ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет заявки на патент США № 62/341,522, поданной 25 мая 2016 г., содержание которой полностью включено в настоящий документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
Буровая установка используется в распространенных способах и системах бурения, используемых при бурении скважин для добычи нефти и других углеводородов. Буровая установка может включать в себя силовые средства вращения, такие как привод ведущей трубы и роторный стол, или верхний привод, который передает крутящий момент бурильной колонне. Бурильная колонна вращает буровое долото, расположенное в его самом нижнем конце, и таким образом создает скважину в пласте под буровой установкой.
Бурильная колонна обычно состоит из множества труб, которые добавляются к бурильной колонне последовательно таким образом, что часть бурильной колонны, которая выступает из ствола скважины, остается в указанном диапазоне высот по мере бурения ствола скважины. Работы, выполняемые оборудованием на буровой установке для добавления труб к бурильной колонне, могут зависеть от характеристик труб. Расстояния между трубами, свойства резьбы труб, а также крутящий момент и частота вращения, испытываемые трубами, составляющими бурильную колонну, могут предоставлять информацию для выполнения желаемых работ оборудования буровой установки. Может быть желательно измерять такие и другие свойства в реальном времени на площадке буровой установки.
Площадка буровой установки, которая не имеет таких измерений в реальном времени или близком к реальному времени, может испытывать потери эффективности, вызываемые началом или прекращением работы оборудования буровой установки в случаях, когда трубы не находятся в предпочтительном местоположении. Компоненты площадки буровой установки, для работы которых не предоставляется информация на основе таких измерений, могут быть подвержены повреждениям, таким как повреждения вследствие работы в неидеальных условиях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном аспекте данное изобретение относится к площадке буровой установки, включающей в себя по меньшей мере одну трубу, выполненную с возможностью вставки в ствол скважины на буровой установке, по меньшей мере одно устройство визуализации, выполненное с возможностью обнаружения местоположения конца по меньшей мере одной трубы или признака по меньшей мере одной трубы, и процессор, принимающий входные данные от по меньшей мере одного устройства визуализации и выполненный с возможностью расчета расстояния между концом по меньшей мере одной трубы и другим элементом, диаметра по меньшей мере одной трубы или перемещения по меньшей мере одной трубы.
В другом аспекте данное изобретение относится к способу выполнения буровых работ на площадке буровой установки, включающему в себя захват изображения трубы на площадке буровой установки, причем труба выполнена с возможностью вставки в ствол скважины на площадке буровой установки, обнаружение местоположения конца трубы или признака трубы с изображения, а также определение диаметра трубы, расстояния между обнаруженным концом трубы и другим элементом или перемещения трубы.
Другие аспекты и преимущества будут очевидны из последующего описания и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
ФИГ. 1 представляет собой схему площадки буровой установки в соответствии с настоящим изобретением.
ФИГ. 2 представляет собой схему площадки буровой установки в соответствии с настоящим изобретением.
ФИГ. 3 представляет собой схему площадки буровой установки в соответствии с настоящим изобретением.
ФИГ. 4a представляет собой схему вычислительной системы в соответствии с настоящим изобретением.
ФИГ. 4b представляет собой схему вычислительной системы в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее варианты осуществления настоящего изобретения будут описаны подробно со ссылками на сопровождающие Фигуры. Схожие элементы в различных фигурах могут обозначаться схожими ссылочными позициями в целях согласованности. Кроме того, в последующем подробном описании вариантов осуществления настоящего изобретения, изложены многочисленные конкретные подробности для обеспечения более глубокого понимания заявленного предмета изобретения. Однако среднему специалисту в данной области техники будет очевидно, что раскрываемые здесь варианты осуществления могут быть осуществлены на практике без этих конкретных подробностей. В других случаях известные признаки не описываются подробно во избежание неоправданного усложнения описания. Кроме того, среднему специалисту в данной области техники будет очевидно, что масштаб элементов, представленных на сопровождающих Фигурах, может варьироваться без отхода от объема настоящего изобретения.
В одном аспекте, настоящее изобретение относится к площадке буровой установки, включающей в себя по меньшей мере одну трубу, по меньшей мере одно устройство визуализации и по меньшей мере один процессор. Труба может быть выполнена с возможностью вставки в ствол скважины на буровой установке. Устройство визуализации может быть выполнено с возможностью захвата изображения местоположения конца по меньшей мере одной трубы. Процессор может принимать входные данные от по меньшей мере одного устройства визуализации. Процессор может быть выполнен с возможностью обнаружения местоположения конца по меньшей мере одной трубы на основе изображения. Процессор может быть выполнен с возможностью расчета расстояния между концом по меньшей мере одной трубы и другим элементом или расчета диаметра по меньшей мере одной трубы.
В некоторых вариантах осуществления системы и способы по настоящему изобретению могут использоваться и осуществляться на практике в сочетании с любым типом буровой установки, используемым в отрасли, например, береговыми, морскими, плавучими платформами, приводами роторных столов, верхними приводами и т. д.
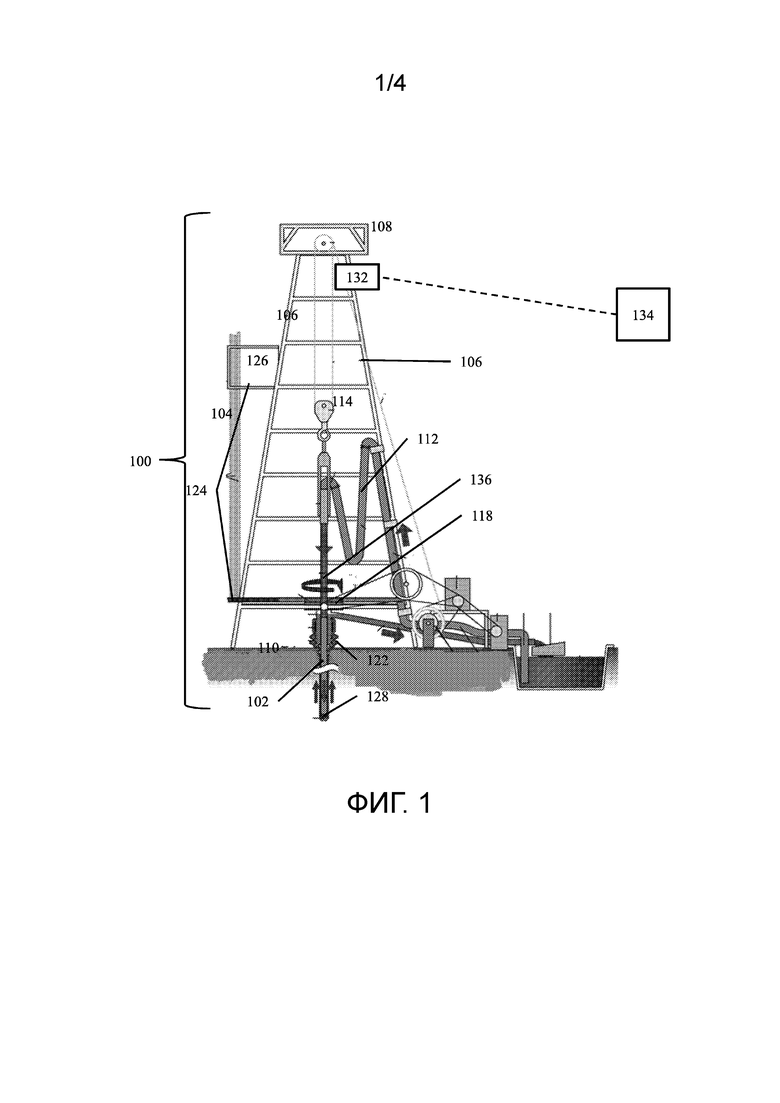
На ФИГ. 1 изображена буровая установка в соответствии с настоящим изобретением. Буровая установка 100 может использоваться для бурения ствола 102 скважины. Площадка буровой установки может включать в себя по меньшей мере одну трубу 104. Буровая установка 100 может также включать в себя вертикальную вышку 106, имеющую кронблок 108 на верхнем конце и горизонтальный пол буровой установки 110 на нижнем конце. Вышка 106 может поддерживать шланг 112 ведущей трубы, который может быть подвешена на талевом блоке 114.
