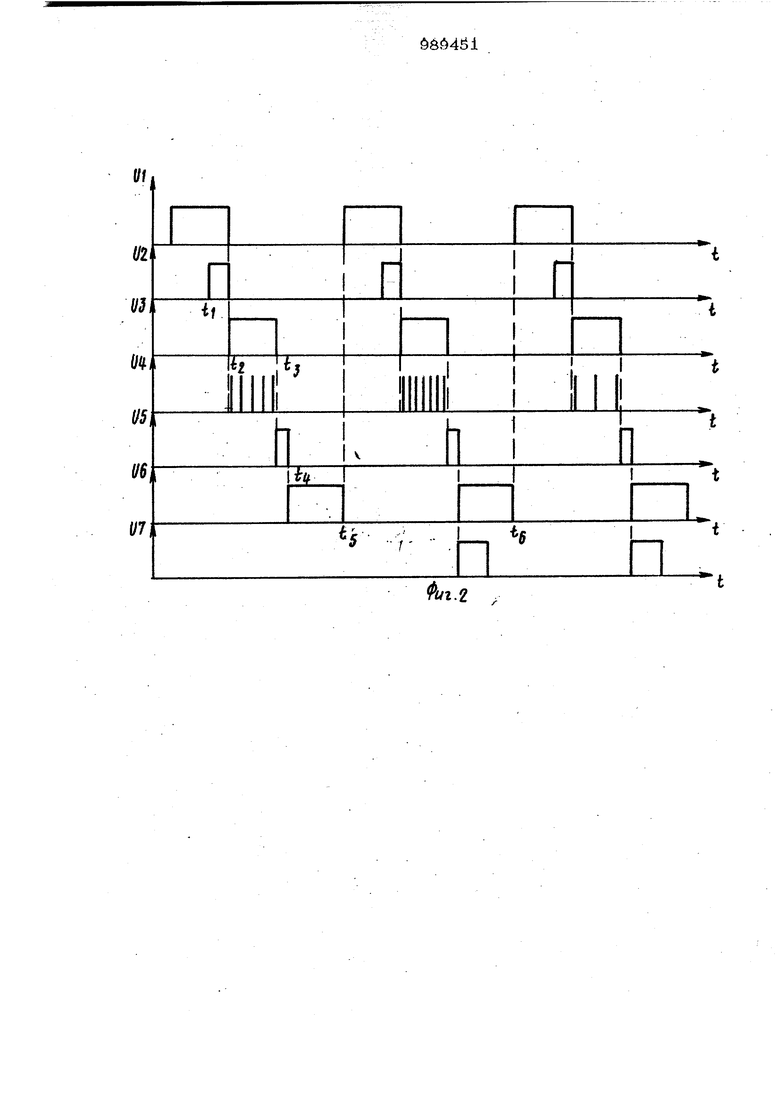
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ КАЧЕСТВА ЭЛЕКТРОПРОВОДЯЩИХ ИЗДЕЛИЙ Изобретение относится к электромагнитному контролю и может быть использовано для контроля качества изделий, например металлических трубок или стерж ней. Известно устройство для автсматичес- кого контроля качества электропроводящих изделий, содержащее генератор высокой частоты, электромагнитные преобразователи (ЭП) начала изделия, ЭП конца изделия, расположенный на расстояНИИ, равном минимально допустимой длине изделия от ЭП начала изделия, два блока обработки сигналов, входом подключенные к выходам соответствующих ЭП, одновибратор, схему совпадения, механизмы сортировки и перемещения изделий через электромагнитные преобразователи С1 3 Недостатком известного устройства является низкая точность контроля качества изделий. Наиболее близким по технической сущности является устройство для автоматического контроля качества электропроводяпщх изделий, содержащее электромагнит ные преобразователя соответственно на чала и конца изделий, блок обработки сигналов, вход которого соединен с эле тромагнитным преобразователем начала изделий, и механизм сортировки С 2 . Так как в известном устройстве электромагнитные преобразователи установлены на расстоянии, равном максимальной длине изделия, а выход преобразователя конца изделия подключен к трем блокам обработки сигналов, то недостатком данного устройства является низкая точ кость контроля из-за сильной индуктивной связи между электромагнитными преобразователями, конструктивная сложность перехода к другому -птс измеру изделий и недостаточная технологичность измерений. Цель изобретения - повыщенве надехоности контроля изделий с малым полем допусков. , Поставленная цель достигается тем, что в устройстве для автома1тического контроля качества электропроводящих S8 изделий, содержащем электромагнитные преобразователи соответственно начала и конца изделий, блок обработки сигналов вход которого соединен с электромагнит преобразователем начала изделий, и механизм сортировки, преобразователи начала и конца изделий установлены на расстоянии, равном средней длине изделия, а устройство снабжено последователь но соединенными унраьляемым автогенератором, в колебательный контур которого включен электромагнитный преобразователь конца изделия, счетчиком и блоко сравнения, выход которого соединен с механизмом сортировки, а также формирователем поля допусков, выход которого подключен к второму входу блока сравнения, и блоком управления, вход ко1Х)рого соединен с выходом блока обработки сигналов, а выходы подключены к входам управления блока обработки сигналов, управляемого автогенератора, счет чика и блока сравнения. На фиг. 1 представлена структурная схема устройства для автоматического контроля качества электропроводящих изделий; на фиг. 2 - временные диаграммы, поясняющие работу устройства; на фиг. 3 - зависимость частоты управляемого автогенератора от положения конца изделия; на фиг. 4 - функциональная схема блока обработки сигналов. Устройство содержит соединенные последовательно электромагнитный преобразователь 1 конца изделия, управляемый автогенератор 2, счетчик 3, блок 4 срав нения, и механизм 5 сортировки, а тшсже, соединенные последовательно