Йзобретеййе относится к специаль- ным работам в строительстве и может быть использовано для исследования и изменения свойств грунтов в скважине различными методами, для закладки различных элементов в стенку скважины и т.д.
Известно устройство для ввода рабочего органа ( элементов) в стенку скважины, содержащее направляющую трубу с многозвенным механизмом, начальное звено которого соединено с рабочим органом, конечное - со штоком реверсивного привода, а звенья снабжены фиксаторами 1.
Недостатке этого устройства является возможность ввода рабочего органа только в слабые грунты, что . . сужает область их применения.
Известно устройство для ввода рабочего органа в стенку скважисш, содержащее направляющую трубу, внут- ри которой расположен многозвенный механизм с фиксатррсил звеньев, рабо- чий орган, соединенный с начальным звенсм, шток реверсивного привода поступательного движения связан с , конечным звеном, привод вращения рабочего органа, узел для введения и
извлечения фиксаторов звеньев много- звенного механизма 2j.
Недостатком известного устройства является сложность механической пе- ; редачи, включащей большое количество звеньев, необходимых для передачи крутящего мсмента от штока при-вода к рабочему органу. Это повышёкет по.Q тери на трение и снижает надежность устройства в эксплуатации.
Целью изобретения является упрощение конструкции и повышение надцеж ,ности.
Достигается поставленная цель тем, что в устройстве для ввода рабочего органа в стенку скважины, со-держащем направляющую трубу, внутри которой расположен .многозвенный механизм с фиксатором звеньев, рабочий
