Изобретение относится к модулирующим устройствам и вычислительньм средствам, а именно к тренажерам подгютовки операторов локационных станций.
Известен тренажер, предназначенный для подготовки операторов, в котором для получения маневра имитируемого объекта и носителя локационной станции требуется непрерывное участие инструктора для изменения вводимых в вычислительное.устройство входных параметров курса и скорости объекта, а .также носителя.
Физические возможности инструктора щозволяют производить маневр одновременно только по одному из входных паргилетров, что не позволяет имитировать маневры объекта и носителя близко к реальным условиям. Кроме того, вычислительное устройство состоит из дорогостоящих и трудоемких электромеханических узлов.
Известен также тренажер, в кото-, ром динамика движения объекта и носителя заранее известна инструктору .изапйсаГна в памяти тренажера 21 ,
Однако такие тренажеры имеют большой.;н евостаток: они не управляемы в процессе тренировки, следовательно, инструктор не может вмешиваться в обучение - изменить его темп, упростить или усложнить задачу.
Наиболее близк11М к изобретению является тренажер, содержащий пульты инструктора и оператора, индикатор, вычислительное устройство, выходы имитаций обстановки которого подклю10чены к входам пульта оператора, а первая группа входов - к выходам на- . чальных условий пульта инструкторар.
Известному устройству присущи
15 недостатки тренажера, не имеющего памяти траекторий движения объекта. Ввод параметров в вычислительное устройство производится с пульта инструктора в начале тренировки.
20
Целью изобретения является расширение дидактических возможностей
тренажер путем имитации сложных маневров объекта и носителя.
Поставленная цель достигается
25 тем, что в тренажер, содержащий последовательно соединенные пульт преподавателя, преобразователь кординат, пульт оператора и индикатор,
введены четыре формирователя кодов, ,
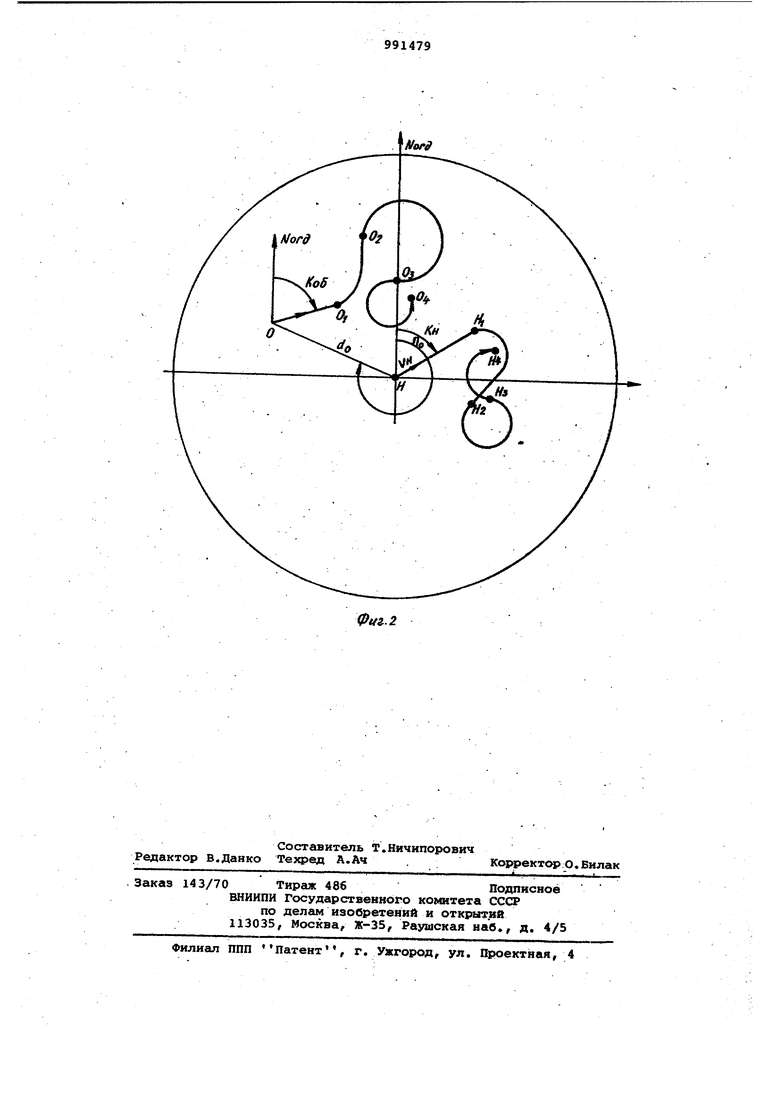
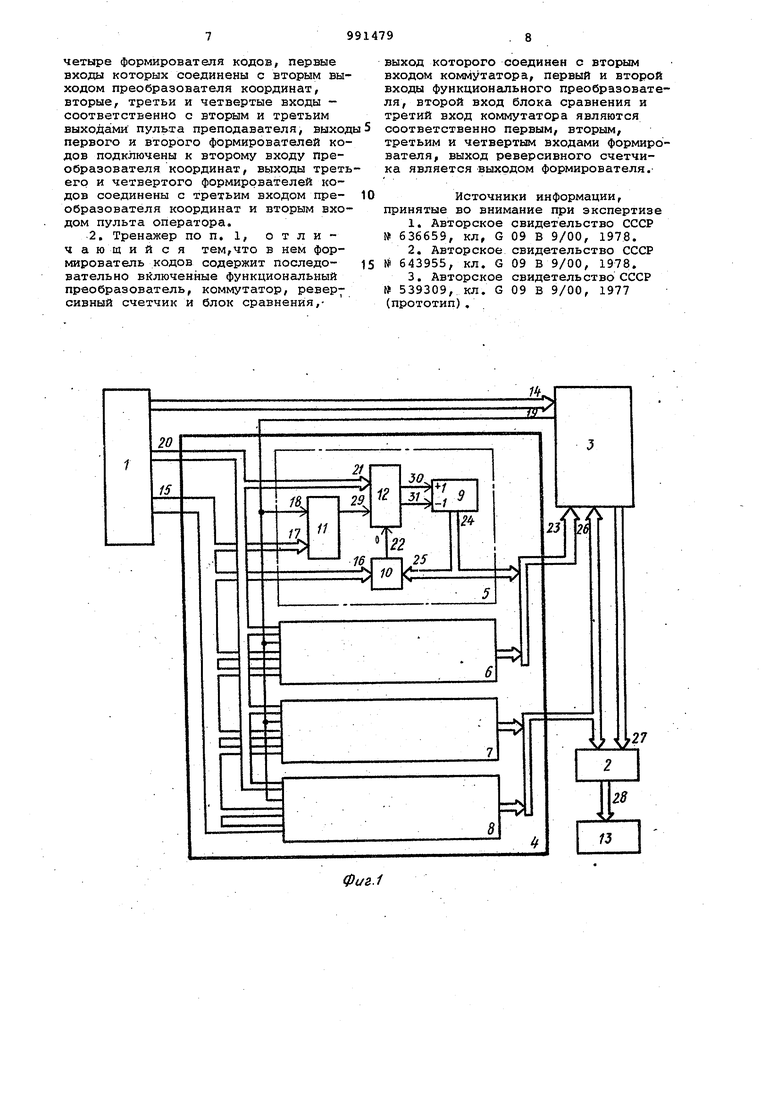
