.датчиком усилия на клинья роторного стола.
При такой конструкции нет необходимости производить подъем свечи с последующей остановкой в нужном положении. Необходимая информация, соответствующая выбранной K-ft свече, извлекается и автоматически запоминается в процессе технологической операции спуска колонны бурильных труб без его прерывания.
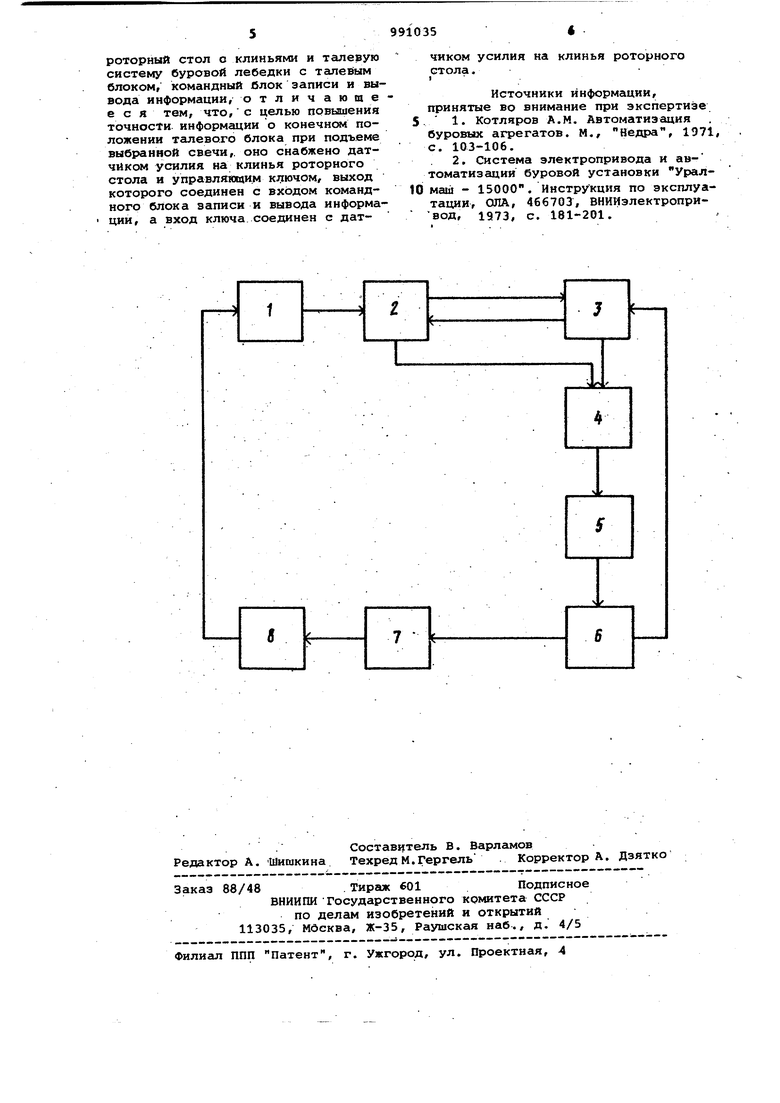
На чертеже представлена блок-схема устройства для автоматического управления приводом буровой лебедки, при СПО.
Устройство содержит командный бло 1 записи и вывода информации, программно-задающую систему 2, цифровую следящую систему 3, аналоговую систему 4 автоматизации, электропривод 5, механизм лебедки с талевой системой 6, датчик 7 усилия на клинья роторного стола и управляющий ключ 8
Перемещение талевого блока, являющегося составным элементом механизма лебедки с талевой системой 6, на заданное расстояние, соответствующее длине очерёдной K-ft свечи, осуществляет электропривод 5 по сигналу, приходящему от аналоговой системы 4 автоматизации, который формируется с учетом информации о длине колонны бурильных труб, поступающей на один из входов аналоговой системы 4 от программно-задающей системы 2, и сигнала, пропорционального разности между зсщанным и фактическим положением талевого блока, поступающего на второй вход аналоговой сисTeNBj 4 автоматизации от цифровой следящей системы 3. Сигнал о заданном конечном положении талевого блока на цифровую следящую систему 3 приходит из программно-задающей системы 2 по команде блока 1 записи и вывода информации. Текущая информация о фактическом положении талевого блока, входящего в состав меха- низма лебёдки с талевой системой б, поступает.от цифровой следящей системы 3 на один из входов программнозадающей системы и используется для запоминания нeoбxoди вJX констант,в том числе длины очередной К-й свечи
Устройство работает следугацим образом.
