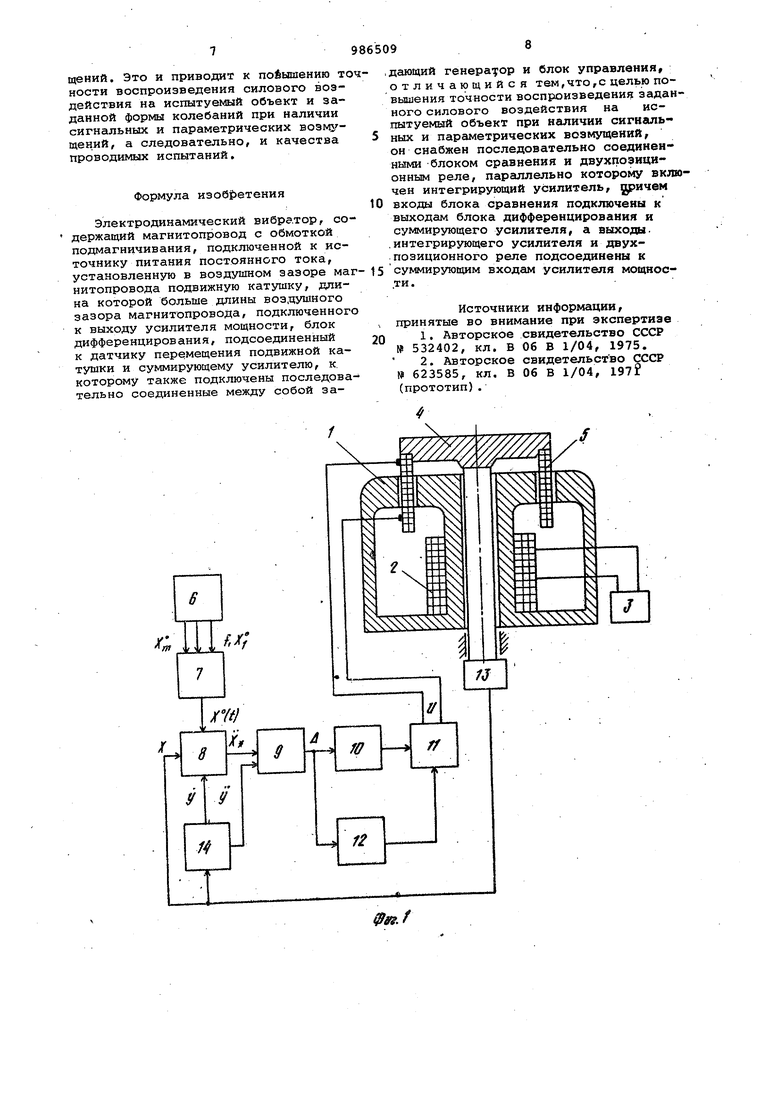
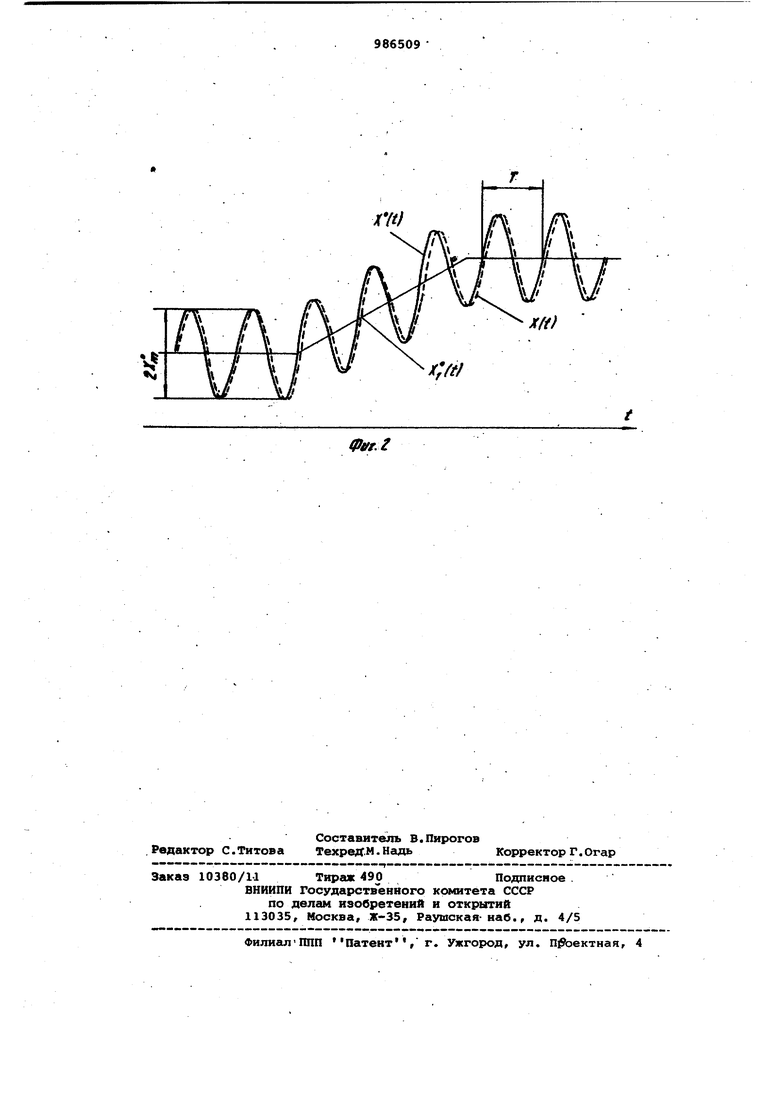
30 что электродинамический вибратор снабжен последовательно соединенными блоком сравнения и двухпозицйонным реле, параллельно которому включен интегрирующий усилитель, причем входы блока сравнения подсоединены к выходам блока дифференцирования и суммирующего усилителя, а выходы интегрирующего усилителя и двухпозиционного реле подсоединены к суммирующим входам усилителя мощности. На фиг.1 изображена функциональная схема электродинамического вибратора; на фиг.2 - осциллограмма перемещения подвижной катушки. Электродинамический вибратор содержит магнитопровод 1 с, обмоткой подмагничивания 2, подключенной к источнику постоянного тока 3, подвижную катушку 4, имеющую, например, цилиндрическую обмотку 5, последовательно соединенные между собой блок управления б, задающий генератор 7, 20 суммирующий усилитель 8, блок сравнения 9, двухпозиционное реле 10 и усилитель мощности 11, подключенный к подвижной катушке 4. Вибратор также содержит инте: ирующий усилитель 12, 25 включенный параллельно реле 10, датчик перемещения 13 подвижной катушки 4, подсоединенный ко йторому входу суммирующего усилителя 8 и входу блока дифференцирования 14, выходы ко- 30 торого подключены к входам суммирующего усилителя 8 и блока сравнения 9. Блок управления выполняет функцию задатчика амплитуды, частоты, формы колебаний и необходимого за- 35 кона изменения силового воздействия на испытуемый объект. Устройство работает следующим образом.. Уравнений динамики вибратора за- Q писываются в виде ILO+JR-U . тх-«-Р1х.хД или .(nix+FU,x.t) 45 tf(x,x,x,t)+B(t)U, f(.k,x,t}-;;-F(x,x,t)-n;:((X,X,t); BUl-TSff.
де X - выходная величина
(перемещение подвижной катушки 4); 55
и - напряжение управления на выходе блока 11;
I . - ток в обмотке 5;
L, R - индуктивность и активное сопротивление обмотки 5 соответственно;
F(x, X, t) - механические силы,
воздействующие на 5 от ме ци с В ус бл (п ны мо си ур бы Х гд ур ми ни
).(4):
де Л - величина рассогласования (ошибки) на выходе бЯока сравнения 9;
±и - уровни ограничений на выходное напряжение реле 10; - измеренное значение ускорения подвижной катушки на выходе блока 14; Кч - коаффицивит передачи блока 11. подвижную катушку 4; Р - электродинамическое тяговое усилие; m - масса подвижной части вибратора; b - конструктивный параметр (коэффициент электромагнитной жесткости); t - время. ависимость функций V и В от t жает наличие сигнальных и параических возмущений. устройстве реализуется принуправления по вектору скорости ганизацией скользящих режимов. ответствии с этим суммирующий итель 8 выполняет функцию а задания желаемого значения )-й производной выходной величигде п - порядок математической ли (1), (2) вибратора. В случае соидальных колебаний желаемогЬ нения движения {см.