. . 1 . . Изобретение относится к гцдроавтоматике и может быть использовано в электрогидравлических приводах различных машин.
Известен электрогидравлический усилитель, содерж ий последовательно соединенные сравнивакщее устройство, электронный усилитель, электромехани-; ческий преобразователь и гидроусилитель, распределительный золотник ко- Q торого Кинематически связан с поворотным якорем электромагнитного датчика положения, связанного с отрицательным входом сравнивающего устройства и включакхцёго постоянный маг- 1$ нит и неподвижную магнитную систему с магниторезисторами, установленными на магнитопроводах с зазором относительно якоря и включенными по дифференциальной схеме 11.20
Недостатком известного усилителя является низкое быстродействие из-за размещения постоянного магнита на поворотном якоре.
, Цель изобретения - повышение быстродействия.
Указанная цель достигается тем, что в электрогидравлическом усилителе неподвижная магнитная система выполнена Ш-образной, в центре ее расположен постоянный магнит, а по краям - установленные с возможностью перемещения вдоль оси постоянного магнита магнитопроводы.
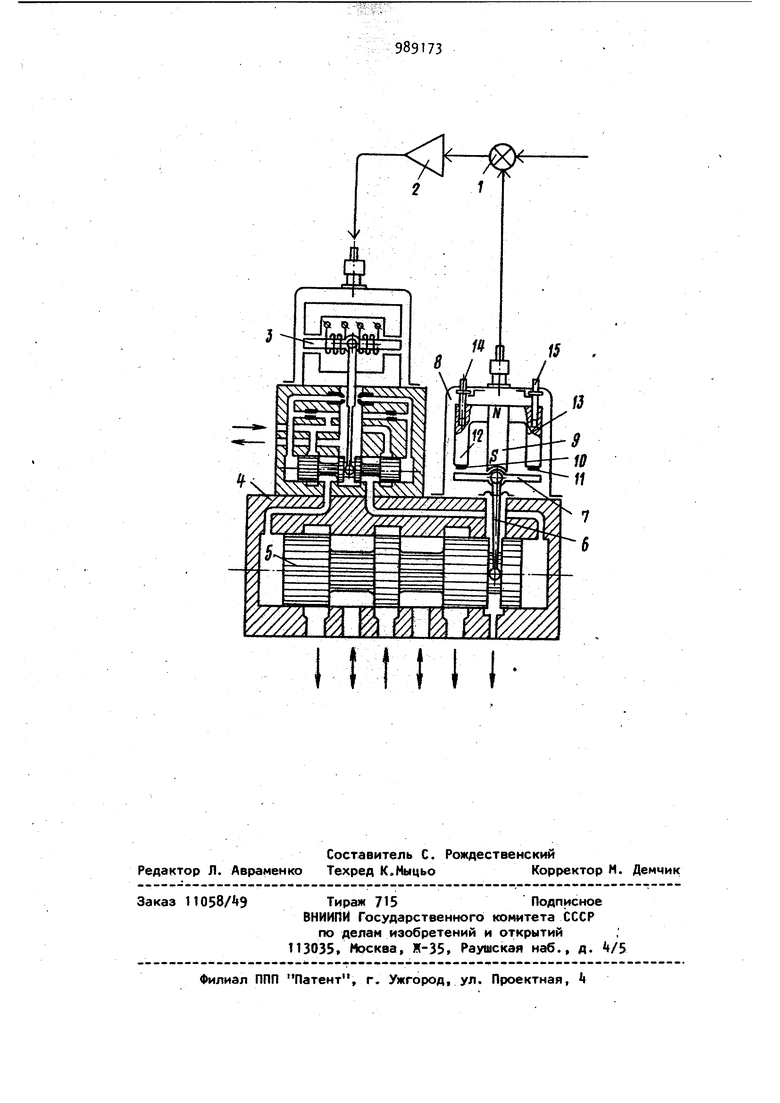
На чертеже изображена схема электрогидравлического усилителя.