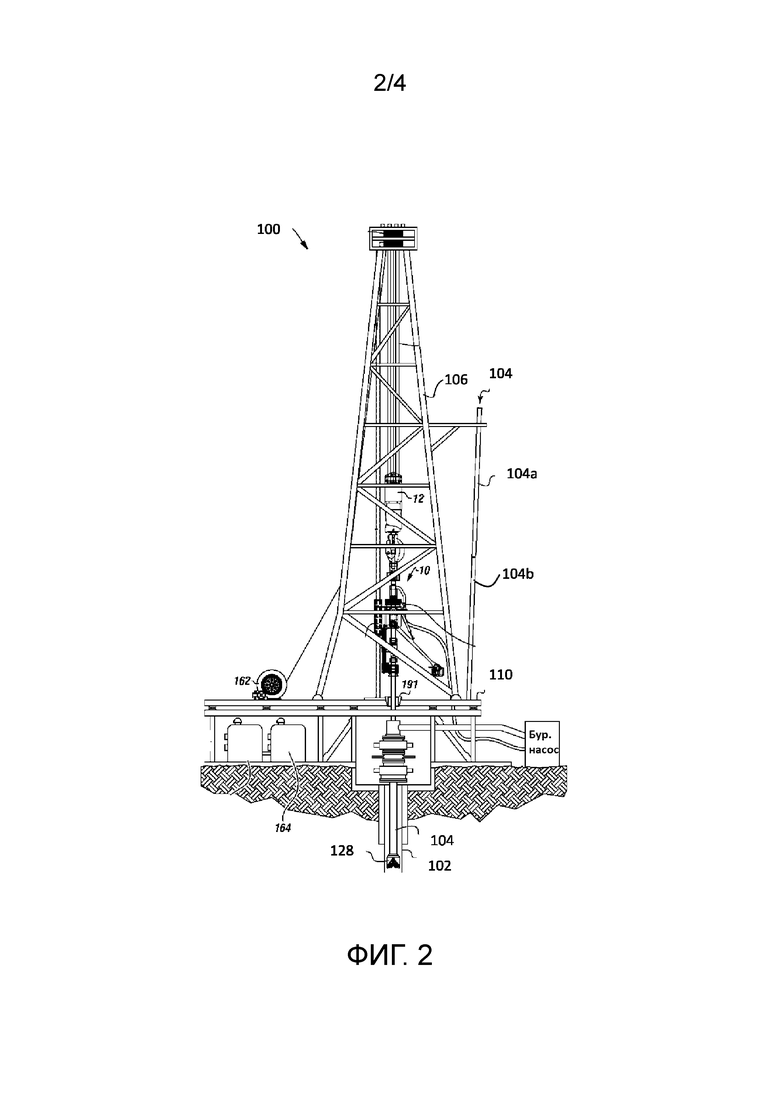
Буровая установка 100 может включать в себя привод 136 ведущей трубы и роторный стол 118, как показано на ФИГ. 1. Привод 136 ведущей трубы и роторный стол 118 могут поддерживаться вертикальной вышкой 106. Привод 136 ведущей трубы и роторный стол 118 могут быть способны вбуривать трубы 104 длиной до девяноста футов. В некоторых вариантах осуществления буровая установка 100 может не включать в себя привод 136 ведущей трубы или роторный стол. В некоторых вариантах осуществления, как показано на ФИГ. 2, буровая установка 100 может включать в себя верхний привод 10. Верхний привод 10 может быть прикреплен к вертикальной вышке 106 средствами, которые обеспечивают верхнему приводу 10 возможность вертикального перемещения вдоль вышки 106. Эти средства могут представлять собой подъемный блок 12, лебедку 162 и двигатель 164 лебедки. Верхний привод 10 может быть фиксировано подвешен на подъемном блоке 12, который в свою очередь может быть подвешен на вышке 106 посредством лебедки 162. Лебедка 162 может приводиться в действие двигателем 164 лебедки. Двигатель лебедки может быть расположен на полу 110 буровой установки. Верхний привод 10 может быть способен перемещаться по длине более девяноста футов. Верхний привод 10 может быть способен вбуривать трубы 104 длиной до девяноста футов. В некоторых вариантах осуществления буровая установка 100 может включать в себя любые средства для вращения и приведения в действие трубы, известные в данной области техники.
Шланг 112 ведущей трубы может быть прикреплен к бурильной колонне 120. Бурильная колонна 120 может состоять из труб 104. Нижний конец бурильной колонны 120 может быть расположен в стволе 102 скважины. Верхний конец бурильной колонны 120 может выступать из ствола 102 скважины и за пределы пола 110 буровой установки через отверстие в полу 110 буровой установки. Периодически в отверстие в полу 110 буровой установки может быть помещен клиновой захват (показанный на ФИГ 2 как 191). Клиновой захват может поддерживать бурильную колонну 120 на уровне пола 110 буровой установки и предотвращать дальнейшее перемещение бурильной колонны 120 внутрь ствола 102 скважины при свинчивании нового соединения или развинчивании соединения при спуске в скважину или подъеме из скважины соответственно. Клиновой захват может быть способен затягиваться для предотвращения перемещения бурильной колонны 120 и ослабляться для предоставления возможности перемещения бурильной колонны 120.
В некоторых вариантах осуществления трубы 104 могут быть соединены вместе для формирования свечей. Свеча может включать в себя две или более трубы 104, которые были скручены друг с другом перед вводом в ствол скважины. В некоторых вариантах осуществления свеча может включать в себя две или три трубы 104, которые были скручены друг с другом. На ФИГ. 2 показана свеча, которая включает в себя две трубы 114a, 104b. В данном описании термин «труба» может использоваться для обозначения одиночной трубы или свечи, включающей в себя две или более труб, если не указано иное. Кроме того, хотя настоящий вариант осуществления показывает бурильную колонну в виде труб, также понимается, что труба может также относиться, например, к обсадной колонне или компонентам КНБК, таким как утяжеленные бурильные трубы, переводники, измерительные инструменты и т. д. На буровой установке 100, отдельные трубы 104 или свечи труб 104 могут располагаться на трубном стеллаже 124. Трубный стеллаж 124 может включать в себя магазин 126 для свечей.
При проведении бурильных работ буровая установка 100 может быть собрана над площадкой, на которой желательно создать ствол 102 скважины. Трубы 104 могут быть собраны в свечи. Сборка свечей может быть выполнена на полу 110 буровой установки. Для сборки свечей может использоваться такой инструмент, как устройство для механизированной подвески и свинчивания/развинчивания труб (не показано). Трубы 104, либо по отдельности, либо будучи собранными в свечи, могут быть расположены в трубном стеллаже 124, при этом один конец трубы 104 подвешивают на магазине 126 для свечей, а другой конец опирается на нижнюю часть трубного стеллажа 124. Для расположения труб 104 в трубном стеллаже 124 может использоваться кран (не показан) или другой инструмент, способный поднимать большие грузы.
Буровое долото 128 может быть прикреплено к концу трубы 104. Если буровая установка 100 включает в себя привод 136 ведущей трубы и роторный стол 118, труба 104 может быть прикреплено к приводу 136 ведущей трубы, входящему в зацепление с роторным столом 118. Конец трубы 104, который не прикреплен к буровому долоту 128, может быть прикреплен к приводу 136 ведущей трубы. Если буровая установка 16 включает в себя верхний привод 10, конец трубы 104 может быть прикреплен к верхнему приводу 10. Труба 104 может быть прикреплена к верхнему приводу 10 таким образом, что верхний привод 10 входит в зацепление с трубой 104 в конце или возле конца трубы 104, который не прикреплен к буровому долоту 128. Труба 104, прикрепляемая к верхнему приводу 10 или приводу 136 ведущей трубы, может располагаться над отверстием в полу 110 буровой установки, которое обеспечивает возможность доступа к земле внизу. Привод 136 ведущей трубы и роторный стол 118 или верхний привод 10 могут поддерживать массу трубы 104.
