(5) АКУСТИЧЕСКИЙ ЛОКАТОР ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический локатор | 1981 |
|
SU991345A1 |
| Устройство для измерения вектора скорости ветра | 1980 |
|
SU918922A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| Способ и устройство обработки векторных радиосигналов в полнополяризационных радиолокационных станциях | 2019 |
|
RU2695077C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2310992C2 |
| СПОСОБ МНОГОКАНАЛЬНОГО АДАПТИВНОГО ПРИЕМА РАДИОСИГНАЛОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2477551C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ АТМОСФЕРЫ | 2005 |
|
RU2293354C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
1
Изобретение относится к метеорологии и может использоваться для измерения скорости ветра в атмосфере.
По основному авт. св. № известен акустический локатор для измерения скорости ветра, содержащий последовательно соединенные задающий генератор, усилитель мощности, переключатель прием-передача с антенной, усилитель, полосовой фильтр, аналого-цифровой преобразователь и два параллельных канала (в составе первого - последовательно соединенные умножитель и.сумматор, причем два входа умножителя соединены с выходом аналого-цифрового преобразователя, в составе второго - последовательно соединенные линия задержки, дополнительные умножитель и сумматор, причем вход линии задержки и второй вход умножителя соединены с выходом аналого-цифрового преобразователя , выходы сумматоров обоих
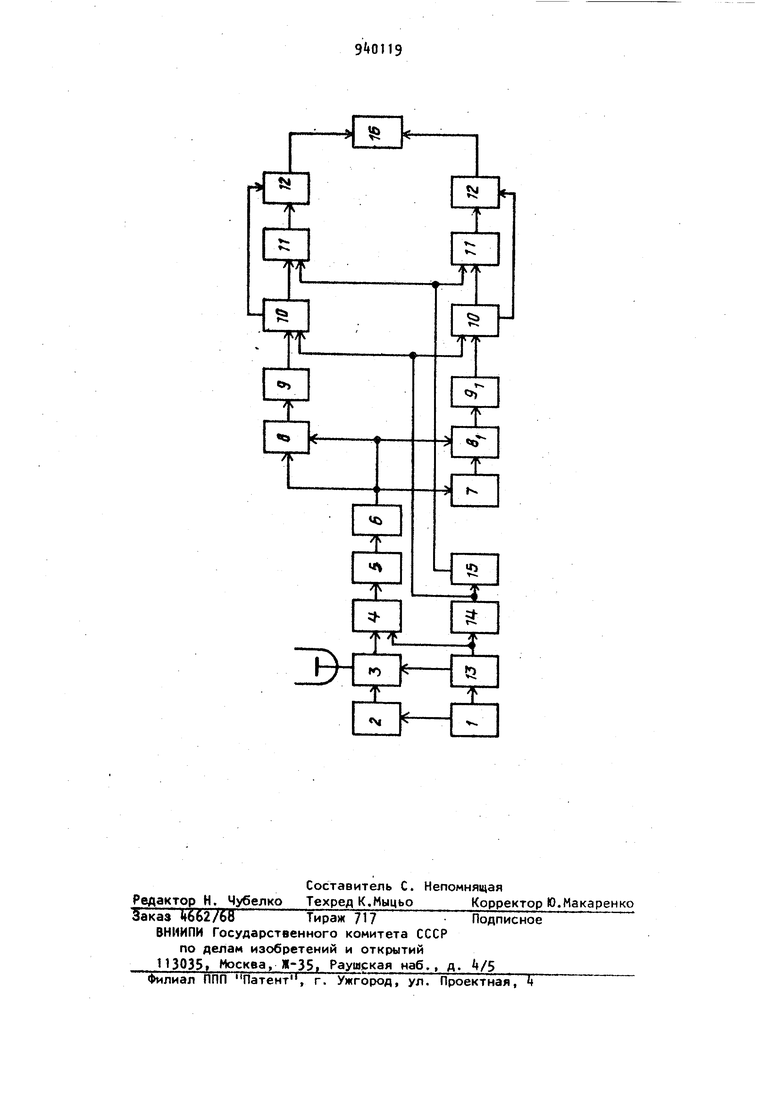
каналов соединены с электронно-вычислительной машиной), а также синхронизатор, соединенный с задающим генератором, переключателем приемпередача и усилителем р.
