1
Изобретение относится к электротехнике и может быть использовано при построении систем электропривода возвратно-поступательного движения виброустановок и машин виброударного действия.
Известен электропривод возвратнопоступательного движения, содержащий электромагнитный двигатель с обмотками подмагничивания и управления, магнитопроводом и ферромагнитным якорем, последовательно соединенные датчик скорости перемещения якоря и усилительное устройство, подключенное к обмоткам управления, а также источник постоянного тока, подсоединенный к обмоткам подмагничивания. Усилительное устройство содержит предварительный и оконечный усилители. Предварительный усилитель снабжен блоком стабилизации амплитуды колебаний ферромагнитного якоря 1.
Недостатком указанного устройства является неустойчивость среднего положения якоря, где результирующая электромагнитная сила равна нулю. Для обеспечения работоспособности такой электропривод должен быть снабжен упругой системой подвески якоря, а это ухудшает его статические и динамические характеристики. Указанное устройство также не обеспечивает достаточно высокой точности воспроизведения заданных перемещений якоря при действии на него силовых возмущений, особенно при работе электропривода в апериодическом режиме.
Наиболее близок к изобретению по назначению и технической сущности электропривод возвратно-поступательного движения, содержащий электромагнитный двигатель с двумя обмотками управления, и ферромагнитным якорем, датчик положения якоря, последовательно соединенные программный блок, блок формирования требуемой производной сигнала, блок сравнения, к выходу которого подключены два реле, причем первое реле, связанное выходом с первой обмоткой, подключено через инвертор, а второе, соединенное выходом с второй обмоткой, подключено непосредственно, к датчику положения подключен вход блока дифференцирования, выход второй производной которого подключен к второ36295 2
му входу блока сравнения, а другие вькоды подсоединены к входам блока формирования требуемой производной z.
5 известном устройстве обеспечивается повышение точности воспроизведения заданных движений якоря и расширение области устойчивости всеуго электропривода в целом за счет
to .того, что в нем обеспечивается орга-т низация быстродействующего разветвленного контура поддержания требуемой производной вькодной величины (перемещения якоря), работаюи{его в
15 скользящем режиме (режиме высокочастотных автоколебаний). В этом контуре осу1цествляется локализация и быстрое парирование силовых возмущений и свойств двигателя, как
20 нелинейного и структурно неустойчивого объекта управления, что и приводит к расширению области устойчивости известного электропривода и повьшению точности воспроизведе-
25 ния заданных перемещений якоря.
Однако известный электропривод обладает недостаточно широким рабочим частотным диапазоном. Максимальная рабочая частота колебаний якоря в
30 нем примерно в JO раз меньше частоты автоколебаний в контуре поддержания требуемой производной и не превышает 20-30 Гц. Это ограничивает область применения известного устройст5