Привод 136 ведущей трубы и роторный стол 118 или верхний привод 10 могут вращать трубу 104 и перемещать трубу 104 вертикально. Буровое долото 128 может врезаться в землю под полом 110 буровой установки, создавая ствол 102 скважины. При бурении шланг 112 ведущей трубы может использоваться для закачивания бурового раствора или бурового глинистого раствора в бурильную колонну 120. Буровой раствор или буровой глинистый раствор может смазывать буровое долото 128 в ходе бурильных работ и выносить буровой шлам на поверхность.
Когда часть трубы 104 находится ниже пола 110 буровой установки, вращение и вертикальное перемещение привода 136 ведущей трубы или верхнего привода 10 может быть остановлен. Большая часть трубы 104 может находиться ниже пола 110 буровой установки. Часть трубы 104, которая находится над полом 110 буровой установки, может называться выступом трубы. Выступ трубы 330 показан на ФИГ. 3. Клиновой захват (показанный на ФИГ. 2 как 191) может быть затянут вокруг трубы 104 и поддерживать массу трубы 104. Труба 104 может быть отсоединена от верхнего привода 10 или привода 136 ведущей трубы. Верхний привод 10 или привод 136 ведущей трубы может быть перемещен вертикально по направлению вверх от выступа трубы 330.
Труба 104 может быть снята с трубного стеллажа 126. Труба 104 может быть расположен таким образом, чтобы один конец трубы 104 был приближен к концу выступа трубы 330. Труба 104 может поддерживаться краном (не показан) или другим инструментом, способным поднимать большие грузы. Инструмент может быть прикреплен к вышке 106 и поддерживаться ней. Когда конец трубы 104 находится на желаемом расстоянии от конца выступа трубы 330, устройство для механизированной подвески и свинчивания/развинчивания труб (не показано) или другой инструмент может использоваться для прикручивания трубы 104 к выступу трубы 330. Конец трубы 104, который не прикреплен к выступу трубы 330, может быть прикреплен к приводу 136 ведущей трубы и роторному столу 118 или верхнему приводу 10.
Трубы 104, расположенные в стволе 102 скважины, могут составлять бурильную колонну 120. Трубы 104, которые присоединяют к трубам 104, которые находятся в стволе 102 скважины, но которые сами располагаются над стволом 102 скважины, могут также составлять бурильную колонну 120. По мере прикрепления новых труб 104 к бурильной колонне 120 и вбуривания в ствол 102 скважины, новые трубы 104 становятся частью бурильной колонны 120. Бурильная колонна 120 может включать в себя любое число труб 104.
По прикреплении трубы 104 к выступу трубы, клиновой захват может быть ослаблен на бурильной колонне 120. Масса бурильной колонны 120 может поддерживаться приводом 136 ведущей трубы или верхним приводом 10, который далее поддерживается лебедкой посредством бурового каната (не показан). Привод 136 ведущей трубы и роторный стол 118 или верхний привод 10 могут вращать бурильную колонну 120 и перемещать бурильную колонну 120 вертикально. Буровое долото 128 может врезаться в землю в забое ствола 102 скважины, углубляя таким образом ствол 102 скважины. При бурении шланг 112 ведущей трубы может использоваться для закачивания бурового раствора или бурового глинистого раствора в бурильную колонну 120. Буровой раствор или буровой глинистый раствор может смазывать буровое долото 128 в ходе бурильных работ.
Когда часть последней трубы 104, добавленной к бурильной колонне 120, находится ниже пола 110 буровой установки, вращение и вертикальное перемещение привода 136 ведущей трубы или верхнего привода 10 может быть остановлено. Часть последней добавленной трубы 104, которая находится над полом 110 буровой установки, может называться выступом трубы 330. Вокруг бурильной колонны 120 может быть затянут клиновой захват 191.
Процесс, описанный выше, может быть повторен для добавления другой трубы 104 к бурильной колонне 120 и дальнейшего углубления ствола 102 скважины. Данный процесс может быть повторен до тех пор, пока ствол 102 скважины не будет иметь желаемую глубину. Данный процесс может быть повторен любое число раз. После бурения до желаемой глубины (либо до полной глубины, либо до заданного этапа), бурильная колонна 120 может быть поднята из скважины. Если желательно дальнейшее проведение работ, в скважину может быть опущена обсадная колонна (не показана) и цементироваться на месте.
Буровая установка 100 может включать в себя одно или более устройств 132 визуализации. Устройство 132 визуализации может представлять собой любой тип устройства, способного захватывать изображение площадки буровой установки. В некоторых вариантах осуществления устройство 132 визуализации может представлять собой камеру, видеокамеру, устройство ультразвуковой визуализации, устройство электромагнитной визуализации, устройство тепловой визуализации, лазерный дальномер или устройство триангуляции. В площадку буровой установки также может быть включено другое оборудование, необходимое для использования конкретного типа устройства визуализации. Например, если устройство 132 визуализации представляет собой устройство тепловой визуализации, площадка буровой установки может также включать в себя оборудование, способное вводить тепло в компоненты, которые визуализируют, для создания теплового градиента, который может захватываться устройством 132 визуализации. Устройство 132 визуализации может захватывать двумерные изображения или трехмерные изображения. В некоторых вариантах осуществления устройство 132 визуализации может представлять собой любой тип устройства визуализации, известный в данной области техники. Буровая установка 100 может включать в себя любое число устройств 132 визуализации.
Устройство(-а) 132 визуализации может быть прикреплено к буровой установке 100 или может представлять собой отдельное устройство, присутствующее на площадке буровой установки. В некоторых вариантах осуществления устройство 132 визуализации может быть фиксировано прикреплено к буровой установке 100. Устройство 132 визуализации может быть расположено таким образом, чтобы устройство 132 визуализации было способно захватывать изображения, которые включают в себя по меньшей мере один конец по меньшей мере одной трубы 104. Устройство 132 визуализации может быть способно захватывать изображения труб, включающих в себя определенный конец определенной трубы 104, в желаемой точке в процессе бурения, описанном выше. Устройство(-а) 132 визуализации может быть способно захватывать изображения труб, в частности конец определенной трубы 104, во множестве желаемых точек в процессе бурения, описанном выше. Устройство 132 визуализации может иметь широкое поле обзора. Множество устройств 132 визуализации могут быть включены в систему для захвата изображений определенного конца трубы во множестве желаемых точек в процессе бурения, описанном выше. В некоторых случаях изображение, захватываемое устройством 132 визуализации, может также включать в себя другой желаемый элемент, такой как смежная труба или другие компоненты установки, такие как приводное устройство. Множество устройств 132 визуализации могут использоваться для одновременного захвата изображений определенного конца определенной трубы 104 и другого элемента.
Изображения могут быть переданы процессору 134. Процессор 134 может быть способен обнаруживать определенный конец определенной трубы 104 на изображениях. В некоторых вариантах осуществления для облегчения обнаружения к трубе 104 может быть прикреплен или в ней может быть образован маркер (не показан). Процессор 134 может также быть способен обнаруживать другой элемент на изображениях без крепления какого-либо дополнительного маркера в трубе. В качестве опорного маркера для обнаружения желаемого признака может использоваться существующий признак на трубе, такой как заплечик резьбы или край трубы и т. д. Например, процессор 134 может использовать обнаружение краев, геометрическое моделирование, машинное обучение, обнаружение признаков, описание признаков, сопоставление признаков, некоторую комбинацию данных процессов или любую методику, известную в данной области техники. Процессор 134 может быть способен обнаруживать желаемый другой элемент на изображениях. Для облечения обнаружения к другому элементу может быть прикреплен или в нем может быть образован маркер (не показан). Процессор 134 может также быть способен обнаруживать другой элемент на изображениях без крепления какого-либо дополнительного маркера в трубе. В качестве опорного маркера для обнаружения желаемого признака может использоваться существующий признак на трубе, такой как заплечик резьбы или край трубы и т. д. В одном или более вариантах осуществления, присутствие маркера может использоваться для распознавания образов. Например, после захвата (и последующего сохранения) маркера процессор 134 может распознавать маркер с последующего изображения, которое захватывают. Это может применяться, например, для бурильного замка, когда трубы и соединение сначала опускают в скважину, а затем впоследствии поднимают из скважины.
