Изобретение относится к управлению двигателямивозвратно-поступательного
движения, используемых в системах электропривода поршневых компрессоров и насосов, устройств перемешивания растворов, вибраторов и других устройств, включаюш,их эти двигатели.
Известна система управления электромаг нитным компрессором, содержащая датчик положения якоря двигателя, задаюш,ий генератор и блок управления, включаюш,ий усилитель сигнала рассогласования, интегрирующий усилитель, блок сравнения и усилитель мощности, выходы- которого подключены к обмоткам компрессора 1.
Недостатками указанной схемы являются малая область устойчивости и сильная зависимость формы колебаний якоря двигателя от величины и характеристики нагрузки, нестационарности электромеханических и прочих характеристик двигателя.
Известно также устройство для управления двухобмоточным двигателем возвратно-поступательного движения, содержащее датчик положения якоря, блок дифференцирования, подключенный к датчику положения, последовательно соединенные между собой блок перемножения, связанный с датчиком перемещения через блок дифференцирования, суммирующий блок, усилитель сигнала управления и блок усилителя мощности, подключенный к обмоткам двигателя 2.
Недостатком этого устройства является невозможность воспроизведения синусоидальной формы колебаний с требуемой точностью, что приводит к снижению КПД устройства и снижению его функциональных возможностей.
Цель изобретения - расщирение функциональных возможностей путем воспроизведения синусоидальных колебаний и повышения точности их воспроизведения.
Указанная цель достигается тем, что устройство дополнительно снабжено двумя усилителями-задатчиками, дополнительным усилителем, суммирующим усилителем, двумя квадраторами и программным блоком, причем первый квадратор подсоединен входом к первому выходу блока дифференцирования и выходом к первому входу первого усилителя-задатчика, который своим выходом подсоединен к первому входу суммирующего усилителя, выход Которого через дополнительный усилитель подсоединен к первому входу блока перемножения, второй квадратор входом подсоединен к датчику положения и выходом ко второму входу суммирующего усилителя, второй усилительзадатчик подсоединен выходом ко второму входу суммирующего блока и первым входом к датчику положения, второй выход олока дифференцирования подсоединен к третьему входу суммирующего блока, а программный блок своими выходами соединен
со вторыми входами усилителей-задатчиков и третьим входом суммирующего усилителя. На чертеже представлена схема устройства управления двухобмоточным двигателем возвратно-поступательного движения.
Устройство управления двухобмоточным двигателем возвратно-поступательного движения содержит блок перемножения 1, суммирующий блок 2, усилитель сигнала управQ ления 3, блок усилителя мощности 4, двухобмоточный двигатель возвратно-поступательного движения 5, датчик положения якоря ,6, блок дифференцирования 7, первый квадратор 8, первый усилитель-задатчик 9, суммирующий усилитель 10, второй квадра5 тор 11, программный блок 12, дополнительный усилитель 13, второй усилитель-задатчик 14. Одна обмотка двигателя подключена к блоку усилителя мощности через первый усилитель мощности 15, а другая через инвертор 16, и второй усилитель мощности 15
Устройство работает следующим образом.
Для приведения якоря двигателя в колебательное движение на обмотки двигателя
5 5 подается напряжение, которое формируется по сигналам программного блока 12, поступающего на входы суммирующего усилителя 10 и усилителей-задатчиков 9 и 14. Причем на вход суммирующего блока подается сигнал пропорциональный отрицательному
0 значению квадрата - А амплитуды колебаний якоря двигателя на вход первого усилителя-задатчика 9 сигнал пропорциональный значению на вход второго усилителя-задатчика 14 сигнал пропорциональный uJ, заданная частота колеба5 НИИ якоря двигателя. Датчик положения якоря 6 на выходе выдает сигнал х пропорциональный положению якоря.
В начальном состоянии Х Хо и усилитель 3 отключен от входной цепи усилителем мощности 15. При этом сигнал управления (ошибки) на входе блока 2 пропорционален величине При подключении усилителя 3 ко входу усилителя мощности 15 на выходе последнего появляется усиленный сигнал напряжения управления U(o)., который при5 кладывается к силовой обмотке двигателя 5 и приводит к возникновению тягового усилия и перемещению якоря двигателя 5. В процессе перемещения якоря на выходах блока дифференцирования 7 появляются сигналы, пропорциональные скорости X и
0 ускорению X движения (у и у соответственно) . При этом на выходе суммирующего усилителя 10 формируется сигнал
Uio Si X2+W-2..v. - А2, который затем усиливается в of раз усилителем 13 и поступает на вход блока пере5 множения 1, на другой вход которого поступает сигнал Y (оценка скорости перемещения якоря двигателя 5). Далее сигнал с выхода блока перемножения 1 Ui, пропорциональный произведению с(. Si V поступает на вход суммирующего блока 2, на другие выходы которого поступают сигналы у ( с выхода блока дифференцирования 7) ии).Х (с выхода усилителя-задатчика 14). В результате на выходе блока 2 формируется сигнал управления Uj, (ошибки)
Ut - Ki(Y+ 2X+dSiY) - КгЛ, который затем усиливается усилителями 3 и 15 и прикладывается к обмотке двигателя в виде напряжения управления U: U KvKi5-Ui.
Изменение напряжения управления U в процессе перемещения якоря двигателя 5 приводит к соответствующему изменению тягового усилия таким образом, чтобы обеспечить стремление , Это стремление обеспечивается благодаря больщйм коэффициентам усиления усилителей 3 и 13. Запуск устройства возможен и при замкнутой цепи управления - плавным увеличением от О напряжения, пропорционального А на выходе программного блока 12.