20 орган, соединенный с начальным звеном, шток реверсивного привода поступательного движения связан с конеяным звеном, привод вращения рабочего органа, узел для введения и
25 (Извлечения фиксаторов звеньев Многозвенного механизма, привод вращения рабочего органа установлен в начальном звене многозвенного механизма и. связан с рабочим органом через
30 .шлицевое соединение.
При этом привод вращения рабочего органа выполнен в виде гидроцилиндра с полым поршнем, внутри которого ус-тановлен с возможностью возвратнопоступательного движения золотник с двумя проточками, на наружной поверх|Ности поршня выполнено два параллельных кольцевых винтовых паза, а в стенке гидроцилиндра закреплены два полых пальца, сопряженных с кольцевыми винтовыми пазами, при этом полости пальцев соединены соответст-, венно с нагнетательным и сливным трубопроводами, полости, образуемые проточками золотника, гидравлически связаны с кольцевыми винтовыми пазами и рабочими полостями гидроцилиндра, а полости между торцами золотника и телом поршня гидравлйчес ки связаны с рабочими полостями гид роцилиндра и с кольцевым-шинтовым пазом, соединенным со сливным трубопроводом.
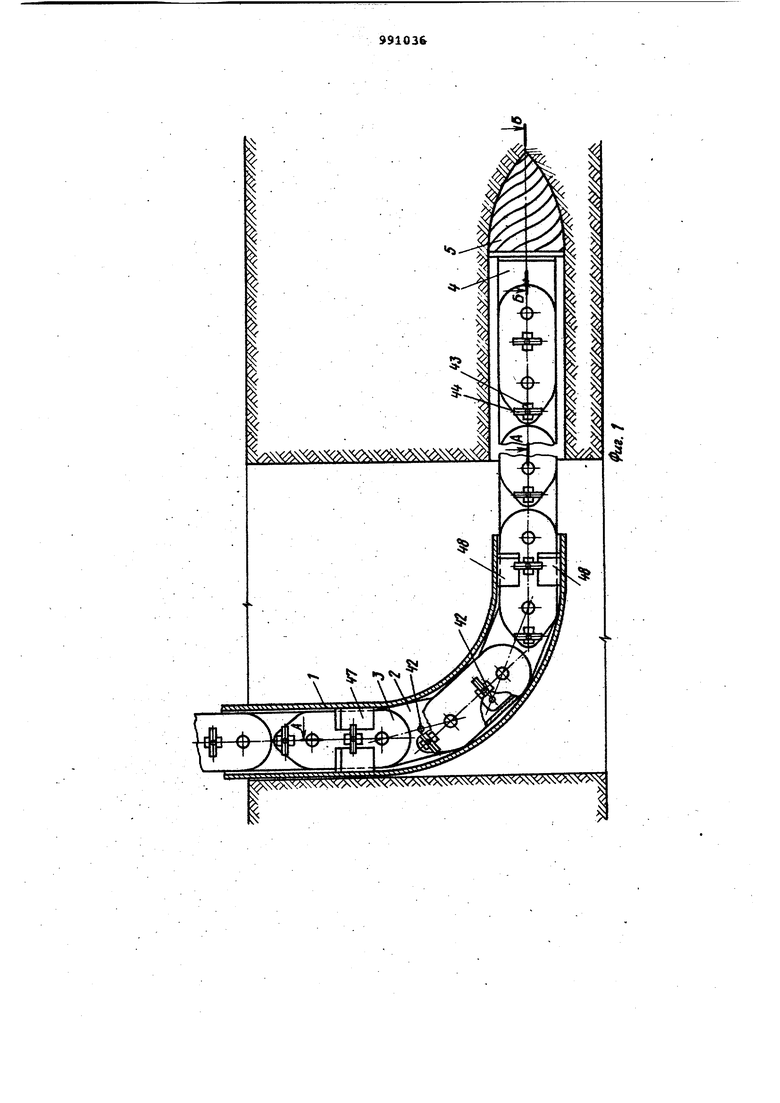
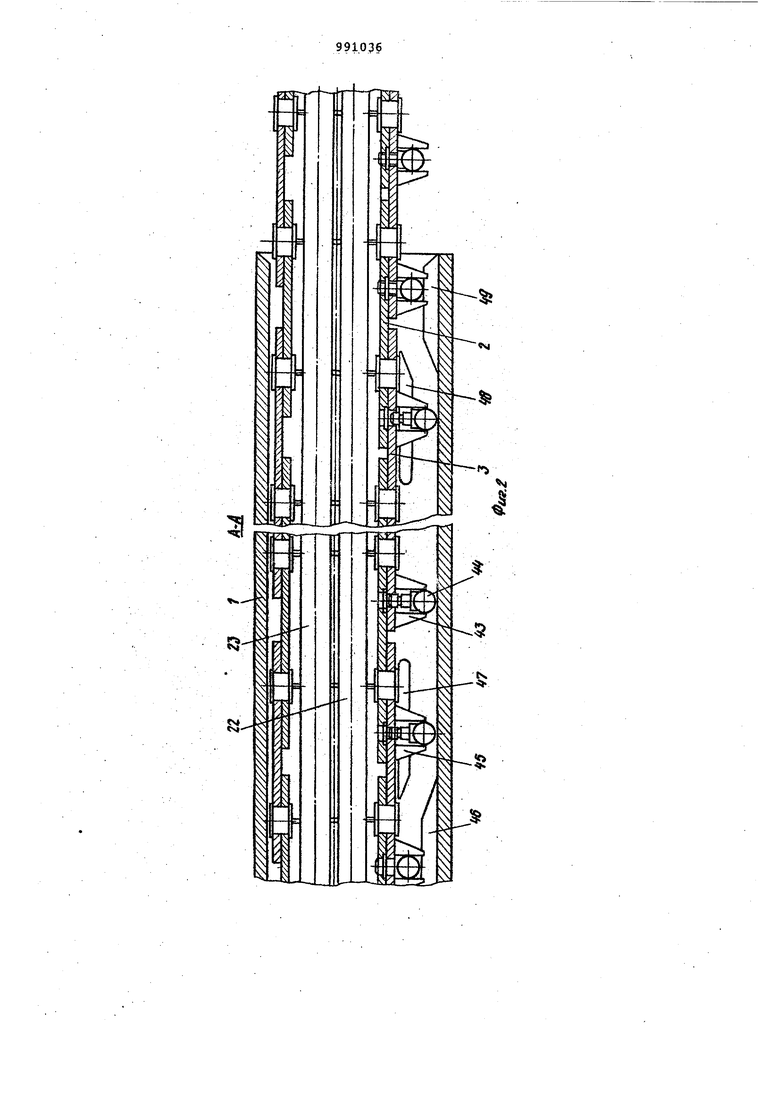
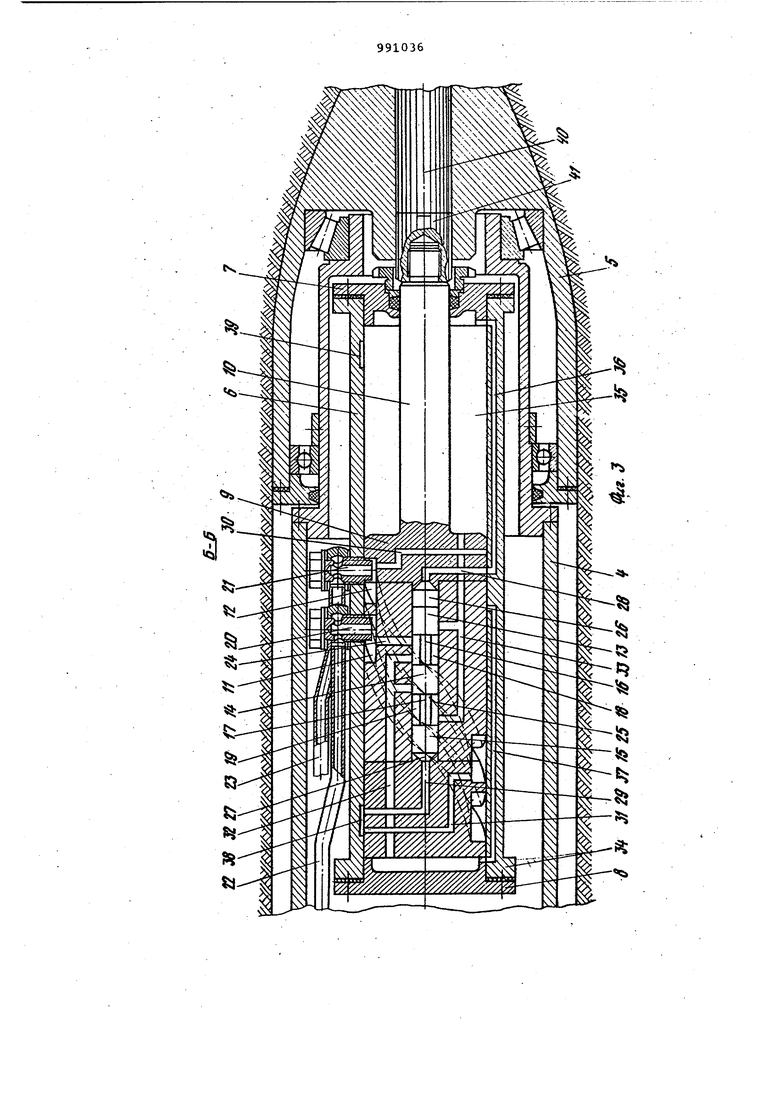
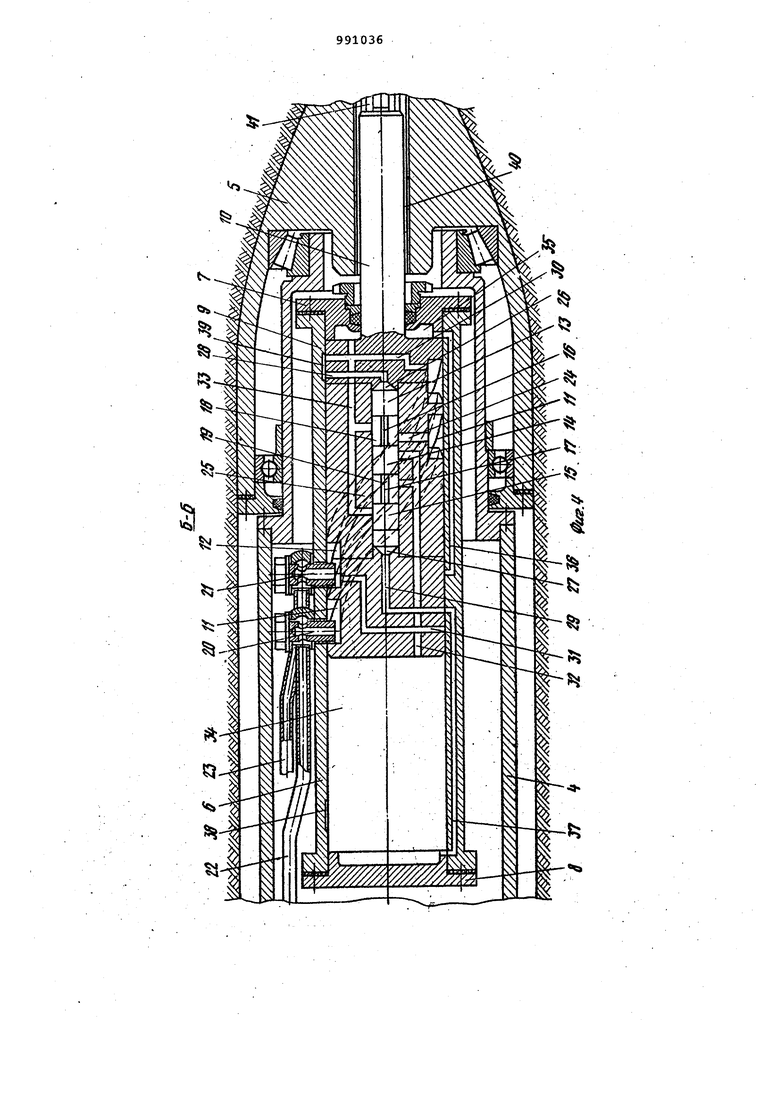
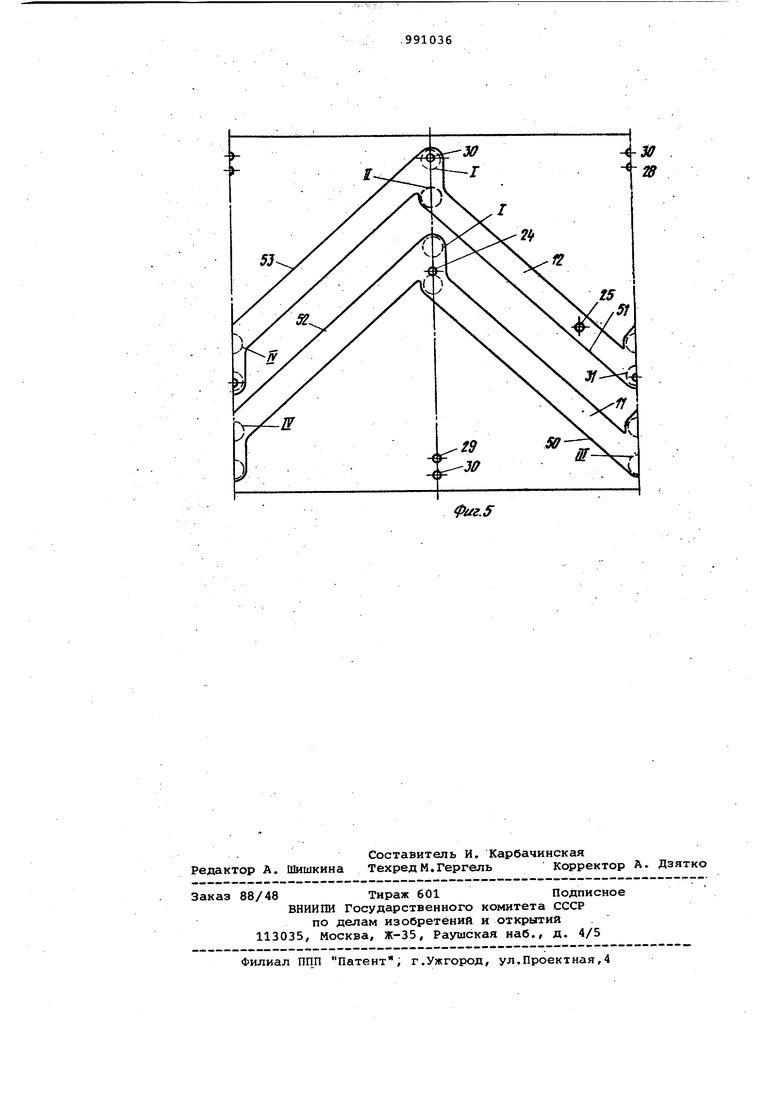
На фиг. 1 приведено предяагае. моеустройство общий вид {боковая стенка направлякадей трубы не показа- на); на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 и 4 - разрез Б-Б на фиг.1 . (при разных положениях поршня гидродвигателя)) на фиг. 5 - развертка пазов, выполненных на цилиндрической поверхности поршня.