30 первые входы которых соединены с вторым выходом преобразователя коор динат, вторые, третьи и четвертые входы - соответственно с вторым и третьим выходами пульта преподавателя, выходы первого и второго формирователей кодов подключены к второму входу преобраэовател.я координа выходы третьего и четвёртого формирователей кодов соединены с третьим входом преобразователя координат и вторым входом пульта оператора. При этом формирователь кодов содержит последовательно включенные функциональный преобразователь, рев сивный счетчик и блок сравнения, вы ход которого соединен с вторым входом коммутатора,первый и второй вх ды функционального преобразователя, второй вход блока сравнения и третий вход коммутатора.являются соответственно первым, вторым, третьим и четвертым входами формирователя, выход реверсивного счетчика является выходом формирователя. На фиг. 1 изображена блок-схема тренажера; на фиг, 2 - траек торий движения объекта и носителя относительно условной географической точки. Тренажер оператора локационных систем содержит пульт 1 преподавателя для набора параметров движения объекта и носителя в виде цифровых кодов, пульт 2 оператора для слежения и выдачи координат объекта отно сительно носителя, а также для вычисления текущих координат: носителя относительно .центра экрана -встроенного в данный пуль-р панорамного индикатора, преобразователь 3 координат для вычисления текущих координат и иммитации параметров движения объекта относительно носителя,сгла живающий блок 4, состоящий из первой пары формирователей 5 и б кодов следящих систем для сглаживания вво димых параметров объекта и второй пары формиронйтелей 7 иг. 8 кодов сл дящих систем для сглаживания вводимых параметров носителя. В состав каждого формирователя в дит реверсивный счетчик 9, блок 10 сравнивания, функциональный преобра зователь 11 частоты импульсов и ком мутатор 12, . Кроме того, Тренаж оператора содержит выносной панорамный индикато 13 для визуального наблюдения и контроля инструктором имитируемого движения объекта и носителя. Выходы 14 начальной установки пульта 1 подключены к первой группе входов преобразователя 3. Информадионные выходы 15 пульта 1 подключе через информационные входы блока 4 одной частью к первой информационно группе входов 16 блока 10 и второй частью к входам 17 преобразователя тактовый вход 18 которого подключен через тактовый вход блока 4 к тактовому выходу 19 преобразователя 3. Командные выходы 20 пульта 1 подключены через командные входы блока 4 к первым управляющим входам 21 коммутатора 12, второй управляющий вход 22 которого подключен к выходу блока 10. .. - . Вторая группа входов 22 преобразователя 3 подключена через первую группу выходов 23 блока 4 к счетным