Усилитель содержит последовательно соединенные сравнивающее устройство 1, электронный усилитель 2, электромеханический преобразователь 3 и, например, трехкаскадный гидроусилитель t, распределительный золотник 5 которого кинематически, например рычажной передачей 6, связан с поворотным якорем 7 электромагнитного датчика 8 положения, связанного с отрицательным входом сравнивающего устройства 1 , и включающего неподвижную Ш-образную магнитную систему, состоящую из установленного в центре ее постоянного магнита 9 и магниторезистороа 10 и 11, установленных на Г-образных магнитопроводах 12 и 13 соответственно с зазором относительно яко ря 7 и включенных по дифференциальной схеме. Магнитопроводы,12 и 13 установлены по краям магнитной системы с возможностью перемещения вдоль оси постоянного магнита 9 с помощью винтов 14 и 15Электрогидравлический усилитель работает следующим образом. Входной электрический сигнал подается на сравнивающее устройство 1, эяектрическим где сравнивается с с датчика 8 полосигналом, снимаемым жения. Выработанный устройством 1 сиг нал небаланса усиливается электронным усилителем 2 и подается на электромеханический преобразователь 3, являющийся управляющим устройством гидроусилителя 4. Таким образом, величина и знак сигнала небаланса определяют положение золотника 5 и, следовательно величину и направление движе ния потока масла на выходе золотника 5- Положение золотника 5 определяет положение кинематически связанного с ним при помощи рычажной передачи 6 якоря 7 т.е. величин правого и левого рабочих магнитных зазоров между якорем 7 и магнитопроводами 12 и 13, а, следовательно величин магнитных потоков в этих зазорах и величин омических сопротивлений установленных в этих зазорах магниторезисторов 10 и. 11. В результате сигнал, снимаемый с датчика 8, изменяется пропорционально перемещению золотника S- Когда величина этого сигнала становится равной величине входного сигнала, сигнал небаланса становится равным нулю, и распределительный золотник 5 останавливается. При этом величина перемещения распределительного золотника 5 пропорциональна величине изменения входного электрического си(- нала. Настройка (балансировка и регулировка коэффициента преобразования датчика 8 положения и, соответственно, электрогидравлического усили934 теля в целом) осуществляется перемещением, магнитопроводов 12 и 13 вдоль постоянного магнита 9 т.е. изменением величин магнитных зазоров датчика 8 положения. Выполнение постоянного магнита неподвижным позволяет уменьшить массу подвижных элементов (якоря датчика положения) электрогидравлического усилителя, т.е. увеличить его быстродействие. При этом возможность существенно увеличить массу неподвижного постоянного магнита без ухудшения основных характеристик электрогидравлического усилителя позволяет изготовлять его из недефицитных материалов с малой удельной магнитной энергией. Использование предлагаемого изобретения в электрогидравлических приводах различных машин позволяет повысить их быстродействие и эффективность их использования. Формула изобретения Электрогидравлический усилитель, содержащий последовательно соединенные сравнивающее устройство, электронный усилитель, электромеханический преобразователь и гидроусилитель, распределительный золотник которого кинематически связан с поворотным якорем электромагнитного датчика положения, связанного с отрицательным входом сравнивающего устройства и включающего постоянный магнит и неподвижную магнитную систему с магни торезисторами, установленными на магнитопроводах с зазором относительно якоря и включенными по дифференциальнои схеме, отличающийся тем, что, с целью повышения быстродействия, неподвижная магнитная система выполнена Ш-образной, в центре ее расположен постоянный магнит, а по краям - установленные с возможностью перемещения вдоль оси постоянного магнита, магнитопроводы. Источники информации, принятые во внимание лри экспертизе 1. Авторское -свидетельство по заявке № 29 3161/25-06, кл. F 15 В 9/03, 1980.
I tit I I
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель | 1980 |
|
SU928088A1 |
| Электрогидравлический усилитель | 1980 |
|
SU950963A1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2183293C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| Электрогидравлический усилитель мощности | 1980 |
|
SU947482A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОКЛАПАН | 1992 |
|
RU2030658C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Однокаскадный гидроусилитель | 1981 |
|
SU1021826A1 |