(54) НИТЕРАСКЛАДЫВАЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования паковки синтетических нитей | 1989 |
|
SU1806079A3 |
| Устройство для раскладки нитевидного материала на катушке | 1985 |
|
SU1331781A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МЕХАНИЗМОМ РАСКЛАДКИ НИТИ ПРИ НАМОТКЕ НА БОБИНУ | 1992 |
|
RU2030351C1 |
| Способ изготовления многослойной нитчатой насадки и устройство для его осуществления | 1986 |
|
SU1393454A1 |
| Устройство для намотки нитевидных материалов | 1981 |
|
SU977344A1 |
| Устройство для управления механизмом раскладки нити при намотке на бобину | 1985 |
|
SU1406108A1 |
| Устройство для раскладки нитевидного материала на паковке | 1983 |
|
SU1121221A1 |
| Укладчик проволоки на катушку | 1986 |
|
SU1323157A1 |
| Автомат для приварки к торцам труб элементов соединительной арматуры | 1974 |
|
SU640830A1 |
| Линейный электрический привод | 1978 |
|
SU744863A1 |
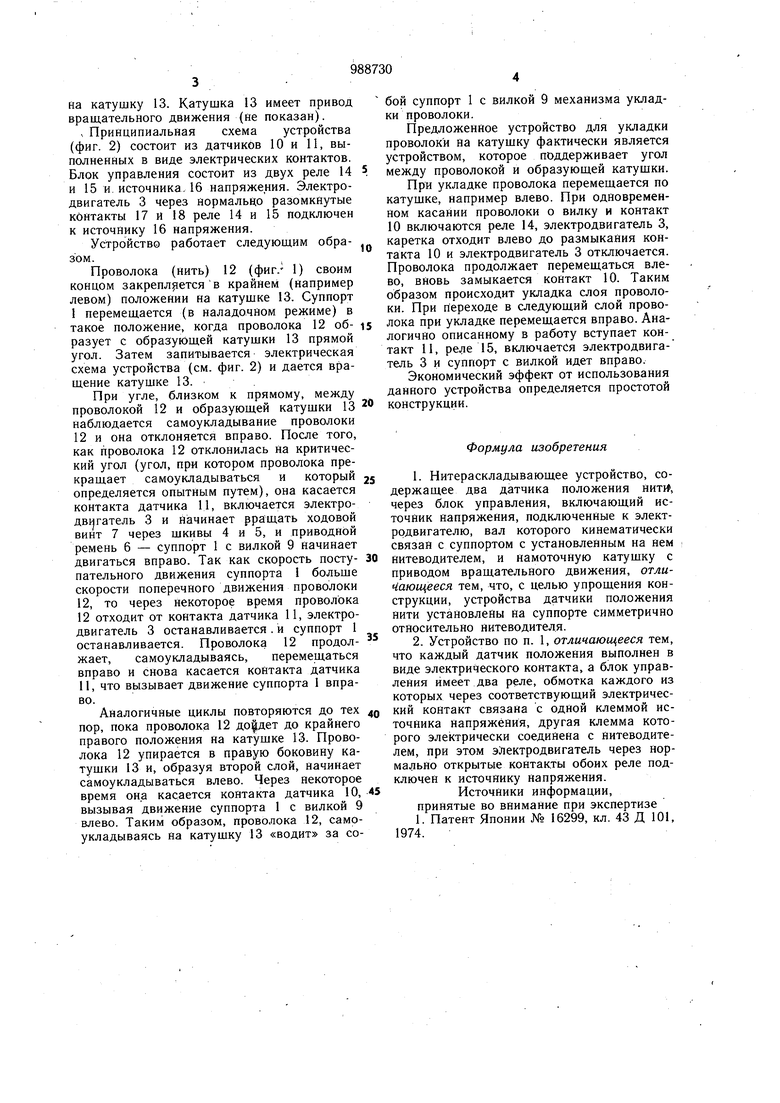
Изобретение относится к намоточным устройствам а именно к устройствам для многослойной намотки токопроводящей нити, например проволоки на катушки. Известно яитераскладывающее устройство, содержащее два датчика положения нити, через блок управления, включающий источник напряжения, подключенные к электродвигателю, вал которого кинематически связан с суппортом с установленным на нем нитеводителем, и намоточную катушку с приводом вращательного движения 1. Недостаток известного устройства состоит в сложности конструкции, обусловленной сложностью выполнения блока управления. Цель изобретения - упрощение конструкции устройства. Поставленная цель достигается тем, что в устройстве, содержащем два датчика положения нити, через блок управления, включающий источник напряжения, подключенные к электродвигателю, вал которого кинематически связан с суппортом с установленным на нем нитеводителем, и намоточную катушку с приводом вращательного движения, датчики положения нити установлены на суппорте симметрично относительно нитеводителя. Кроме того, каждый датчик положения выполнен в виде электрического контакта, а блок управления имеет два реле, обмотка каждого из которых через соответствующий электрический контакт связана с одной клеммой источника напряжения, другая клемма которого электрически соединена с нитеводителем, при этом электродвигатель через нормально открытые контакты обоих реле подключен к источнику напряжения. На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 - принципиальная электрическая схема устройства для раскладки токопроводящей нити (проволоки) на катушку. Нитераскладывающее устройство (фиг. 1) содержит суппорт 1, перемещающийся по направляющим 2 электровинтовым приводом, состоящим из электродвигателя 3, пары шкивов 4 и 5, приводного ремня 6, ходового винта 7 и гайки 8, закрепленной на суппорте 1, на котором имеется нитеводитель (вилка) 9 и датчики 10 и 11 положения нити, установленные так, что между ними проходит нить 12, идущая через вилку 9
на катушку 13. Катушка 13 имеет привод враш,ательного движения (не показан).