электр магнитный преобразователь 6 начала изделия, блок 7 обработки сигнала и блок 8 управления. Ко второму входу блока 4 сравнения подключен формирователь 9 поля допусков. Выходы блока 8 управления Подключены к входам управления блока 8 обработки сигнала, управляемого автогенератора 2 счетчика 3 и блока 4 сравнения. На фиг. 1 показано также контролируемое изделие 10, перемещающееся по трубопроводу 11. Временные диаграммы, представленные на фиг. 2, соответствуют следующие сигешлам: U-j - форма сштшла на первом выходе блока 8 управления} сигнала на выходе блока 7 обработки сигнала; фор«1а сигналов на втором вьосоде блока 8 управления; сигналы, возникающие заа выходе управпяемог автогенератора 2; ( сигналу на трет ем выходе блока 8 управления; Og - сиг 1 алы на четвертом выходе блока 8 управения; UT „ сигналы, поступающие на ход механизма 5 сортировки. Блок 7 обработки сигналов (фиг. 4) ыполнен в виде последовательно соедиенных управляющего автогенератора 12, колебательный контур которого вклюается электромагнитный преобразователь конца изделия, счетчика 13, дещифраора 14, R5 -триггера 15 и формирователя 16. Первый выход формирователя 16 соединен с управляющим входом управляющего автогенератора 12, второй выход - с правляющим входом дещифратора 14, третий выход с шиной сброса счетчик 13. Вход формирователя 16 соединен с 1шверсг ым выходом Я5- григгера 15, прямой выход которого соединен с входом блока 8 управления, а его R -вход - с первым выходом блока 8 управления. Устройство работает следующим образом. Изделие 10 перемещается под дейст вием собственного веса через электромагнитные преобразователи 1 и 6 начала и конца изделия. При этом частота управляемого автогенератора 2 изменяет ся (фиг. 3). Определе1дае частоты управляемого автогенератора 2 происходит, начиная с момента появления сигнала iU . При помощи блока 8 управления сигнал изФормируется высокостабильной длительности. Формирование сигнала начинается в момент времени Ъг соответствующий моменту вхождения начала изделия 10 в электромагнитный преобразователь 6 начала изделия. Фиксация момента вхождения начала изделия 1О осуществляется с помощью блока 7 обработки сигнала. При наличии сигнала с первого выхода блока 8 управления, формирователь 16 формирует за каждый никл работы три последовательных сигнала постоянной Длительности. Первый сигнал формирователя 16 включает за определенный постояннь1й интервал времени управляемый автогенератор 12 и за этот интервал времени счетчик 13 суммирует число пршпедших импульсов. Вторым сигналом формирователя 16 дается разреше- . ние на включение дешифратора 14. Третьим сигналом формирователя 16 счетчик 13 сбрасывается в исходное состояние, и весь цикл работы формирователя 16 повторяется. Частота управляемого автогенератора 12 зависит от положения изделия 10 относительно электромагнитного преобразователя 6 начала изделия. Момент -t (фиг. 2) вхождения начала изделия 10 в электромагнитный преобразователь 6 начала изделия фиксируется дешифратором 14, сигнал с выхода которогю поступает на S -вход RS-триггера .15. С прямого выхода R -триггера 15 сигнал 1/2 поступает яа вход блока 8 .