Таким образом, введение новых блоков в устройство с соответствующими связями обеспечивает формование алгоритма управления как функции координат состояния таКИМ образом, что траектория движения всей системы в целом (устройства управления в совокупности с двигателем) были близки к заданным в требуемом диапазоне регулирования параметров колебаний и изменения силовых параметрических возмущений.
Расширение функциональных возможностей путем воспроизведения синусоидальных колебаний и повышения точности их воспроизведения проявляется в том, что при введении в устройство для управления двигателем возвратно-поступательного движения новых блоков с соответствующими связями обеспечивается подчинение двигателя заданному дифференциальному уравнению, рещением которого являются фазо5вые траектории желаемого гармонического колебательного процесса, а это приводит к повыщению точности воспроизведения синусоидальной формы колебаний в заданном рабочем диапазоне регулирования частоты
0 и амплитуды. Положительный эффект также проявляется в том, что воспроизведение синусоидальных колебаний во многих случаях применения предлагаемого устройства приводит к повышению КПД всей системы электропривода в целом.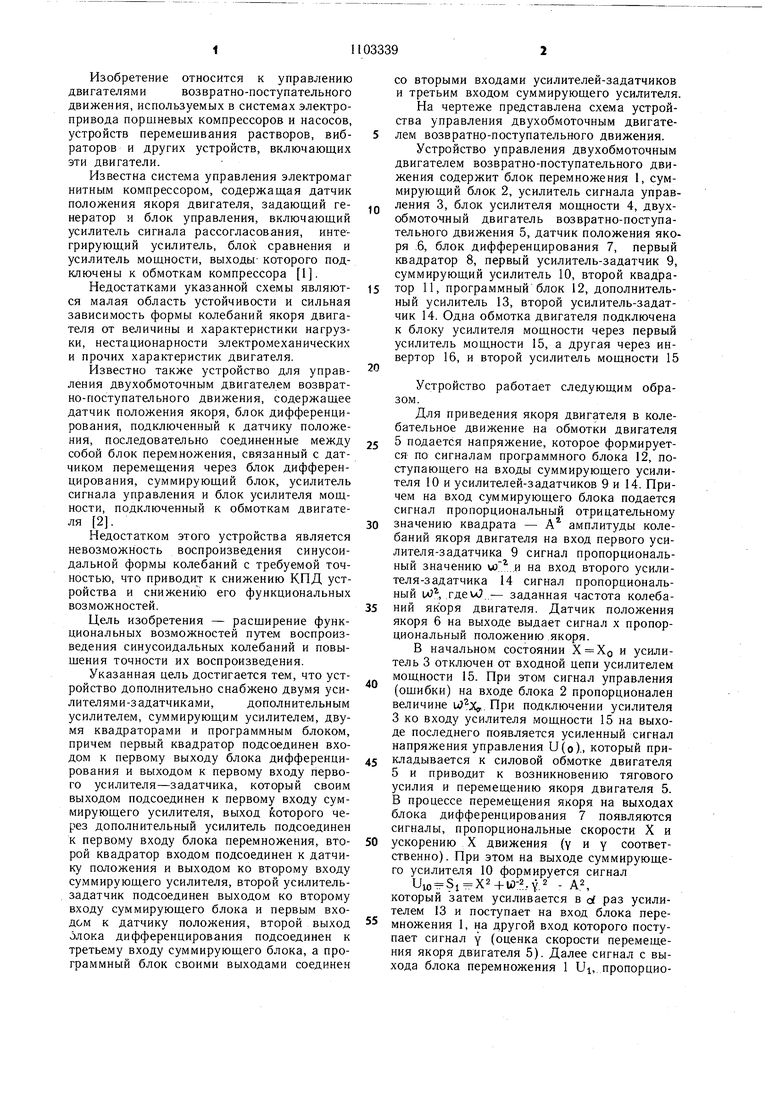

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Устройство для управления вибровозбудителем | 1981 |
|
SU1012064A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения (его варианты) | 1984 |
|
SU1241404A1 |
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| Система управления электромагнитнымКОМпРЕССОРОМ | 1979 |
|
SU827842A1 |
| Система управления вибровозбудителем | 1984 |
|
SU1171763A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| Электромагнитный привод поступательного движения | 1983 |
|
SU1130905A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХОБМОТОЧНЫМ ДВИГАТЕЛЕМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖИМИЯ, содержащее датчик положения якоря, блок дифференцирования, подк.1юченный к датчику положения, последовательно соединенные между собой блок перемножения, связанный с датчиком перемещения через блок дифференцирования, суммирующий блок, усилитель сигнала управления и блок усилителя мощности, подключенный к обмоткам двигателя, отличающееся тем, что, с целью расщирения функциональных возможностей путем воспроизведения синусоидальных колебаний и повыщения, точности их воспроизведения, устройство снабжено двумя усйлителями-задатчиками, дополнительным усилителем, суммирующим усилителем, двумя квадраторами и программным блоком, причем первый квадратор подсоединен входом к первому выходу блока дифференцирования и выходом к первому входу первого усилителя-задатчика, который своим выходом подсоединен к первому входу суммирующего усилителя, выход которого через дополнительный усилитель подсоединен к первому входу блока перемножения, второй квадратор входом подсоединен к датчику положения и выходом к второму входу суммирующего усилителя, второй усилитель-задатчик подсоединен выходом к второму входу суммирующего блока и первым входом к датчику положения, второй выход блока дифференцирования подсоединен к третьему входу суммирующего блока, а программный блок своими вь1ходами соединен с вторыми входами усилителей-задатчиков и третьим входом суммирующего усилителя. o(S( оо САЭ 00 ;о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КОМПРЕССОРОМ | 0 |
|
SU387139A1 |
| кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления электромагнитнымКОМпРЕССОРОМ | 1979 |
|
SU827842A1 |
| кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