Процессор 134 может иметь доступ к данным о площадке буровой установки. В некоторых вариантах осуществления процессор 134 может иметь доступ к информации о местоположении устройства 132 визуализации, расстоянии между фиксированными компонентами площадки буровой установки, размере инструментов, используемых на буровой установке, или другой пространственной или размерной информации.
В некоторых вариантах осуществления процессор 134 может рассчитывать расстояние от конца трубы 104 до другого элемента (который может фактически являться другим концом той же трубы 104) на основе местоположений конца трубы 104 и другого элемента, который процессор 134 обнаруживает на изображениях. Изображения, захватываемые устройством 132 визуализации, могут также необязательно включать в себя опорный элемент. Размерный параметр(-ы), например длина, опорного элемента может быть известен. Расстояние между опорным элементом и устройством захвата изображений может также быть известно. Опорный элемент может представлять собой элемент, включенный в площадку буровой установки специально для этой цели, или он может представлять собой функциональный элемент площадки буровой установки, имеющий известную длину, такой как часть вышки. Процессор 134 может определять длину опорного элемента на изображении в пикселях. На основании измерения опорного элемента, размера пикселей и расстояния между опорным элементом и устройством захвата изображений, процессор 134 может определять преобразование пикселей в физическую длину и расстояние между объектом и устройством захвата изображений. Процессор 134 может определять, исходя из изображения, длину между концом трубы 104 и другим элементом в пикселях. Процессор 134 может использовать преобразование для определения физического расстояния между концом трубы 104 и другим элементом. Расстояние от устройства 132 визуализации до опорного элемента, фокусное расстояние линзы устройства 132 визуализации и/или размер всего изображения в пикселях могут быть известны процессору 134. Эта информация может использоваться для определения преобразования пикселей в физическую длину и, таким образом, определения расстояния между концом трубы 104 и другим элементом. Расстояние до опорного объекта от устройства 132 визуализации может быть установлено посредством измерения, производимого при настройке системы, или посредством акустической дальнометрии или каким-либо другим способом. Если система включает в себя более одного устройства 132 визуализации или включает в себя устройство 132 визуализации, которое может занимать множество положений, может использоваться метод параллакса. Процессор 134 может также определять относительное перемещение (такое как боковое смещение) одной и той же трубы, исходя из некоторого числа изображений, полученных в разное время. В некоторых вариантах осуществления процессор 134 может определять скорость трубы 104. Частота кадров устройства 132 визуализации может быть известна процессору 134. Частота кадров устройства 132 визуализации может определяться на основе известной скорости затвора и движения фиксации. Длина трубы 104 может определяться на основе прохождения конца трубы 104 и другого элемента, который может представлять собой другой конец трубы 104, по маркеру. Процессор 134 может использовать следующее уравнение для анализа изображений, собираемых в ходе такого процесса, и определения длины трубы 104.
(V x Fn)/Fr=L
где V=скорость, Fn=число кадров, Fr=частота кадров, а L=длина трубы.
В некоторых вариантах осуществления процессор 134 может использовать любой способ, известный в данной области техники, для расчета расстояния между концом трубы и другим элементом на основе изображения.
Расстояние между концом трубы 104 и другим элементом, рассчитанное процессором 134, может предоставлять информацию для работы другого элемента площадки буровой установки. В некоторых вариантах осуществления расстояние может отображаться человеку-оператору другого элемента площадки буровой установки. Человек-оператор может принимать решения о работе элемента площадки буровой установки на основе отображаемого расстояния. В некоторых вариантах осуществления процессор 134 может непосредственно отдавать команды другому элементу площадки буровой установки на основе рассчитанного расстояния. В некоторых вариантах осуществления процессор 134 может осуществлять связь с процессором, программируемым логическим контроллером (ПЛК) или другой системой управления, подключенной непосредственно к другому элементу площадки буровой установки. Процессор или ПЛК для конкретного элемента может отдавать команды элементу площадки буровой установки на основе рассчитанного расстояния. В данном описании утверждение о том, что процессор 134 отдает команды элементу площадки буровой установки, может включать в себя любую из командных процедур выше или любую их комбинацию. Таким образом, упоминание процессора 134 может охватывать значительно больше, чем одиночный процессор.
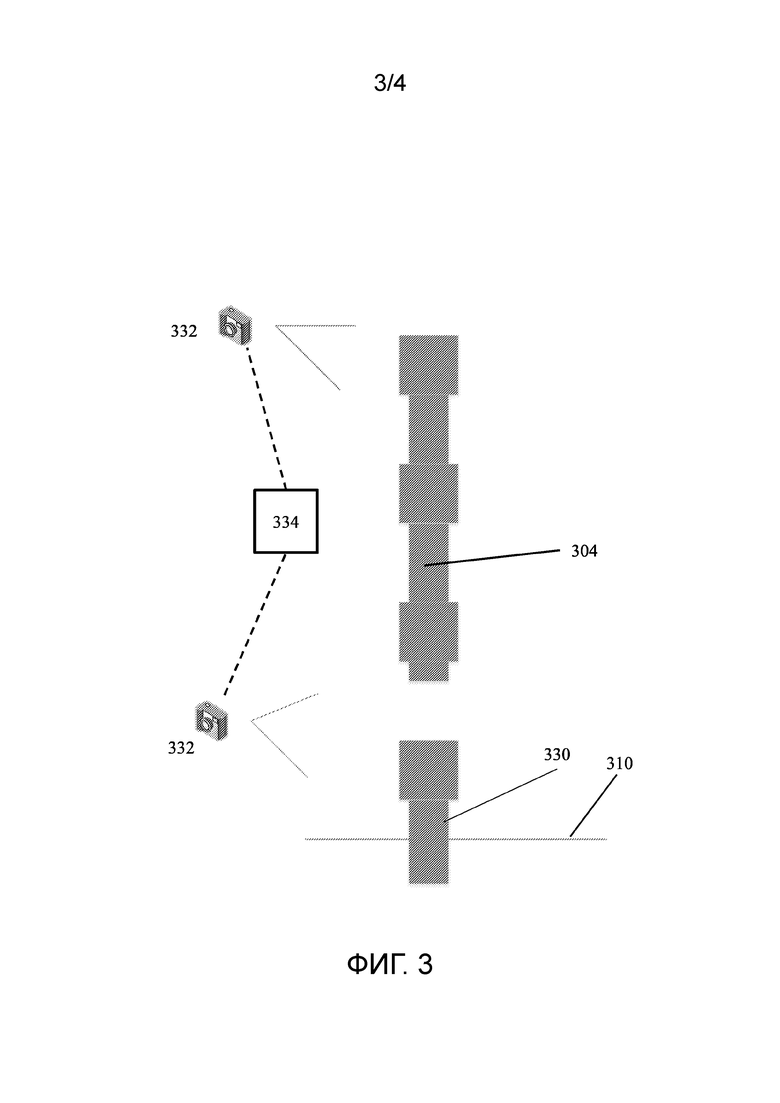
Как показано на ФИГ. 3, устройства 332 визуализации могут захватывать изображение нижнего конца трубы 304 и верхнего конца выступа трубы 330 (т. е. другой трубы, выступающей над полом буровой установки). Процессор 334 может рассчитывать расстояние между концом трубы 304 и выступом трубы 330. Процессор 334 может инициировать команду устройству для механизированной подвески и свинчивания/развинчивания труб (не показано) на основе рассчитанного расстояния. Если определено, что расстояние составляет желаемое значение, процессор 334 может инициировать команду устройству для механизированной подвески и свинчивания/развинчивания труб на скручивание трубы 304 и выступа трубы 330 друг с другом. Такая процедура может предотвращать задействование устройства для механизированной подвески и свинчивания/развинчивания труб, когда труба 304 и выступ трубы 330 находятся слишком далеко друг от друга или слишком близко друг к другу.