Информация о длине очередной К-й свечи вводится в память программнозадающей системы 2 автоматически в процессе выполнения технологической операции спусйа инструмента в скважину. .В начале очередная К-я свеча подана на -ось сйважины и соединена tсвинчена ) с Той частью колонны, которая находится в скважине и удерживается potopHoro стола. В этом положении электропривод 5 приводит в.движение механизм лебедки с
талевой системой 6 и тадевый блок, несущий элеватор-устройство для удержания колонны бурильных труб, перемещается вверх, к верхнему замну свечи. После захвата элеватором К-й
свечи за муфту верхнего замка вес колонны передается с клиньев роторного стола на вышку и на выходе датчика 7 появляется сигнал. Управляемый ключ.8 срабатывает и, воздействуя
o на командный блок 1 записи и вывода информации, обеспечивает ввод информации о положении талевого блока в программно-задающую систему 2 и ее . запоминание.
5 Положение талевого блока над роторным столом в момент исчезновения нагрузки на клинья роторного стола, определяемое длиной свечи и величиной ее деформации растяжения под действием
0 веса колонны, является конечным при подъеме свечи, так как в этот момент нижний резьбовой разъем свечи нахо-. дится против механического ключа свинчивания-развинчивания, что необ5 хоДимо по технологии СПО.Устройство, в отличие от известного, не требует позиционирования свечи в режиме ручного управления приводом и исключает возможность
появления ошибочной информации, которая может привести к сбою в работе системы автоматического управления. При этом время на получение информации и ее запись уводится к минимуму. Этим обеспечивается значительная экономия времени, особенно при проводке сверхглубоких скважин, где объем СПО резко увеличивается с росTc i глубины.
Кроме того, как показал опыт про0 водки сверхглубокой скважины СГ-3 на Кольском полуострсше, компоновка колонны бурильных труб может изменяться от рейса к рейсу из-за того, что определённая часть их после
5 подъема из скважины подвергается дефектоскопии, а вместо них спускаются другие трубы. Это обстоятельство вынуждает производить запись информации о конечном положении талевого
0 блока практически при каждом спуске инструмента.
Иопользование предлагаемого устройства в этом случае приведет к существенной экономии времени,затрачиваемого на СПО.
Формула изобретения
в Устройство для автоматического управления приводом буровой лебедки при спуско-подъемных операциях, содержащее аналоговую систе гу, цифровую следящую систему, программно65 Зсщающую систему, электропривод,
роторный стол с клиньями и талевую систему буровой лебедки с талевым блоком/ командный блок записи и вывода информации, отличающееся тем, что,с целью повышения точности информации о конечном положении талевого блока при подъеме выбранной свечи,, оно снабжено датчиком усилия на клинья роторного стола и управляющим ключом, выход которого соединен с входом командного блока записи и вывода информации, а вход ключа соединен с датчиком усилия на клинья роторного
стола.
I
Источники информации, принятые во внимание при экспертизе 5. 1. Котляров A.M. Автоматизация буровых агрегатов. М., Недра, 1971, с. 103-106.
2, Система электропривода и автоматизации буровой установки Уралid маш - 15000. Инструкция по эксплуатации, ОЛА, 466703, ВНИИэлектропри вод, 1973, с. 181-201.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска и подъема бурильной колонны | 1981 |
|
SU1027376A1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| Способ контроля за наработкой элементов бурильной колонны | 1989 |
|
SU1714107A1 |
| СИСТЕМА, ОСНОВАННАЯ НА АНАЛИЗЕ ИЗОБРАЖЕНИЙ, ДЛЯ БУРОВЫХ РАБОТ | 2017 |
|
RU2740883C2 |
| Устройство для измерения длины колонны труб,спускаемых в скважину | 1986 |
|
SU1382930A2 |
| Способ оптимизации скорости спуска-подъема бурильной колонны | 1989 |
|
SU1765350A1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| МОБИЛЬНАЯ БЛОЧНО-МОДУЛЬНАЯ БУРОВАЯ УСТАНОВКА ПОВЫШЕННОЙ МОНТАЖНОЙ СПОСОБНОСТИ ГРУЗОПОДЪЕМНОСТЬЮ 1600, 2000 И 2250 кН | 2009 |
|
RU2420646C2 |
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 1969 |
|
SU236377A1 |
| Буровая установка для бурения с плавучего средства | 1980 |
|
SU939715A1 |