фиг.2) может сконструировано линейным, вида , - (x(t)-X))-T Z ay. X(t)X UHX°Sinu)t, Ws 2Jf , (3) x, f - амплитуда и частота колебаний соответственно; 3of TO - желаемые значения коэффициента демпфирования и постоянной времени соответственно; x°(t) - заданное колебательное движение; x°(t) - медленно меняющаяся составляющая колебательного движения; х - желаемое значение ускорения (п-1)-й производной выходной величины; у - измеренное значение скорости перемещения подвижной катушки 4 (на выходе блока 14). ля подчинения движения вибратора нению (3) на выходе блока 11 форется следующий алгоритм управле:Если выполняются условия попадания траекторий cиcтe 4ы управления на поверхность Л 0 ° и существования скользящего режима на ней, то с момента возникновения скольжения реализуется движение Д(,х,х,х)0, которое удовлетворяет желаемому диф ференциальному .уравнейию (3) и не з висит от силовых возмущений нелиней ности и нестационарностей характери тик и параметров электродинамическо вибратора (его электромеханической схемы). При этом для нормальной работы предлагаемого устройства необходимо дополнительно вьтолнить следуюгцие условия: 1 I IO-TO, I где /u, - малый параметр, определяющи 4 быстродействие блока диффер цирования 14. В качестве схемы реального ддаффёренцирования (блок 14) удобно использовать бнстродействуимдай дифференцирукяций фильтр с передаточной функцией WplMPJ U P + b P+l)- .(5) Этот вибратор относится к класс систем с разделяемыми движениями. .нем всегда структурным преобразова ем можно вьвделить быстродействуннци контур поддержания производной, в котором локализуется проявление во мущений и свойств объекта угфавления. Для приближенного анализа динамики вибратора можно использовать .методы/разделения движений и гармонической линеаризации. В этом случае уравнения динамики быстры д |Ижений запишутся следующим образом в операторной форме: Л -р«виН(Л,)Мр( ( &°.р -в(;-ий л°)-ч(,.х. где Д - гармоническая составляющая ошибки; Л°, О - медленно менянвдиеся со тавляющие смоибки и выходного напряжения соответственно;/q - коэффициент гармоничес кой линеаризации; А - амплитуда высокочастот ных автоколебаний в ко туре. Параметры автоколебаний можно определить из анализа уравнений (6), (7) по методу гармонического балаяса, приняв B const в корёстности желаемого значения . Поскольку ьи автоколебаний d д / а yu. выбирается из условий , lO/:i Tj , где Tj мин минимальное значение эл ктромагнитной постоянной вибратора то высокочастотные пульсации на выходе пренебрежимо малы. Контур работает при болыоих гармонических сигналах на/его входе, поэтому устройство оказывается менее чувствительным к психехам, менее критичным к неучтенным малым инерционностям. Это также приводит к повьваению точности работы электродинамического.