Устройство для ввода элементов а стенку скважины состоит из направляв ющей трубы 1, внутри которой распо.-; ложен многозвенный механизм, состоящий из звеньев 2 и 3, а также начального звена 4, шарнирно соединен- ных между собой. На начальном звене 4 закреплен с возможностью вращения рабочий орган 5, йыпсхлненный в виде конического наконечника с винтовой нарезкой. Внутри начального звена 4 установлен привод вращения рабочего органа 5, например гидродвигатель, состоящий из цилинда1а 6, крышек 7 и 8 поршня 9 со штоком 10. Поршень 9 выполнен составным, на его боковой поверхности выполнены два параллельных кольцевых винтовых па- за Ни 12 (фиг. 5). Внутри централ ьной части поршня 9 выполнено осевое отверстие, в которое помещен с возможностью поступательного перемещения золотник. Золотник имеет утолщения 13 -.15 и проточки 16 и 17, образующие полости 18 в 19. В пазы 11 и 12 входят Соответственно полые пальцн 20 и 21. Полость пальца 20-соединена с напорным трубопроводом 22, пЬдклю-i ченным л гидронасосу, а полость пальца 21 - со сливным трубопроводом 23. Полость 18 соединена каналом 24 с пазом 11, а полость 19 - канешом 25 с пазом 12.
По обе стороны золотника выпол- . ненц полости 26 и 27, к которым под-j
ведены соответственно каналы 28 и 29, выходящие на цилиндрическую поверхность поршня 9. Рядом с выходами на цилиндрическую поверхность поршня9 каналов 28 и 29 выполнены 5соответственно каналы 30 и 31,. соединенные с пазом 12. В поршне 9 выполнены каналы 32 и 33 так, что в нахозвдения золотника в крайнем левом положении, канал 32 соедиtO няет полость 34 с полостью 18, а канал 33 - полость 35 с полостью 19. При нахождении золотника в крайнем правом положений канал 32 сс1единяет полость 34 с полостью 19,.а канал 33
15 полость 35 с полостью 18. В цилиндре 6 выполнены каналы 36 и 37 так, : что при нахождении поршня 9 в крайнем левом положении канал 36 соединяет, полость 35 с каналом 28, а при
20 нахождении поршня 9 в крайнем правом положении канал 37 соединяет полость 34 с кайалом 29. На внутренней поверхности цилиндра 6 выполнены выемки 38 и 39 так, что при на-.
25 хождении поршня в крайнем левом по.ложении выемка 38 соединяет каналы 29 и 31, а при нахождении поршня в крайнем правом положении выемка 39 соединяет каналы 28 и 30. В-рабЬчем; органе 5 выполнен шлицевой паз 40, сопряженный со шлицевой головкой 41, жестко соединенной со штоком 10.
Конечное звено многозвенного механизма соединено с реверсивным приводом поступательного движения. В каж дом звене 3 выполнены Два отверстия, соi пряженные с соответствующими отверс-f тйями 42 в звеньях 2. На боковых поверхностях звеньев 3 закреплены упоры 43, между которыми проходя
0 Т-образные фиксаторы 44 с кольцевы ми проточками, входящие в отверстия в звеньях 3. В отверстиях 42 выполнены кольцевые проточки, в которые вставлены пружинные шайбы 45.В верти5 кальной части направляющей трубы 1 до криволинейного участка последовательно установлены клиновидные выступы 46 и.клиновидные бортики 47. В горизонтальном участке направляющей
0 трубы 1 после криволинейного участка последовательно установлены клиновидные бортики 48 и клиновидные выступы 49.
Ввод рабочего органа в стенку скважины при ПОмощи устройства осу адествляется следующим образом.