управления. Одновременно сигнал с шгоерсно го выхода R5-триггера 15 блокирует : формирователь 16. Управляемый автогенератор 12 также блокируется и тем самым устраняется влияние частоты управляемого автогенератора 12 на частоту управляемо го автогенератора 2,что повышает помехо защищенность устройства. При поступле. НИИ сигнала U выхода блока 7 обработ- ки сигнала,блок 8 управления формирует цикл последовательных сигналов U , U/ , и . В мрмент времени второго выхода блока 8 управления формируется сигнал длительность которого посто5шна. При поступлении этого сигнала на управляющий вход управляемого автоге нератора 2 (4ЯЯГ. 4) происходит его включение. В интервал времени t2-tзИмпyль- ;ы с выхода управляемого автогенератора 2 суммируются в счетчике 3. В момент .; времени -{(фиг. 2) с третьего выхода блока 8 управления поступает сигнал на управляющий вход блока 4 сравнения. К этому моменту времени на первый вход блока 4 сравнения с выхода счетчика 3 поступает сигнал в виде параллельного кода С . На второй вход блока 4 сравнё ния информация поступает в виде двух сигналов А и В , представленных в паралле- льном коде, поступающих от формировате ля 9 поля допусков. Формирователь 9 поля допусков выполнен, например, в виде двух переключателей на К положений каждый из двух кодеров, формирующих К двоичных п -разрядных чисел. Число К равно числу полей допусков устройства, а шсло п зависит от рабочей частоты управляемого автогенератора 2 и интервала времени Алгоритм работы блока 4 сравнения можно представить в виде: если - годное и зделие; если С А - изделие бошэше нормьч если - изделие меньше . На фиг. 3 показано, как меняется частота управляемого автогенератора 2 при перемещении конна изделия 10 через электромагнитный преобразователь 1 койда изделия. В зависимости от частоты управляемого автогенератора 3 меняется и число С . 51 Изменение полей допусков осуществляется оператором с помощью двух переключателей. В момент времени t (фиг. 2) о четвертого выхода блока 8 управления на шину сброса счетчика 3 поступает сигнал и .Происходит установка счетчика 3 в исходное состояние. Длитедь ностъ сигнала U, равная интервалу 5 ьтбрана таким образом, чтобы сигнал на первом выходе блока 8 управ- ления появился при надежном прохождо- нки конца изделия 10 через электромагнитный преобразователь 6 начала изде- пня во всем рабочем диапазоне скоростей гстройства. При появлешш сигнала U в иомент времени tc на R -входе, RS - . -„ . . грйггера 15 блока 7 обработки сигнала. весь цшш работы устройства повторяет ся. На фиг. 2 в интервал времени t представлены временные диаграммы при прохождении через устройство годного изделия 1О: в интервал времени t5t{, - изделия 1О, длина которого больше. нормы, а в интервал времени t 7 изделия 1О, длина которого мешэше нормы или с дефектом-на конце. Условно формирователь 9 поля допусков фо1 лиру«т КОДЫ в - 100, А - 1Ю, соотпветствук щие в десятичном исчислении четьфем и шести импульсам последовательного кода. При прохождении годного изделия Ю на выходе счетчика 3 формируется сигнал U4 в. виде параллельного кода С. -1О1, соответствующего пяти импульсам последовательного кода. При прохождении изделия Ю, длина которого больще нормы, с выхода счетчика 3 поступает сигнал U в параллельном коде, соответствующий семи импульсам последовательного кода. При этом с выхода блока 4 сравнения на механизм 5 сортировки поступает сигнал U-j больше нор.