Недостатком известного локатора является то, что при наличии шумов, как внешних акустических, так и внутренних электрических, измерение скорости ветра сопровождается системаtoтическими ошибками. Это происходит вследствие неверного определения значений корреляционной функции, а именно, среднее измеренное значение корреляционной функцииf%(т) склады-15вается из истинного сигнального значения (С) и шумовой составляющей и при низких отношениях сигнал/шум это смешение значительно, что приводит к наличию ошибки при определе20нии скорости ветра. .Вышеуказанное относится в первую очередь к измерению }Ь (0) , что объясняется физической природой окружающего локатор шу39ма, а именно, энергетический спектр шума при обычно применяемых полосах входного фильтра (50-200 Гц) является примерно постоянным, т.е. близок к белому шуму. Как известно,- в этом случае значения корреляционной функции группируются вблизи малых oLf с максимумом при t 6, . в этой точке наблюдается наибольший вклад шума в корреляционную функцию исследуемого сигнала. В конечном итоге при измерениях это приводит к уменьшенному значению У относительно истинной скорости ветра. ,. Цель изобретения - повышение точности измерения скорости ветра ь атмосфере. Указанная цель достигается тем, что акустический локатор, содержащий последовательно соединенные задающий генератор, усилитель мощности, переключатель прием-передача с антенной, усилитель, полосовой фильтр, аналого-цифровой преобразователь и два параллельных канала (в составе первого - последовательно соединенные умножитель и сумматор, причем два входа умножителя соединены с выходом аналого-цифрового преобразователя, в составе второго - последовательно соединенные линии задержки, дополнительные умножитель и сумматор, причем вход линии задэржки и второй вход умножителя соединены с выходом аналого-цифрового преобразователя), а также электронно-вычислительную машину и. синхронизатор, соединенный с задающим генератором, переключателем прием-передача, усиЖзтелем, снабжен подключенным к выхо ду синхронизатора счетным триггером и связанным с его выходом формирователем, а также двумя цепочками, состоящими ИЗкоммутатора, блока памяти и блока вычитания, включенными одна --между основным сумматором и электронно-вычислительной машиной, а другая - между дополнительным сумматором и электронно-вычислительной машиной, при этом выход счетного три гера подключен к входам коммутаторов связанных выходами с входом блока вычитания, а выход формирователя под ключен к входам блоков памяти. На чертеже представлена блок-схема предлагаемого акустического локатора. 94 Локатор содержит задающий звуковой генератор 1, усилитель 2 мощности, переключатель 3 прием-передача с антенной, антенный усилитель, полосовой фильтр 5, аналого-цифровой преобразователь 6 (АЦП), линию 7 задержки, умножитель 8, дополнительный умножитель 8 , сумматор 9, дополнительный сумматор 9 , коммутатор 10, блок 11 памяти, блок 12 вычитания, синхронизатор 13, счетный триггер It, формирователь 15 признака записьсчитывание, электронно-вычислительную машину 16. Работа устройства осуществляется в два этапа. На первом этапе производится измерение только окружающего локатор шума, а именно, определяются значения шумовых составляющих р, (о) и и дальнейшим занесением этих отсчетов в соответствующую каналу память устройства. При этом на задающий генератор 1 с синхронизатора 13 поступает импульс запрета и передающий тракт локатора отключается, т.е. производится только прием окружающих локатор акустических шумов. В это время коммутаторы 10 обоих параллельных каналов, управляемые счетным триггером И и синхронизатором 13, подключают внутри каналов выходы сумматоров 9 и 9 к входам блоком 11 памяти. При этом акустические шума принимаются антенной, преобразуются -в электрические колебания и через переключатель 3 прием-передача, также управляемый синхронизатором 13, поступают на усилитель 4, где усиливаются и после прохождения полосового фильтра 5 кодируются в аналого-цифровом преобразователе 6 в дискретные моменты времени с интервалом дискретизации f.t l/Ci-fj,,,, где fy,j - частота зондирования (см. описание работы второго этапа). Затем закодированные отчеты шума ) поступают на входы двух каналов. В первом канале на выходе сумматора 9 накапливается среднее N сумм произведений вида Х|(пм) X(nbt), т.