В некоторых вариантах осуществления устройства 332 визуализации могут захватывать изображение верхнего конца выступа трубы 330 и пола 310 буровой установки. Следует отметить, что выступ трубы 330 состоит из трубы 304. Процессор 334 может рассчитывать расстояние между верхним концом выступа трубы 330 и полом 310 буровой установки. Расстояние может называться высотой выступа трубы. Применительно к ФИГ. 1 и 2, это измерение может выполняться при вращении бурильной колонны 120 верхним приводом 10 или роторным столом 118 и приводом 136 ведущей трубы. На основе рассчитанного расстояния процессор 334 может отдавать команды верхнему приводу 10 или роторному столу 118 и приводу 136 ведущей трубы. Если определенно, что расстояние составляет желаемое значение, процессор 334 может инициировать команду верхнему приводу 10 или роторному столу 118 и приводу 136 ведущей трубы на останов вращения бурильной колонны 120. Эта процедура может предотвращать ввод бурильной колонны 120 на такую глубину, при которой высота выступа трубы была бы слишком большой или слишком малой. Кроме того, высота выступа трубы может использоваться в качестве опорной высоты для следующей колонны труб 304, которую необходимо подсоединить и скрутить с выступом трубы 330, например посредством автоматизированного опускания следующей трубы 304 посредством лебедки на высоту, подходящую для соединения с выступом трубы 330, и/или устройства автоматизированного скручивания (устройства механизированной подвески и свинчивания/развинчивания труб).
В некоторых вариантах осуществления устройство 132 визуализации может захватывать изображение обоих концов трубы 104. Процессор 134 может рассчитывать расстояние между двумя концами трубы 104, т. е. длину трубы 104. Расчеты длин труб 104, которые составляют бурильную колонну 120, могут использоваться для оценки длины бурильной колонны 120 и глубины ствола 102 скважины. Такое измерение может использоваться для создания электронной метки, которая может связывать идентификационные данные трубы 104 с ее соответствующей длиной, определяемой таким образом. Оценочная пробуренная глубина ствола 102 скважины может использоваться при заканчивании ствола 102 скважины в секции коллектора. Такая определенная длина может обеспечивать возможность более точного и более эффективного заканчивания ствола 102 скважины. Например, длина продуктивного пласта коллектора может составлять только 50 футов, тогда как общая глубина скважины может составлять значительно больше, например от 10000 до 20000 футов. Таким образом, в результате ошибок в общей пробуренной длине может быть не достигнут продуктивный пласт. Следовательно, путем расчета длины бурильной колонны, при котором суммируется длина каждой отдельной трубы, составляющей бурильную колонну, ствол скважины может заканчиваться в таком продуктивном пласте коллектора при более точном определении достижения продуктивного пласта. Использование фактических длин труб, которые составляют общую пробуренную глубину, может быть более точным, чем оценки на основе других компонентов установки, таких как лебедки. В одном или более вариантах осуществления, общая пробуренная глубина может быть рассчитана, исходя из измерения длин труб после растяжения труб под массой общей бурильной колонны 120 в скважине. Таким образом, также понимается, что такие расчеты длины могут также выполняться для компоновки низа бурильной колонны, и что такие расчеты могут также выполняться для свечи труб по мере ее сооружения на приемных мостках или полу буровой установки, например в шурфе для наращивания труб.
Рассчитанные длины труб 104, которые составляют бурильную колонну 120, могут также использоваться при выведении бурильной колонны 120 из ствола скважины для прогноза того, когда соединение, соединяющее две трубы 104, достигнет пола 110 буровой установки. Такой прогноз может улучшать способность оборудования ствола скважины, поднимающего бурильную колонну 120, останавливаться, когда соединение находится на высоте, на которой оно может развинчиваться, с тем чтобы самая верхняя труба 104 могла быть отсоединена от бурильной колонны 120, а также для автоматизации развинчивания бурильного замка и подвешивания трубы (труб) 104 на трубном стеллаже 124. Кроме того, распознавание образов в бурильном замке может аналогичным образом использоваться для развинчивания бурильных замков при подъеме из скважины.
В некоторых вариантах осуществления устройство 132 визуализации может захватывать изображение верхнего конца трубы 104 и магазина 126 для свечей трубного стеллажа 124. Процессор 134 может рассчитывать расстояние между верхним концом трубы 104 и магазином 126 для свечей трубного стеллажа 124. Измерение может выполняться при перемещении трубы 104 для подвешивания в магазине 126 для свечей. На основе измерения процессор 134 может отдавать команды крану (не показан) или другому инструменту, который используется для подъема и перемещения трубы 104. Например, кран может быть перемещен быстрее, если верхний конец трубы 104 находится относительно далеко от магазина 126 для свечей, и замедляться по мере приближения трубы к магазину 126 для свечей.
В некоторых вариантах осуществления устройство 132 визуализации может захватывать изображение верхнего привода 10 или привода 136 ведущей трубы и/или пола 110 буровой установки и его соединения с любой трубой 304. Процессор 134 может рассчитывать расстояние между верхним приводом 10 или приводом 136 ведущей трубы и полом 110 буровой установки. Таким образом, хотя для индикации перемещения привода на верхнем приводе 10 или приводе 136 ведущей трубы могут традиционно размещаться датчики, одно только перемещение не обеспечивает индикацию того, опускается ли бурильная колонна в стволе скважины в ствол скважины. На основе захватываемых изображений, которые могут обеспечивать индикацию того, подсоединена ли бурильная колонна к верхнему приводу или к приводу ведущей трубы, перемещение блока (посредством лебедки) может использоваться в автоматизированном расчете для определения того, меняется ли глубина бурового долота в результате изменения положения блока.
В некоторых вариантах осуществления устройство 132 визуализации может захватывать множество изображений с течением времени, а процессор 134 может рассчитывать расстояние между концом трубы 104 и другим элементом на каждом изображении. Процессор 134 может выполнять расчеты в реальном времени. Когда определяется, что расстояние между концом трубы 104 и другим элементом равно желаемому значению или составляет больше или меньше порогового значения, процессор 134 может отдавать команду другому элементу буровой установки на выполнение определенного действия. В одном или более вариантах осуществления использование множества последовательных изображений может обеспечивать процессору возможность расчета отличий между изображениями.
Например, устройство 132 визуализации может захватывать последовательность изображений, включающих в себя нижний конец трубы 104, которая должна быть добавлена к бурильной колонне 120, и верхний конец выступа трубы 330. Процессор 134 может рассчитывать расстояние между нижним концом трубы 104 и верхним концом выступа трубы 330 на каждом изображении. Расчеты могут выполняться в реальном времени. Когда расстояние между нижним концом трубы 104 и верхним концом выступа трубы 330 составляет меньше порогового значения, процессор может отдавать команду устройству для механизированной подвески и свинчивания/развинчивания труб на вхождение в зацепление с трубой 104 и выступом трубы 330. Аналогичные процедуры последовательной визуализации и расчета могут выполняться для любых процедур, проводимых на площадке буровой установки, описанных выше.
Устройство 132 визуализации может захватывать ряд изображений бурильной колонны 120 по мере вбуривания бурильной колонны 120 в ствол 102 скважины. Процессор 134 может выявлять и характеризовать вибрации, испытываемые трубой 104 (в качестве части бурильной колонны 120), на основе множества последовательных изображений трубы 104, захватываемых с течением времени. Процессор может выявлять опорную точку, такую как конец трубы 104 или соединение, соединяющее две трубы 104, на каждом изображении. Процессор может определять расстояние перемещения опорной точки между изображениями. Процессор 134 может использовать захватываемое изображение для определения интенсивности вибрации бурильной колонны (такой как амплитуда вибрации). Кроме того, как упоминалось выше, также предусматривается, что процессор 134 может использовать распознавание образов для выявления образов в последовательности изображений, захватываемых устройством 132 визуализации, для расчета частоты вращения (об/мин) бурильной колонны.