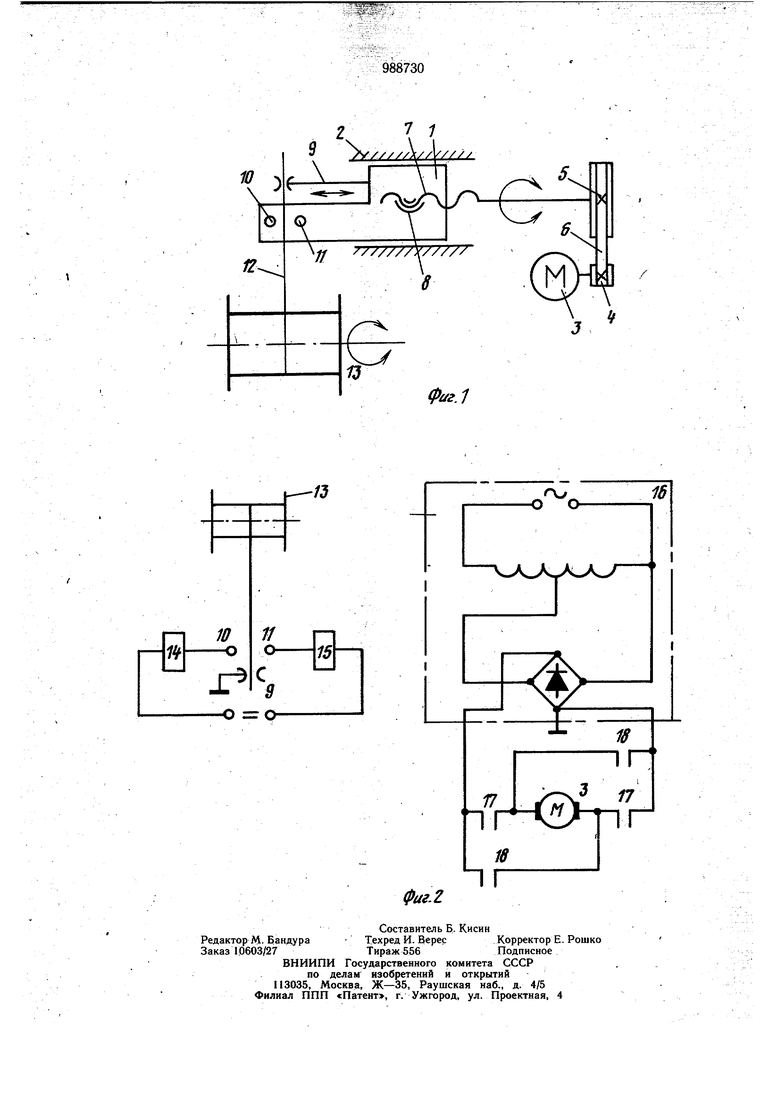
, Принципиальная схема устройства (фиг. 2) состоит из датчиков 10 и 11, выполненных в виде электрических контактов. Блок управления состоит из двух реле 14 и 15 и. источника. 16 напряжения. Электродвигатель 3 через нормально разомкнутые контакты 17 и 18 реле 14 и 15 подключен к источнику 16 напряжения.
Устройство работает следуюшим образом.
Проволока (нить) 12 (фиг. 1) своим концом закрепляетсяв крайнем (например левом) положении на катушке 13. Суппорт 1 перемеш,ается (в наладочном режиме) в такое положение, когда проволока 12 образует с образующей катушки 13 прямой угол. Затем запитывается электрическая схема устройства (см. фиг. 2) и дается враш,ение катушке 13.
При угле, близком к прямому, между проволокой 12 и образующей катушки 13 наблюдается самоукладывание проволоки 12 и она отклоняется вправо. После того, как проволока 12 отклонилась на критический угол (угол, при котором проволока прекращает самоукладываться и который определяется опытным путем), она касается контакта датчика 11, включается электродвигатель 3 и Начинает рращать ходовой винт 7 через шкивы 4 и 5, и приводной ремень 6 - суппорт 1 с вилкой 9 начинает двигаться вправо. Так как скорость поступательного движения суппорта 1 больще скорости поперечного движения проволоки 12, то через некоторое время проволока 12 отходит от контакта датчика 11, электродвигатель 3 останавливается .и суппорт 1 останавливается. Проволока 12 продолжает, самоукладываясь, перемещаться вправо и снова касается контакта датчика 11, что вызывает движение суппорта 1 вправо.
Аналогичные циклы повторяются до тех пор, пока проволока 12 до|дет до крайнего правого положения на катушке 13. Проволока 12 упирается в правую боковину катушки 13 и, образуя второй слой, начинает самоукладываться влево. Через некоторое время она касается контакта датчика 10, вызывая движение суппорта 1 с вилкой 9 влево. Таким образом, проволока 12, самоукладываясь на катушку 13 «водит за собой суппорт 1 с вилкой 9 механизма укладки проволоки.
Предложенное устройство для укладки проволоки На катушку фактически является устройством, которое поддерживает угол между проволокой и образующей катушки.
При укладке проволока перемещается по катущке, например влево. При одновременном касании проволоки о вилку и контакт 10 включаются реле 14, электродвигатель 3, каретка отходит влево до размыкания контакта 10 и электродвигатель 3 отключается. Проволока продолжает перемещаться влево, вновь замыкается контакт 10. Таким образом происходит укладка слоя проволоки. При переходе в следующий слой проволока при укладке перемещается вправо. Аналогично описанному в работу вступает контакт 11, реле 15, включается электродвигатель 3 и суппорт с вилкой идет вправо.
Экономический эффект от использования данного устройства определяется простотой конструкции.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 16299, кл. 43 Д 101, 1974.