Целью изобретения является расширение области применения за счет увеличения диапазона рабочих частот.
0 Поставленная цель достигается
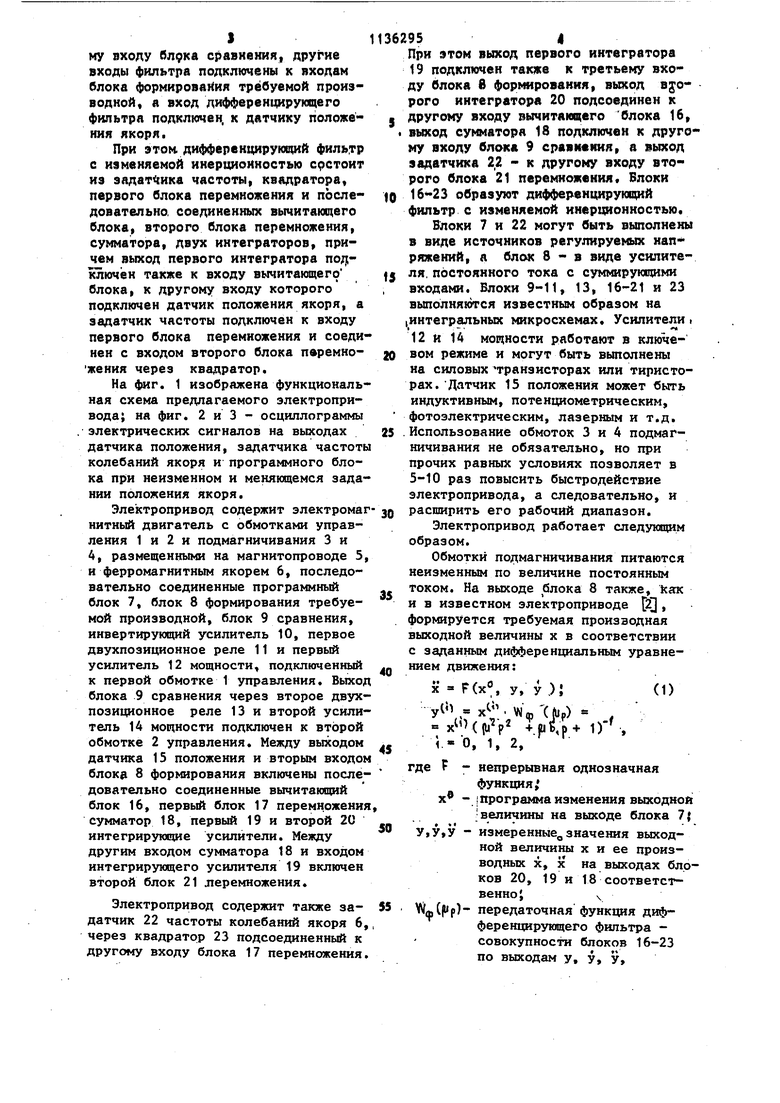
тем, что в электропривод возвратнопоступательного движения, содержащий электромагнитный двигатель с двумя обмотками управления и ферромагнитным якорем, датчик положения якоря, последовательно соединенные программный блок, блок формирования требуемой производной сигнала, блок сравнения, к выходу которого подключены два реле, причем первое реле, соединенное выходом с одной обмоткой, подкл очено через инвертор, а второе, соединенное выходом с второй обмоткой, - непосредственно, введен дифференцирующий фильтр с изменяемой инерционностью, имеющий выходы сигнала и его производных, причем выход второй производной подключен к второму входу блфка сравнения, другие входы фильтра подключены к входам блока формирования требуемой производной, а вход Д1 еренцирующего фильтра подключен, к датчику положения якоряI При этом дифференцирующий фильтр с изменяемой инерщюнностью срстоит из задат4ика частоты, квадратора, первого блока перемножения и последовательно, соединенных вычитающего блока, второго блока перемножения, сумматора, двух интеграторов, причем выход первого интегратора поцключ1ен также к входу вычитающего блока, к другому входу которого подключен датчик положения якоря, а задатчик частоты подключен к входу первого блока перемножения и соединен с входом второго блока паремножения через квадратор. На фиг. 1 изображена функциональная схема предлагаемого электропривода; на фиг. 2 и 3 - осциллограммы электрических сигналов на выходах датчика положения, задатчика частоты колебаний якоря и программного блока при неизменном и меняющемся задании положения якоря. Электропривод содержит электромаг нитный двигатель с обмотками управления 1 и 2 и подмагничивания 3 и 4, размещенными на магнитопроводе 5, и ферромагнитным якорем 6, последовательно соединенные программный блок 7, блок 8 формирования требуемой производной, блок 9 сравнения, инвертирующий усилитель 10, первое двухпозиционное реле 11 и первый усилитель 12 мощности, подключенный к первой обмотке 1 управления. Выход блока 9 сравнения через второе двухпозиционное реле 13 и второй усилитель 14 мощности подключен к второй обмотке 2 управления. Между выходом датчика 15 положения и вторым входом блока 8 формирования включены последовательно соединенные вычитаю1ций блок 16, первый блок 17 перемножения сумматор 18, первый 19 и второй 20 интегрирующие усилители. Между другим входом сумматора 18 и входом интегрирующего усилителя 19 включен второй блок 21 леремножения. Электропривод содержит также задатчик 22 частоты колебаний якоря 6, через квадратор 23 подсоединенный к другому входу блока 17 перемножения При этом выход первого интегратора 19 подключен также к третьему входу блока в формирования, выход вдорого интегратора 20 подсоединен к другому входу вычитающего блока 16, выход суьв4атора 18 подключен к другому входу блоке 9 сраяисиия, а выход эадатчика 22 - к другому входу второго блока 21 перемножения. Блоки 16-23 образуют