Процессор 134 может отдавать команды верхнему приводу 10 или приводу 136 ведущей трубы на основе определяемой вибрации, крутящего момента или частоты вращения, испытываемых бурильной колонной 120. Команда от процессора 134 может изменять крутящий момент или частоту вращения, с которой вращается верхний привод 10 или привод 136 ведущей трубы. Такая процедура может обеспечивать возможность регулировки работы верхнего привода 10 или привода 136 ведущей трубы в реальном времени на основе условий для уменьшения вибрации. При таком сценарии измерение вибрации посредством захватываемых изображений может использоваться в качестве сигнала обратной связи для управления вращением верхнего привода. Таким образом, например, такие наблюдения на поверхности могут обеспечивать возможность определения условий в скважине, таких как неравномерное движение, вихревое движение и т. д., которым можно противодействовать путем изменения параметров бурения, таких как скорость, крутящий момент и т. д. Таким образом, в некоторых вариантах осуществления расстояние, рассчитанное процессором 134, может использоваться процессором 1134 для выполнения дальнейших расчетов, таких как свойства бурильной колонны 120, включающие в том числе описанные выше.
Например, также предусматривается, что настоящая система может использоваться для расчета нагрузки на крюк. Устройство 132 визуализации может захватывать изображение трубы 104, подвешенной на верхнем приводе 10 или на приводе 136 ведущей трубы и роторном столе 118, или такое изображение может захватываться до крепления трубы 104 к верхнему приводу 10 или приводу 136 ведущей трубы. Нижний конец трубы 104 может не быть прикреплен ни к каким другим элементам. Процессор 134 может рассчитывать расстояние между нижним концом трубы 104 и верхним концом трубы 104 на основе изображения как нерастянутую длину трубы 104. Нижний конец трубы 104 может быть прикреплен к бурильной колонне 120 посредством устройства механизированной подвески и свинчивания/развинчивания труб или другого инструмента. Клиновой захват (не показан) может быть ослаблен вокруг бурильной колонны 120 таким образом, чтобы бурильная колонна 120 подвешивалась на трубе 104. Масса бурильной колонны 120 может вызывать растяжение трубы 104. Устройство 132 визуализации может захватывать второе изображение трубы 104, подвешенной на верхнем приводе 10 или приводе 136 ведущей трубы и роторном столе 118. Процессор 134 может рассчитывать расстояние между нижним концом трубы 104 и верхним концом трубы 104 на основе второго изображения. Расстояние может представлять собой растянутую длину трубы 104. Изменение длины трубы 104 между первым измерением и вторым измерением может использоваться для расчета нагрузки на крюк системы. Процессор может также иметь доступ к другим свойствам площадки буровой установки, необходимым для расчета нагрузки на крюк. Например, процессор может иметь доступ к свойствам материалов труб 104 и другим размерным свойствам труб, таким как диаметр.
Хотя в вышеприведенном описании для расчета нагрузки на крюк используется только информация, получаемая посредством устройства 132 визуализации, также предусматривается, что посредством датчиков, подсоединенных к верхнему приводу 10 или приводу 136 ведущей трубы, может определяться положение верхнего привода 10 или положение привода 136 ведущей трубы. Процессор 134 может иметь доступ к этой информации о положении для расчета нагрузки на крюк. Процессор 134 может рассчитывать растянутую или нерастянутую длину трубы 104 на основе как изображения нижнего конца трубы 104, так и положения верхнего привода 10 или привода 136 ведущей трубы от датчика. Процессор 134 может использовать растянутую длину и нерастянутую длину трубы, рассчитанную таким образом, для определения нагрузки на крюк.
В некоторых вариантах осуществления системой по настоящему изобретению может также рассчитываться диаметр. В частности, процессор может использовать захватываемые изображения трубы 104 для расчета диаметра трубы 104. Устройство 132 визуализации может захватывать изображение трубы 104 в виде сбоку или в виде сверху. Изображение, захватываемое устройством визуализации, может также включать в себя устройство эталонной (опорной) величины (не показано). Изображения, захватываемые устройством 132 визуализации, могут также включать в себя элемент эталонной (опорной) величины. Длина опорного элемента и/или его расстояние относительно устройства захвата изображений могут быть известны. Опорный элемент может представлять собой элемент, включенный в площадку буровой установки специально для этой цели, или он может представлять собой функциональный элемент площадки буровой установки, имеющий известную длину, такой как часть вышки. Процессор 134 может определять длину опорного элемента на изображении в пикселях. Процессор 134 может определять диаметр трубы 104, исходя из ширины трубы 104 на виде сбоку, или посредством преобразования эллипса на виде с конца трубы 104 в круг на основе угла между устройством 132 визуализации и плоскостью, перпендикулярной продольной оси трубы 104. Процессор 134 может определять преобразование пикселей в физический размер на основе длины изображения опорного элемента. Процессор 134 может определять диаметр трубы в пикселях.
В некоторых вариантах осуществления процессор 134 может определять свойство резьбы трубы 104 на основе рассчитанного диаметра. Процессор 134 может выявлять повреждение резьбы. Процессор 134 может проверять наружную резьбу на основе изображений, захватываемых устройством 132 визуализации. Множество изображений резьбы трубы 104 может использоваться для выявления повреждения. Процессор 134 может категоризировать трубы 104 как пригодные к использованию или не пригодные к использованию на основе выявленного повреждения их резьбы. Процессор 134 может определять, можно ли соединить две трубы 104, на основе их диаметров и резьбы. Процессор может использовать распознавание образов для выявления повреждения резьбы. При выявлении поврежденной или несовпадающей резьбы, процесс может передавать информацию автоматизированной системе управления, с тем чтобы автоматизированная система управления автоматически отбраковывала данную трубу, прежде чем она будет размещена в трубном стеллаже или прежде чем она будет соединена с другой трубой или бурильной колонной 120.
В некоторых вариантах осуществления выявление повреждения резьбы может выполняться перед размещением труб 104 на трубном стеллаже 124. Трубы 104, которые определяются как имеющие повреждение резьбы, которое делает трубы 104 непригодными к использованию, не могут размещаться на трубном стеллаже 124. В некоторых вариантах осуществления выявление повреждения резьбы может выполняться после выведения труб 104 из ствола 102 скважины. Перед захватом устройством визуализации 132 изображений труб 104, трубы 104 могут очищаться. Буровая установка 100 может включать в себя механические или гидравлические средства очистки труб 104 и соединений, соединяющих трубы 104, во время или после выведения труб 104 из ствола 102 скважины.
В некоторых вариантах осуществления устройство 132 визуализации может захватывать ряд изображений, содержащих маркер или известный признак трубы, который может являться или не являться концом трубы 104. Процессор 134 может обнаруживать местоположение маркера или известного признака в каждом ряде изображений. Процессор 134 может рассчитывать свойство перемещения трубы 104 на основе ряда изображений. Например, процессор 134 может рассчитывать частоту вращения трубы 104 на основе ряда изображений и времени захвата изображений. Процессор 134 может отдавать команды верхнему приводу 10 или роторному столу 118 и приводу 136 ведущей трубы на основе рассчитанной частоты вращения.
В некоторых вариантах осуществления на основе обнаруживаемого перемещения процессор 134 может рассчитывать свойство вибрации бурильной колонны 120 на основе ряда изображений. Например, процессор 134 может измерять амплитуду или частоту вибрации бурильной колонны 120. На основе расчета процессор 134 может отдавать команды верхнему приводу 10 или роторному столу 118 и приводу 136 ведущей трубы. Задаваемая командой операция верхнего привода 10 или роторного стола 118 и привода 136 ведущей трубы может минимизировать вибрацию.
В некоторых вариантах осуществления буровая установка 100, которая включает в себя устройство 132 визуализации и процессор 134, может включать в себя один или более датчиков (не показаны). Датчики могут осуществлять связь с процессором 134. Данные, собираемые датчиками, могут использоваться в сочетании с расстояниями, рассчитанными на основе изображений, захватываемых устройством 132 визуализации, для выполнения дальнейших расчетов и командного управления работой элементов площадки буровой установки.