В исходном положении многозвенный механизм полностью введен в направляю14ух трубу 1, Устройство оп:/скается в скважину на требуемую глубину. Затем включают привод поступательного движения многозвенного механизма, в результате чего звенья 2-4 перемещаются внутри направля5 ющей трубы 1 и рабочий орган 5 упирается в стенку скважины. После это включают гидронасос и рабочая жидкость по напорному трубопроводу 22 и полому пальцу 20 нагнетается в -па 11 поршня 9, находящегося в крайнем левом положении (фиг. ЗЛ. Пальцы 20 и 21 при этом находятся в крайнем положении (фиг,- 5. Из паза 11 рабо чая жидкость по каналу 24 попадает в полость 18, Поскольку золотник в это .время находится в крайнем левом положении, рабочая жидкость из полости 18 через канал 32 нагнетается :в полость 34. В результате этого поршень 9 перемещается внутри цилиндра 6 вправо, а .рабочая жидкость находящаяся в полости 35 цилиндра 6 ,через канал 33, полость 19, канал 25, паз 12 и полый палец 21 вытесни ется поршнем 9 всливной трубопровод 23. , - При поступательном движении порш ня 9 пальцы 20 и 21 перемещаются относительно него из положения 1 в положение II (фиг. 5;. Затем пальцы 20тд. 21 упираются соответственно в стенки 50 и 51 Пазов 11 и 12, выполненных по.винтовой линии. Поскол ку угол наклона выполненных параллельных пазов 11 и 12 больше угла трения, то при дсшьнейшем движении поршня 9 пальцы 20 и 21 перемещаются по пазам 11 и 12 до положения М, соответствующего- крайнему правому положению поршня 9 (фиг. 4. Так как пальцы 20 и 21 неподвижны относительно цилиндра б, то при перемещении относительно них поршня 9, по ледний поворачивается вокруг собственной оси. При движении поршня 9 из одной крайней точки в другую он поворачивается на 180, Когда повшень 9.доходит до крайней правой точки, канал 29 совмещается с каналом 37, а канал 28 черезвыемку 39 соединяется с каналом 30. В результате этого рабочая жидкость из полости 34 по каналам 37 и 29 нагнета ся в полость 26 и перемещает .золотник вправо. При этом рабочая жидкость из полости 26 через канал 28, выемку 39, канал 30, паз 12 и полый палец 21 выдавливается в сливной тр бопровод 23. После перемещения золотника в крайнее правое положение рабочая жидкость, нагнетаемая в полость 18, поступает в ОткрывииШся канал 33 и из него - в полость 35. При этом по шень 9 перемещается влево и вытесняет рабочую жидкость из полости34 через канал 32, полость 19, канал 25f паз 12 и полый палец 21 в сливной трубопровод 23. При поступатель ном движении поршня 9 пальцы 20 и 21перемещаются относительно него . 1из положения Ш в положение 1У Сфиг. Затем они упираются соответственно в стенки 52 и 53 пазов 11 и 12, выполт ненных по винтовой линии, и перемещаются по ним.: При совершении хода влево поршень 9, перемещаясь относительно неподвижных пальцев 20 и 21, поворачивается еще на 180°. Когда поршень 9 доходит до крайней левой точки, канал 28 совмещается с каналом 36, а канал 29 через выемку 38 соединяется с каналом 31. В результате этого рабочая жидкость из полости 35 по каналам 36 и 28 нагнетается в полость 26 и перемещает золотник влево. При этом рабочая жидкость из полости 27 через анал 29, выемку 38, канал 31, паз аЗ и полый палец 21 выдавливается .в сливной трубопровод 23. После перемещения золотника .в крайнее левое положение рабочая жидкость, нагнетаемая в полость 18, поступает в открывийся канал 32 и из него - в полость 34. Дальнейшие перемещения поршня 9 и золотника .происгходят по описанной схеме. Таким образом, поршень 9 совершает возвратно-поступательное и одновременно вращательное движение. В это время жестко соединенная со штоком 10 поршня 9 шлицевая головка 41 перемещается возвратно-постуда-. тельно относительно шлицеёого паза 40 рабочего органа 5, который вращается при этом вокруг собственной оси и ввинчивается своей наружной винтовой нарезкой в грунт. В результате приложения осевой нагрузки к многозвенному механизму и ввинчивания рабочего органа 5 в грунт, многозвенный механизм перемещается ; внутри направляющей трубы 1. При подъеме звеньев 3 к криволинейному участку направляющей трубы 1 клиновидные бортики 47,попадая в зазор между Т-образными фиксаторами 44 и стенками звеньев 3, извлекают фиксаторы 44 из отверстий 42. После прохождения звеньями 2 и 3 криволинейного участка направляющей трубы 1 соосность фиксаторов 44 и отверстий 42 восстанавливается и фиксаторы 44 вдавливаются клиновидными выступами 49 в отверстия 42, Таким образом, рабочий орган 5, вращаясь, вдавливается в грунт через стенку скважины. После ввода рабочего органа 5 на .