дифференцирующий фильтр с изменяемой инерционностью. Епоки 7 и 22 могут быть выполнены в виде источников регулируемых напряжений, а блок 8 - в виде усилителя, постоянного тока с cyм мpyющими входами. Блоки 9-11, 13, 16-21 и 23 выполняются известным образом на Интегральных микросхемах. Усилители 12 и 1А мощности работают в ключевом режиме и могут быть выполнены на сиповых транзисторах или тиристорах. Датчик 15 положения может быть индуктивным, потенциометрическим, фотоэлектрическим, лазерным и т.д. Использование обмоток 3 и 4 подмагничивания не обязательно, но при прочих равных условиях позволяет в 5-10 раз повысить быстродействие электропривода, а следовательно, и расширить его рабочий диапазон. Электропривод работает следуилцим образом. Обмотки подмагничивания питаются неизменным по величине постоянным током. На выходе блока 8 также, Как и в известном электроприводе Щ , формируется требуемая производная выходной величины х в соответствии с заданным дифференциальным уравнением движения: X F(x% у, у .) у1 We,((Up) -,ф W x4V(Vp2 +)uXp+ 1) , р2 +(uB,p + ;.- о, 1, 2, где F - непрерывная однозначная функция; программа изменения выходной величины на выходе блока 7; У,У,У - измеренные,, значения выходной величины X и ее производных X, X на выходах блоков 20, 19 и 18 соответственно; V ( передаточная функция дифференцирующего фильтра совокупности блоков 16-23 по выходам у, у, у.
51
flj - малый параметр, определяющий инерхщонность дифференцирующего фильтра}
Ь 1,2 - 1,4.
Функция F (х°, у, у) отражает заданные динамические свойства электропривода. Она может быть принята линейной в виде
-1 .
Flx°.4,4 T;;V-4V2d T-.ij ,,(2) где Т , di - желаемые параметры переходного процесса отработки (постоянная времени и коэффициент демпфирования соответственно) . В предлагаемом электроприводе можно структурным преобразованием .вьщелить контур быстрьтх движений - контур управления, в котором локализуется.проявление возмущений. При этом высокочастотные автоколе.бания, возникающие в контуре быстрых движений, являются рабочими колебаниями якоря 6 с регулируемой частотой и амплитудой. Регулирование частоты этих колебаний в требуемом диапазоне обеспечивается использованием дифференцирукнцего фильтра с изменяемой инерционностью, содержащего блоки 16-23. Пусть в начальный момент якорь 6 находится в крайнем правом положении и х(о) 0. При этом усилители 12 и 14 отключены от обмоток 1 и 2. Сигнал X на выходе датчика 15 -положения равен нулю. Нулю равны и сигналы на выходах интеграторов 19, 20 и сумматора 18. На выходе блока 22 сигнал равен щ . При появлении на выходах блока 7 задающего сигнала х° на выходе блока 8 формируется начальный сигнал Р(х ). Этот сигнал проходит через блоки 9-11 и 13 и приводит к перебросу реле 11 и 13 в исходные начальные состояния (например, Uj,, О, U( 0). После подключения усилителей 12 и 14 к обмоткам 1 и 2 управления по обмотке 1 протекает ток 1( и возникает тяговое усилие , воздействующее на ферромагнитнь якорь 6 влево к положению магнитного равновесия в поле включен ной обмотки 1. Так, как и в известном электроприводе, при протекании
1362956 .