мы и изделие 1О отнесено к яэделиям, длина которых больше нормы. При прохождении изделия 1О, длина которого меньше нормы, с выхода счетчика 3 поступает сигнал U в параллельном коде, соответствующий импульсам последовательного кода. .При этом с вь хода блока 4 сравнения на механизм 5 сортировки поступает сигнал U-, меньше нормы и изделие Ю отнесено к ягзде- ЛИЯМ, длина которых меньше нормы или с дефектами на конце. Рабочая частота управляемого автогенератора 2 может быть выбрана порядка 50 МГц, а интер- вал времени -bij - 12 - 1 мкс. Выбор этих значений необходим для устранйшн влияния скорости перемещения изделия
К) на точность и надежность работы устройс.тва. Естественно, что увеличение скорости движения .контролируемых изделий должно сопровождаться увеличением рабочей частоты управляемого автогенера- 5 тора 2 и сокращением интервала времени . В каждом конкретном случаб они рассчитьтаются, исходя из технических условий.
Устройство обеспечивает возможность О контроля длины изделий с малым полем допуска, выявление дефектов на краях изделий, простоту регулировки поля допусков и уменьшение времени перестройки.
15
Ф О р мула, изобретения
Устройство для автоматического контроля качества электропроводящих изделий, 20 содержащее электромагнитные преобразователи соответственно начала и конца изделий, блок обработки сигналов, вход которого соединен с электромагнитным преобразователем начала изделий, и геха-25 низм сортировки, отличающееся
тем, что, с целью гювьпиения надежное та контроля изделий с малык1 полем допусков, преобразователи наюла и конца изделий установлены на расстоянии, равном средней длине изделия, а устройство снабжено последовательно соединенными управляемым автогенератором, в колебательный контур которого включен электромагнитный преобразователь конца изделий, .счетчиком и блоком сравнения, выход KOI торого соединен с механизмом сортировки, а также формирователем поля допусков, которого подключен к второму входу блока сравнения, и блоком управления, вход которого соединен с выходом блока обработки сигналов, а выходы подключены к входам управления блока обработки сигналов, управляемого автогенератора, счетчика и блока сравнения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР ,4 364832, кл. Q 01 В 7/06, 1971.
2.Авторское свидетельство СССР № 673836, кл. Q 01 В 7/О4, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической сортировки цилиндрических изделий | 1980 |
|
SU879438A1 |
| Устройство для автоматической разбраковки электропроводных изделий по длине | 1981 |
|
SU983443A1 |
| Устройство для контроля длины электропроводных изделий | 1981 |
|
SU989316A1 |
| Формирователь импульсов | 1981 |
|
SU1042170A1 |
| Дефектоскоп для контроля изделий в процессе их движения | 1983 |
|
SU1132215A1 |
| Вихретоковый дефектоскоп | 1986 |
|
SU1320731A1 |
| Электромагнитный дефектоскоп для контроля коротких изделий | 1981 |
|
SU1000893A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ АППАРАТУРЫ УПРАВЛЯЕМОЙ РАКЕТЫ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289781C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ТЕЛ В СЛАБОПРОВОДЯЩИХ СРЕДАХ | 2000 |
|
RU2193189C2 |
| Способ неразрушающего контроля параметров изделий | 1987 |
|
SU1467494A1 |

Фиг.
11
Й/г.2
