Изобретение относится к сельскомухозяйству, . в частности к кормлению животных.
Известно устройство управления дозатором мобильногокормораздатчика, включающее задатчики доз корма датчики, у становленныё у каждой кормушки и приемный блок, установленный на мобильном кормораздатчике С13.
Недостатком этого устройства является низкая точность дозирования.
Наиболее близким по технической сущности к предлагаемому является устройство включающее установдайные у кормушек датчики, взаимодействующие с приемным блоком,установленным на мобильном кормораздатчике и под.ключенны; к исполнительному механизму ааслонки выгрузного устройства,, и задатчики доз корма t21.
Недостатком данного устройства является относительно низкая точность дозирйвания.
Цельизобретения - повышение точности дозирования.
Поставленная цель достигается тем, что устройство снабжено датчиком скорости вращения ведомых колес мобильного кормораздатчика, шаговым переключателем, интегрирующим блоsKOM, блоком сравнения и датчиком положения заслонки выгрузного устройства, причем входы блока сравнения подключены к датчику положения за:слонки выгрузного устройства, через интегрирующий блок - к датчику скорости вращения ведомых колес мобильного кормораздатчика/ а через контакты шагового переключателя 10к задатчикам доз корма, выходы лока сравнения.подключены к исполнительному механизму заслонки выгрузного устройства, при этом шаговый переключатель к клеммам источника
15 питания -подключен-через контакт датчика скорости вращения ведомых колес мобильного кормораздатчика. .
Кроме того,, исполнительный механизм заслонки выгрузного устройства
20 выполнен реверсивным. .
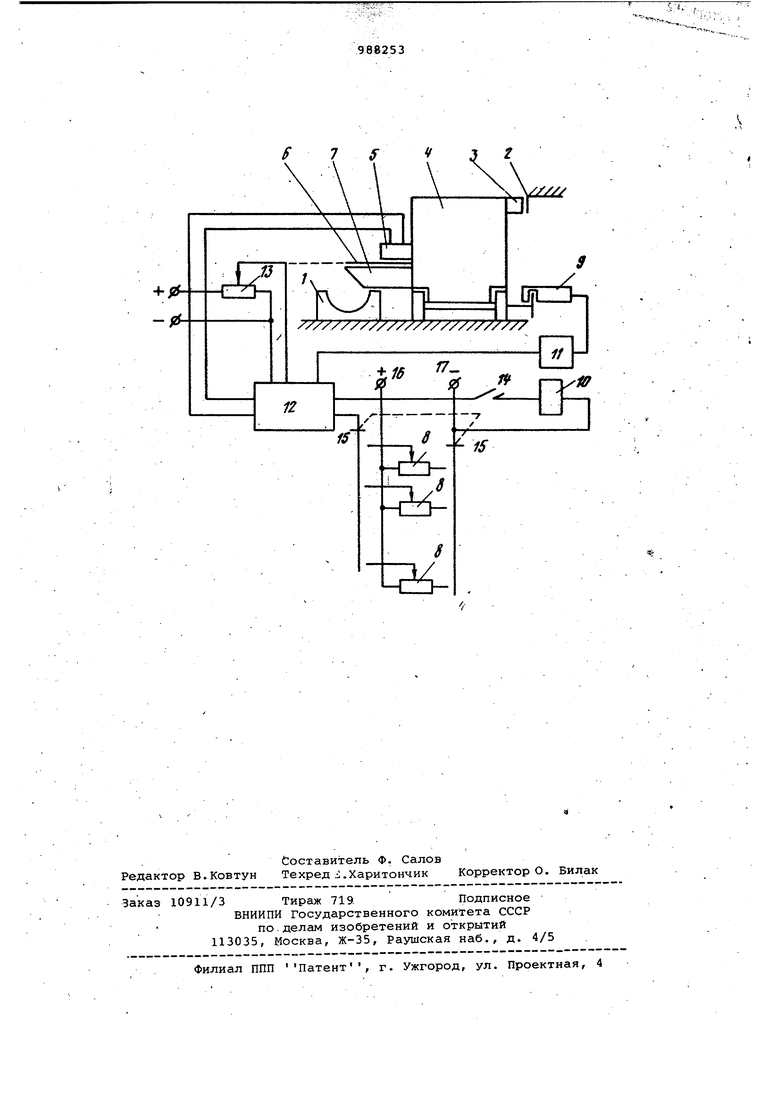
На sepTeKe;представлена функциональная схема устройства.