л тока 1, в обмотке 1 ток в обмотке 2 не протекает. Воздействие тягового усилия F, на якорь 6 приводит к его перемещению и, следовательно, изменению выходного, сигнала х датчика 15. В результате изменяются сигналы и на выходах блоков 16-23. При фиксированном значении сигнала (Uна выходе блока 22 сигнал U,g О у на выходе сумматора 18 изменяется в соответствии с уравнением 8-4Al8 JejiU,,-UaoVU27 iqlU,5-U«.Ui6 или учитьгоая, что - коэффициент передачи блока 18 по первому входу; К,„ - коэффициент передачи блока 18 по второму входу ,U,,x-U,,ij-,U2,|b-;Ujo.y, получаем у.р-Чх - у) - |u-4, у. . Это уравнение дифференцирующего фильтра с передаточной функцией вида () ( H-|Jib,p+ 1)-, Toe сигналы U,(j у и U,g у на выходах, блоков 19 и 18 являются оЦен-ками производных х и х. В следующий момент резкое возрастание ускорения X и его измеренного значения у на выходе блока 18 приводит к изменению знака рассогласования на выходе блока 9 сравнения. В результате реле 11 и 13 переключаются в новые устойчивые состояния, реакциями на которые являются спад тока Jf в обмотке 1 и нарастание тока I 2 в обмотке 2. Электропривод входит в скользящий режим и в контуре управления устанавливаются высокочастотные автоколебания с частотой (О |U о Амплитуда колебаний якоря может регулироваться соответствующим изменением уровней ограничений + U у на выходные напряжения усилителей 12 и 14. Таким образом, частота автоколебаний (О в контуре управления и на
7
выходе электропривода определяется значением малого параметра Ц - инерционностью реального дифференцирования. Введение дифференцирующего фильтра с изменяемой инерционностью в электропривод обеспечивает возможность реализации скользящего режима (режима высокочастотных автоколебаний) с регулируемыми частотой и амплитудой колебаний. Поскольку величина Ш должна быть не менее чем в 10 раз меньше заданной инерционности электропривода Tji,, то и минимальная частота автоколебаний Также в 10 раз должна превышать максимально возможную частоту известного устройства. Это и приводит к увеличению диапазона рабочих частот предлагаемого электропривода, а следовательно, и к расширению его области применения, например, в технике вибрационных испытаний. Предлагаемый
362958
электропривод может работать как вибропривод (фиг. 2) или как следящий электропривод с наложением вибрационной составляющей (фиг. 3). Во
5 втором случае его примене1шя одновременно с воспроизведением высокочастотных автоколебаний с заданными параметрами CJ и Ау обеспечивается отслеживание с заданной динамикой
to требуемого закона изменения медленной составляющей x(t).
Использование изобретения позволяет увеличить частоту колебаний якоря до 500 Гц, а с использованием
15 обмоток подмагничивания до 3-5 кГц.
Дополнительный эффект от использования изобретения состоит в упрощении электромеханической системы 20 увеличения ее срока службы ввиду
исключения упругих механических элементов - пружин.
-li
кМ
VUMI/WVVIAAA
V
2/1х
л-в
I
Фаг. 2


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Электропривод постоянного тока | 1977 |
|
SU788321A1 |
| Устройство для управления электроприводом постоянного тока | 1977 |
|
SU748753A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| Устройство для автоматической настройки компенсации | 1987 |
|
SU1520626A1 |
| Устройство для управления вибровозбудителем | 1981 |
|
SU1012064A1 |
| Устройство для измерения скорости асинхронного двигателя | 1979 |
|
SU873127A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |

1. ЭЛЕКТРОПРИВОД ВОЗВРАТНОПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ, содержащий электромагнитный двигатель с двумя обмотками управления и ферромагнитным якорем, датчик положения якоря, последовательно ctэeдинeнныe программный блок, блок формирования требуемой производной сигнала, блок сравнения, к выходу которого подключены два реле, причем первое реле, соединенное выходом с одной обмоткой, подключено через инвертор, а второе, соединенное выходом с второй обмоткой, - непосредственно, отличающийся тем, что, с целью расширения области применения за счет увеличения диапазона рабочих частот, в него введен дифференцирующий фильтр с изменяемой инерционностью, имеюи Т1й выходы сигнала и его производных, причем выход второй производной подключен к второму выходу блока сравнения, другие выходы фильтра подключены к входам блока формирования требуемой производной, а вход дифференцирующего фильтра подключен к датчику положения якоря. 2. Электропривод по п. 1, отличающийся тем, что дифференцирующий фильтр с изменяемой инерционностью состоит из задатчика частоты, квадратора, первого блока (П перемножения и последовательно соединенных вычитающего блока, второго С блока перемножения, сумматора, двух интеграторов, причем выход первого интегратора подключен также к входу вычитающего блока, к другому входу которого подключен датчик положения якоря, а задатчик частоты подключен к входу первого блока перемножения и соединен с входом второго блока перемножения через квадратор.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Испытательная техника | |||
| Справочник под ред | |||
| Ключева В.В | |||
| М., Машиностроение, 1982, с.184 195 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 3426659/24-07, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