требуемую глубину в стенку скважины привод вращения (гидродвигательд отк.лючают, а привод поступательного движения включают в противоположном направлении. В результате этого многозвенный механизм извлекается из стенки скважины. При пОдходе звеньев 3 к криволинейному
участку направл кхцей трубы 1 со сторонЫ горизонтального участка клиновидные бортики 48, попадая в зазор между Т-образными фиксаторами 44 и стенкали звеньев 3, извлекают фиксаторы 44 из отверстий 42. После этого звенья 2 л 3 теряют жесткое соединение между собой и последовательно проходят криволинейный участок направляющей трубы 1. При этом йарушается соосность отверстий 42 и фиксаторов 44. После прохождения звеньями 2 дЗ криволинейного участка многозвенный механизм распрямляется/ отверстия 42 и фиксаторы 44 располагаются соосно, после чего клиновидные выступн 46 вдавливают. Фиксаторы 44 в отверстия 42. После ввода всех звеньев мносозвенного механизма в направляющую трубу, устройство извлекают из скважины.
Таким образом, предлагаемое устройство конструктивно проще, имеет больший коэффициент передачи усилия за счет уменьшения потерь на трение, что повышает его эффективность.
Формула Изобретения
1. Устройство для ввода рабочего органа в стенку сквё1жины, содержащее направляющую трубу, внутри которой расположен многозвенный механизм.с фиксатором звеньев, рабочий орган, соединенный с начальным звеном, шток реверсивного привода поступательного движения связан с конечным звеном, а привод вращения рабо-; чего органа, узел для введения и извлечения фиксаторов звеньев много-
эвенного механизма, отличающееся тем, что, и целью упрощения конструкции и повышения надежности, привод вращения рабочего органа установлен в начальном зве5не многозвенного.механизма и связан с рабочим органом через шлицёвое соединение.
2. Устройство по п. If отличающееся тем, что привод
0 вращения рабочего органа выполнен в виде гидроцилиндра с полым поршнем, внутри которого установлен с возможностью возвратно-поступательного движения золотник с двумя про5 точками, на наружной поверхности поршня выполнено два паргшлельных кольцевых винтовых паза, а в стенке гидроцилиндра закреплены два nomix пальца, сопряженных с кольцеQ выми винтовыми пазами,при этом полости пальц ев соединены COOTBCSTCTвенно с нагнетательным и сливным трубопроводами, полости, образуемые проточками золотника, гидравлически
связаны с кольцевыми винтовыми пазами и рабочими полостями ГИДЕЮЦИлиндра, а полости между торцами золотника и телом поршня гидравлически связаны с рабочими полостями гидро;цилиндра и с кольцевым винтовым пазом, соединенным со сливным трубопроводом., . Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР 678906, кл. В 21 В 47/00,-1977.
2. Авторское свидетельство СССР по заявке 2883233/03, кл.Е 21 В 47/00, 1980.
--5г
«VJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для закладки лучевых дрен | 1980 |
|
SU1038420A1 |
| Устройство для ввода элементов в стенку скважины | 1980 |
|
SU876976A1 |
| Устройство для образования криволинейных скважин | 1984 |
|
SU1270213A1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| Пресс для сеносоломистых материалов | 1986 |
|
SU1404023A1 |
| Клапан перепускной управляемый | 2020 |
|
RU2730156C1 |
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ПРИЗАБОЙНУЮ ЗОНУ СКВАЖИН | 1999 |
|
RU2175719C2 |
| Гидравлический перфоратор | 2017 |
|
RU2656062C1 |
| ГИДРАВЛИЧЕСКИЙ ЗОНДОВЫЙ ПЕРФОРАТОР | 2013 |
|
RU2550709C2 |
| Пресс для сеносоломистых материалов | 1987 |
|
SU1456052A1 |