вибратора. При включении интегрирующего усилителя 12 параллельно реле 10 уравнения для гармонических .и медденно меняющихся составляккцих примут вид: a(V4(A.4)p)-6(t). «р(Мр)) /кХ Лй) Р)--V pKp-Vt. где К-1 - коэффициент лередачи интегрирующего усилителя 12. Из уравнения (9) следует, что при и х const Таким образом,и 0 независимо от вида функции /. Это приводит к .усилению свойства инвариантности злектрот .динамического вибратора к возмущениям. Введение новых блоков в з лектродинамический вибратор позволило исключить узел подвески по; вижной катушки 4 н тем самом упростить систему управления. Вибратор обеспечивает .обработку, с заданными качеством как требуемой формы колебаний и ах амплитуды, так и требуемого закона изменения силового воздействия на объект (при i. const пропорционального медленно меняющегося составляющей) при действии возмущающих фактоtfFров V(x,x,x,t), где FX fj Таким образом, при введении в электродинамический вибратор блока срсшнения, реле и интегрирующего усилителя с сортветствуюооохн связями образуется быстродействующий контур управления, работакшщй в скользящем режиме, в которс л обеспечивается локализгихия и быстрое парирование сигнальных и параметрических возмущений. Это и приводит к повышению т ности воспроизведения силового воздействия на испытуемый объект и заданной формы колебаний при наличии сигнальных и параметрических зозмущений, а следовательно, и качества проводимых испытаний. Формула изоб| етения Электродинамический вибратор, со держащий магнитопровод с обмоткой подмагничивания, подключенной к источнику питания постоянного тока, установленную в воздушном зазоре ма нитопровода подвижную катушку, длина которой больше длины воздушного зазора магнитопровода, подключенног к выходу усилителя мощности, блок дифференцирования, подсоединенный к датчику перемещения подвижной катушки и суммирующему усилителю, к. которому также подключены последова тельно соединенные между собой задающий генератор и блок управления, отличающийся тем, что, с целью повышения точности воспроизведения заданного силового воздействия на испытуемый объект при наличии сигнальных и параметрических возмущений, он снабжен последовательно соединенными блоком сравнения и двухпозиционным реле, параллельно которому включен интегрирующий усилитель, ичем входы блока сравнения подключены к выходам блока дифференцирования и суммирующего усилителя, а выходы. интегрирующего усилителя и двухпозиционного реле подсоединены к суммирующим входам усилителя мощности . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 532402, кл. В Об В 1/04, 1975. 2.Авторское свидетельство СССР № 623585, кл. В 06 В 1/04, 197 (прототип).
.1