е. определяется (О). Во втором канале на вход дополнительногоумножителя 8/J с помощью линии 7 задержки (регистра сдвига) поступают пары вида Xyj,(n&t, Х(п-13л :К поэтому на выходе дополнительного сумматора 5 9 этого канала накапливается среднее (N-I) таких сумм, т.е. опреде ляется Ji(ut). Далее значения ру„(0 и .(ut) через коммутаторы 10 посту пают в соответствующие каналам бло ки 11 памяти, управляемые по вторым входам формирователем 15 признака запись-считывание (логическим Устройством, определяющим режим работы устройства памяти: запись, счи тывание, хранение и формирующим импульсы обращения к памяти). На втором этапе работы локатора (этапе зондирования) коммутаторы 10 подключают выходы сумматоров 9 и 9: к входам блоков 12 вычитания, а на задающий генератор 1 с синхронизатора 13 поступает импульс запуска. Генератор 1 генерирует электрические колебания нужной частоты, которые усиливаются усилителем 2 мощнос и через переключатель 3 прием-пере дача поступают в антенну, где они преобразуются в акустические колеба ния и излучаются. Далее отраженный от неоднородностей атмосферы акустический сигнал вместе с окружающими шумами принимается антенной, преобразуется в электрический и чер переключатель 3 прием-передача поступает на усилитель , усиливает ся и после прохождения.полосового фильтра 5-кодируется в аналого-цифровом преобразователе 6 в дискретные моменты времени с интервалом дискретизации ,ff,. Затем закодированные отсчеты смеси сигнала и шума X(ri6t) поступают на входы двух параллельных каналов. о в первом канале на выходе сумматора 9 .накапливается среднее N сумм произведений вида 4k(n&t)X(nut) , т.е определяется корреляционная функция смеси сигнала и шума при , т.е. |Ь(0). Во втором же канале на выходе сумматора накапливается среднее (N-1) сумм, т.е. определяется p(ut) Далее значения )(0(. р (&t) смеси сигнала и шума через соответствующие каналам коммутаторы 10 поступают на входы блоков 12 вычитания. Одновременно с формирователя 15 признака запись-считывание 15. управляемого синхронизатором 13 и счетным триггером }k, на вторые входы блоков 17 памяти 11 поступает команда Считывание и происходит считывание ранее определенных первом этапе 19 работы локатора значений корреляционной функции шума ,(0) и „(At) из блоков 11 памяти на втором входе блоков 12 вычитания соответствующих каналов, где определяются разности значений корреляционных функций сме си сигнала и шума, и просто шума, т.н. R(o)-(i(o) -(оув первом канале и R(ut) p(&t)-j,(ut) во втором. Далее значения R(0) и R(it) поступают в электронно-вычислительную машину 16, где по формулам рассчитывается допплеровский сдвиг и скорость ветра в разрешаемом объеме атмосферы. Таким образом, в предлагаемом локаторе, в отличие от прототипа, скорость ветра определяется по измеренной разности корреляционной функции смеси сигнала шума, полученной при непосредственном зондировании атмосферы, и корреляционной функции отдельно принятого шума. Л так как средние статистические характеристики акустического шума достаточно стабильны, по крайней мере за время одного цикла измерений не более 6с), то это позволяет утверждать о компенсации его влияния на измерение указанных выше двух точек корреляционной функции , а следовательно, и об увеличении точности измерения скорости ветра за счет уменьшения системати-.. ческих ошибок измерений. Формула изобретения Акустический локатор для измерения скорости ветра по авт. св. № I отличающийсл тем, что, с цеЛью повышения точности, он снабжен подключенным к выходу синхронизатора счетным триггером и связанным с его выходом формирователем, а также двумя цепочками, состоящими из коммутатора, блока памяти, и блока вычитания, включенными одна - между электронно-вычислительной машиной и основным сумматором, а другая - между дополнительным сумматором и злектронно-вычислительлой машиной, при этом выход счетного триггера подключен к входам коммута торов, связанных выходами с входом лока вычитания, а выход формироватея подключен к входам блоком памяти. Источники информации, принятые во внимание при экспер изе 1, Авторское свидетельство СССР , кл. G 01 W 1/00, tf.,i0.79.