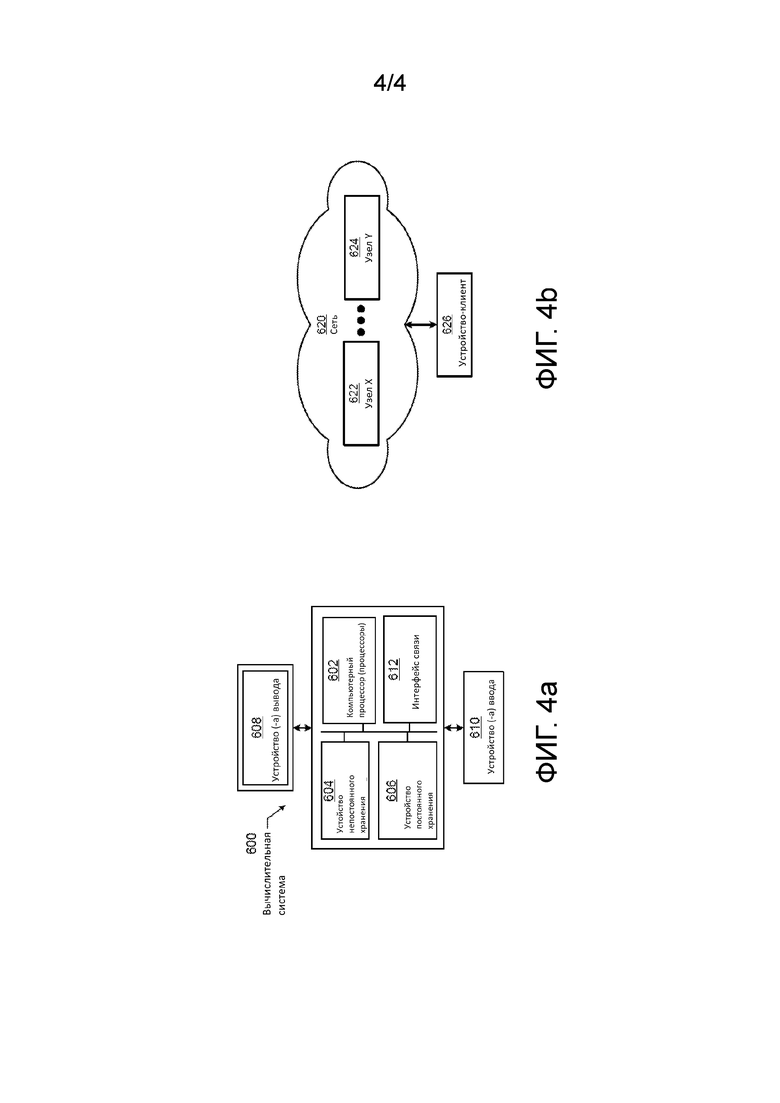
Варианты осуществления настоящего изобретения могут быть реализованы в вычислительной системе. Вычислительная система может включать в себя по меньшей мере процессор 134 и устройство 132 визуализации. Вычислительная система может включать в себя процессоры или ПЛК (программируемый логический контроллер), подключенные к конкретным элементам площадки буровой установки. Может использоваться любая комбинация мобильного, настольного, серверного, маршрутизирующего, коммутационного, встроенного устройства или других типов аппаратных средств. Например, как показано на ФИГ. 4a, вычислительная система 600 может включать в себя один или более компьютерных процессоров 602, устройство 604 непостоянного хранения (например, энергозависимую память, такую как оперативное запоминающее устройство (ОЗУ), кэш-память), устройство 606 постоянного хранения (например, жесткий диск, привод оптических дисков, такой как привод компакт-дисков (CD) или привод цифровых универсальных дисков (DVD), и т. д.), интерфейс 612 связи (например, интерфейс Bluetooth, инфракрасный интерфейс, сетевой интерфейс, оптический интерфейс и т. д.) и многочисленные другие элементы и функциональные возможности.
Компьютерный процессор(-ы) 602 может представлять собой интегральную схему для обработки инструкций. Например, компьютерный процессор(-ы) может представлять собой одно или более ядер или микроядер процессора. Вычислительная система 600 может также включать в себя одно или более устройств 610 ввода, таких как сенсорный экран, клавиатура, мышь, микрофон, сенсорная панель, электронная ручка или любой другой тип устройства ввода.
Интерфейс 612 связи может включать в себя интегральную схему для подключения вычислительной системы 600 к сети (не показана) (например, локальной сети (LAN), глобальной сети (WAN), такой как Интернет, мобильной сети или любому другому типу сети) и/или другому устройству, такому как другое вычислительное устройство.
Кроме того, вычислительная система 600 может включать в себя одно или более устройств 607 вывода, таких как экран (например, жидкокристаллический (ЖК) дисплей, плазменный дисплей, сенсорный экран, монитор с электронно-лучевой трубкой (ЭЛТ), проектор или другое устройство-дисплей), принтер, внешнее хранилище или любое другое устройство вывода. Одно или более устройств вывода могут быть такими же или отличными от устройства (устройств) ввода. Устройство(-а) ввода и вывода могут быть локально или удаленно подключены к компьютерному процессору(-ам) 602, устройству 604 непостоянного хранения и устройству 606 постоянного хранения. Существуют многие различные типы вычислительных систем, и вышеупомянутое устройство(-а) ввода и вывода может принимать другие формы.
Инструкции программного обеспечения в форме машиночитаемого программного кода для выполнения вариантов осуществления изобретения могут храниться, полностью или частично, временно или постоянно, на постоянном машиночитаемом носителе, таком как CD, DVD, устройство хранения, дискета, лента, флэш-память, физическая память или любой другой машиночитаемый носитель. В частности, инструкции программного обеспечения могут соответствовать машиночитаемому программному коду, который, при его выполнении процессором(-ами), выполняется с возможностью осуществления одного или более вариантов осуществления изобретения.
Вычислительная система 600 на ФИГ. 4a может подключаться или являться частью сети. Например, как показано на ФИГ. 4b, сеть 620 может включать в себя множество узлов (например, узел X 622, узел Y 624). Каждый узел может соответствовать вычислительной системе, такой как вычислительная система, показанная на ФИГ. 4a, или группа комбинированных узлов может соответствовать вычислительной системе, показанной на ФИГ. 4a. В качестве примера варианты осуществления изобретения могут быть реализованы на узле распределенной системы, который подключен к другим узлам. В качестве другого примера варианты осуществления изобретения могут быть реализованы в распределенной вычислительной системе, имеющей множество узлов, при этом каждая часть изобретения может находиться на отдельном узле в распределенной вычислительной системе. Кроме того, один или более элементов вышеупомянутой вычислительной системы 700 могут находиться в удаленном местоположении и подключаться к другим элементам по сети. В одном аспекте настоящее изобретение относится к способу выполнения буровых работ на площадке буровой установки. Способ может включать в себя шаг захвата изображения трубы на площадке буровой установки. Труба может быть выполнена с возможностью вставки в ствол скважины на площадке буровой установки. Способ может включать в себя шаг обнаружения местоположения конца трубы с изображения. Способ может включать в себя шаг расчета диаметра трубы или расчета расстояния между обнаруженным концом трубы и другим элементом.
Способ в соответствии с настоящим изобретением может включать в себя захват изображения, расчет расстояния на основе изображения и использование рассчитанного расстояния для выполнения любой из вышеописанных скважинных работ. Способ может выполняться посредством системы, описанной выше, или посредством любой системы, способной выполнять шаги способа.