. Устройство включает установленные у кормушек 1 датчики 2 взаимодей25ствующие с приемным блоком 3, установленным на мобильном кормораздатчике 4, исполнительный механизм 5 заслонки б выгрузного устройства 7, задатчики,8.доз корма, датчик 9 ско30рости вращения колес мобильного к мораэдатчика, шаговый переключатель 10, интегрир тощий блок 11, блок сравнения 12, датчик 13 положения заслонки выгрузного устройства 7, контакты 14 - датчика 9 скорости вращения ведомых колес мобильного кормораздатчика, 15 - шагового переключателя, 16 и 17 - клеммы источ ника питания. Входы блока сравнения 12 подключены к датчику 13 положения заслонки выгрузного устройства 7, через 1интегрирующий блок 11 - к датчику 9 (скоройти вращения колес мобильного кормораздатчика 4, а через контакты 15 шагового переключателя 10 - к за датчику 8 доз корма. Выходы блока Ьравнения 12 подключены к исполнительному механизму 5 заслонки б выг рузного устройства 7, шаговый, перек лючатель 10 - к клеммам 16 и 17 источника питания через контакт 14 да чика 9 скорости вращения ведомых колес мобильного кормораздатчика 4, при этом.исполнительный механизм 5 , заслонки б выгрузного устройства 7 выполнен реверсивным. Устройство работает следующим образом. Требуемая доза по каждой кормушке 1 устанавливается оператором пос редством задатчиком 8 доз корма пер включением кормораздатчика 4. После включения кормораздатчика 4, которы перемещается по пути я при подходе к кормушкам, первый из датчиков 2 воздействует на приемный -блок 3, в результате чего включается его контакт 14, при этом включается шаговый переключатель 10, который переводит свои контакты 15 из нулевого в первое положение, чем обеспечивается подключение первого задатчика 8 доз корма к блоку сравнения 12. В блоке сравнения 12 производится сравнение сигналов с датчика 8 доз корма и датчика 13 положения заслон ки б выгрузного устройства 7, при этом исполнительный механизм 5 пере мещает заслонку б до заданного значения, посредством датчика 8 доз корма. После указанной операции кор поступает в кормушку 1, и одновременно на вход блока сравнения 12 через интегрирующий блок 11 подаетс сигнал с датчика 9 скорости вращени ёедся 1ых колес мобильного кормораздатчика 4.° Если скорость движения мобильног кормораздатчика 4 ниже номинальной, то с выхода интегрирующего блока 11 на вход блока сравнения 12 подается сигнал, вызывающий перемещение заслонки 6 выгрузного устройства 7 на уменьшение отверстия выгрузки корм Если скорость движения мобильного кормораздатчика 4 выше номинальной, то происходит увеличение отверстия выгрузки корма. При номинальной скорости мобильного кормораздатчика 4 корректирующий сигнал не вырабатывается. При пробуксовке мобильного кормораздатчика 4 вырабатывается сигнал, полностью закрывающий отверстие выгрузки корма. Таким образом, предлагаемое устройство обеспечивает повышение точности дозирования путем регулирования кормораздачи с учетом изменения скорости движения мобильного кормораздатчика. Формула изобретения 1.Устройство управления дозатором мобильного кормораздатчика,включающее установленные у кормушек датчики, взаимодействующие, с приемным блоком, установленным на мобильном кормораздатчике и. подключенным к исполнительному механизму заслонки выгрузного устройства, и задатчики доз корма, отличающееся тем, что, с целью повышения точности дозирования путем регулирования кормораздачи с учетом изменения скорости движения мобильного кормораздатчика, оно снабжено датчиком скорости вращения ведомых колес мобильного кормораздатчика, шаговым перек.яючателем, интегрирующим блоком, блоком сравнения и датчиком положения зас.донки выгрузного устройства,причем входы блока сравнения подключены к датчику положения заслонки выгрузного устройства, через интегрирующий блок - к датчику скорости вращения ведомых колес мобильного кормораздатчика, а через контакты шагового переключателя - к задатчикам доз корма, выходы блока сравнения подк.пючены к исполнительному механизму заслонки выгрузного устройства, при этом шаговый переключатель к клеммам источника питания подк.лючен через контакт датчика скорости вращения ведомых колес мобильного кормораздатчика. 2.Устройство по п. 1, отличающееся тем, что исполнительный механизм заслонки выгрузного устройства выполнен реверсивным. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 432889, кл. А 01 К 5/00, 1974. 2.Авторское свидетельство СССР 609521, кл. А 01 К 5/00, 1978 (прототип).
f 7 f Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления кормораздачей | 1976 |
|
SU662049A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1984 |
|
SU1168159A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1978 |
|
SU727184A1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Кормораздатчик-дозатор | 1988 |
|
SU1576080A1 |
| Кормораздатчик | 1982 |
|
SU1093306A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1982 |
|
SU1080801A1 |
| Животноводческая ферма | 1986 |
|
SU1311675A1 |
| Устройство для управления дозированной раздачей кормов | 1987 |
|
SU1428324A1 |
| Способ дозированного кормления птицы и устройство для его осуществления | 1988 |
|
SU1588343A1 |