Способы и системы по настоящему изобретению могут улучшать работу площадки буровой установки, обеспечивая возможность более точной и эффективной работы площадки буровой установки. Оборудование площадки буровой установки, такое как устройство механизированной подвески и свинчивания/развинчивания труб, может приводиться в действие, когда трубы или другие элементы площадки буровой установки находятся в оптимизированном положении. Способы и системы по настоящему изобретению могут обеспечивать возможность определения того, находятся ли элементы площадки буровой установки в оптимизированном положении, в реальном времени. Способы и системы по настоящему изобретению могут сокращать время и количество персонала, необходимые для выполнения измерений расстояния между элементами площадки буровой установки. Способы и системы по настоящему изобретению могут обеспечивать возможность более точного расчета параметров ствола скважины, таких как нагрузка на крюк, и обеспечивать возможность обновления таких расчетов в реальном времени. Такие расчеты могут повышать эффективность других скважинных работ. Такие расчеты и осуществляемое на основании их результатов командное управление оборудованием буровой установки может предотвращать повреждение компонентов площадки буровой установки, таких как буровое долото, бурильная колонна или верхний привод.
Способы и системы по настоящему изобретению могут также обеспечивать возможность автоматизации работы площадки буровой установки. Устройство визуализации может захватывать изображения элементов площадки буровой установки, процессор может выполнять расчеты на основе изображений, и процессор может затем осуществлять командное управление оборудованием буровой установки на основе расчетов. Эта процедура может выполняться итерационно, без ввода данных человеком-оператором или при вводе меньшего количества данных человеком-оператором, чем требуется в случае с неавтоматизированными площадками буровых установок. Таким образом, автоматизация может снизить затраты на эксплуатацию площадки буровой установки, возможность возникновения ошибки, связанной с человеческим фактором, в ходе буровых работ, и количество людей-операторов, подверженных потенциально опасным условиям.
Хотя раскрытие изобретения включает в себя ограниченное число вариантов осуществления, специалистам в данной области техники, ознакомленных с преимуществами данного изобретения, будет понятно, что могут быть выведены другие варианты осуществления без отхода от объема настоящего изобретения. Соответственно, объем должен ограничиваться только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УМЕНЬШЕНИЯ ШУМА БУРОВОЙ УСТАНОВКИ, ПЕРЕДАВАЕМОГО В СКВАЖИНУ | 2016 |
|
RU2728744C2 |
| ХАРАКТЕРИЗУЮЩИЕ ОТКЛИКИ В БУРОВОЙ СИСТЕМЕ | 2016 |
|
RU2721203C2 |
| БЛОК ПОДШИПНИКОВ И УЗЕЛ ТРАНСМИССИИ БУРОВОГО ИНСТРУМЕНТА | 2014 |
|
RU2674349C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ БУРОВОГО ДОЛОТА ДО ЗАБОЯ СКВАЖИНЫ | 2015 |
|
RU2673244C1 |
| КЛАССИФИКАЦИЯ РАСПРЕДЕЛЕНИЯ ЧАСТИЦ ПО РАЗМЕРУ И ФОРМЕ В БУРОВЫХ РАСТВОРАХ | 2015 |
|
RU2672075C1 |
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| ОБНАРУЖЕНИЕ ПРИТОКА ГАЗА В СТВОЛЕ СКВАЖИНЫ | 2012 |
|
RU2570211C2 |
| БУРОВАЯ УСТАНОВКА С ЗАКРЫТОЙ НАМОТАННОЙ ТРУБОЙ | 2008 |
|
RU2471059C2 |
| СКВАЖИННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ТЕЛЕМЕТРИЧЕСКИЙ ПРИЕМНИК | 2016 |
|
RU2695434C1 |
| НАПРАВЛЯЮЩИЙ БЛОК ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ (ВАРИАНТЫ) И СПОСОБ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ НАПРАВЛЯЮЩЕГО БЛОКА | 2020 |
|
RU2813617C2 |
Буровая установка используется в распространенных способах и системах бурения, используемых при бурении скважин для добычи нефти и других углеводородов. Техническим результатом является повышение эффективности буровых работ. Площадка буровой установки содержит: по меньшей мере одну трубу, выполненную с возможностью вставки в ствол скважины на буровой установке; по меньшей мере одно устройство визуализации, выполненное с возможностью обнаружения местоположения конца по меньшей мере одной трубы или признака по меньшей мере одной трубы; и процессор, принимающий входные данные от по меньшей мере одного устройства визуализации и выполненный с возможностью расчета расстояния между концом по меньшей мере одной трубы и вторым концом по меньшей мере одной трубы, причем процессор выполнен с возможностью определения нагрузки на крюк на основе рассчитанного расстояния. 2 н. и 9 з.п. ф-лы, 4 ил.
1. Площадка буровой установки, содержащая:
по меньшей мере одну трубу, выполненную с возможностью вставки в ствол скважины на буровой установке;
по меньшей мере одно устройство визуализации, выполненное с возможностью обнаружения местоположения конца по меньшей мере одной трубы или признака по меньшей мере одной трубы; и
процессор, принимающий входные данные от по меньшей мере одного устройства визуализации и выполненный с возможностью расчета расстояния между концом по меньшей мере одной трубы и вторым концом по меньшей мере одной трубы, причем процессор выполнен с возможностью определения нагрузки на крюк на основе рассчитанного расстояния.
2. Площадка по п. 1, отличающаяся тем, что устройство визуализации представляет собой камеру, видеокамеру, устройство ультразвуковой визуализации, устройство электромагнитной визуализации, устройство тепловой визуализации, лазерный дальномер или устройство триангуляции.
3. Площадка по п. 1, отличающаяся тем, что устройство визуализации выполнено с возможностью захвата множества изображений с течением времени, и тем, что процессор выполнен с возможностью расчета нагрузки на крюк по меньшей мере одной трубы на основе каждого изображения.
4. Площадка по п. 1, отличающаяся тем, что процессор подключен к одной или больше системам управления, выполненной с возможностью управления работой устройства для механизированной подвески и свинчивания/развинчивания труб, верхнего привода, лебедки или роторного стола для приведения по меньшей мере одной трубы в движение на основе расчета.
5. Способ выполнения буровых работ на площадке буровой установки, включающий в себя:
захват изображения трубы на площадке буровой установки, при этом труба выполнена с возможностью вставки в ствол скважины на площадке буровой установки;
обнаружение местоположения конца трубы или характерного признака трубы с изображения; и
расчет расстояния между обнаруженным концом трубы и вторым концом трубы;
прикрепление трубы к приводному устройству, причем рассчитанное расстояние содержит первую длину трубы, прикрепленной к приводному устройству;
соединение трубы со второй трубой, удерживаемой в фиксированном положении в стволе скважины клиновым захватом для обсадных труб;
высвобождение второй трубы из клинового захвата для обсадных труб;
повторный захват изображения трубы, прикрепленной к приводному устройству, после ее прикрепления ко второй трубе и после высвобождения второй трубы;
определение второй длины трубы с повторно захваченного изображения;
определение изменения между первой длиной и второй длиной трубы; и
расчет нагрузки на крюк скважинной системы на основе изменения длины трубы.
6. Способ по п. 5, в котором приводное устройство представляет собой привод ведущей трубы или верхний привод.
7. Способ по п. 5, дополнительно включающий в себя:
расчет общей длины бурильной колонны, включающей в себя первую трубу и вторую трубу;
определение пробуренной глубины на основе рассчитанной общей длины; и
заканчивание ствола скважины в секции коллектора на основе определенной пробуренной глубины.
8. Способ по п. 5, дополнительно включающий в себя определение свойства резьбы трубы.
9. Способ по п. 5, дополнительно включающий в себя захват последовательных изображений трубы с течением времени, обнаруживая изменения в трубе по этим последовательным изображениям.
10. Способ по п. 9, дополнительно включающий в себя обнаружение вибрации в трубе на основе последовательных изображений и регулировку крутящего момента и/или частоты вращения трубы на основе обнаруженной вибрации.
11. Способ по п. 9, дополнительно включающий в себя определение исходя из последовательных изображений частоты вращения, с которой перемещается труба.
| US 20140233804 A1, 21.08.2014 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЬЕМНЫХ ОПЕРАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324812C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ И ИХ ИДЕНТИФИКАЦИИ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2015 |
|
RU2593609C1 |
| US 20130271576 A1, 17.10.2013. | |||