выходам 24 реверсивного счетчика 9 и к второй группе входов 25 блока 10 первой пары, формирователей 5 и б, а третья группа входов 26 преобразователя 3 подключена к информационным входам пульта 2 и через вторую группу выходов блока 4 к счетным выходам реверсивного счетчика 9 и к второй группе входов блока 10 второй пары формирователей 7 и 8. Выходы 27 имитации обстановки преобразователя 3 подключены к входам пульта 2, выходы 28которого подключены к выносному, панорамному индикатору 13. Выход 29преобразователя 11 подключен к коммутируемому входу коммутатора 12, выходы 30 и 31 которого подключены к счетным входам реверсивного счетчика 9. Тренажер работает следующим образом. Начальные координаты имитируемого объекта относительно носителя локационной станции, т.е. пеленг П и дальность do поступают на одну группу .входов 14 преобразователя 3. С выхода преобразователя 3 начальные координаты в виде имитированного эхосигнала неподвижного объекта поступают на вход 27 пульта 2 и далее на вход выносного панорамного индикатора 13 аналогично изображению на экране панорамного индикатора пульта 2 (точка О на фиг. 2). Центр экрана панорамного индикатора 13 привязан к условной геограческой точке, в которой в начальный момент времени находится носитель локационной станции(точка Н на фиг. 2) . Параметры курса объекта КОБ и носи теля Кц, скорости объекта Удр и носител.я Уц , обеспечивающие динамику движения объекта и носителя 1 через блок 4, состоящий из следящих систем формирователей 5-8. При этом ка)вдый из параметров (ciB и и /и поступает на вход своей следящей системы, т.е. на вход 16 блока 10, на . другой вход 25 которого поступает с выхода реверсивного счетчика 9 код отслеживания. На выходе 22 блока 10 в зависимотси от разности входных кодов 16 и 25 вырабатывается знак разности, поступающий на второй .уп- равляющйй вход коммутатора 12. Комм татор 12 в эависимойти от знака .ности направляет поток импульсов на суммирующий 30 или вычитающий 31 вход реверсивного счетчика 9. Поток импульсов, поступающий на вход 29 коммутатора 1 -вырабатывается на выходе преобразователя 11, на тактовый вход 18 которог с выхода преобразователя 3 поступаю импульсы, а на информационные входы 17 поступает код,определяющий пост янную времени следящей системы и зависящей от заданной инерции имитируемого объекта (носителя ). С выхода 24 реверсивного счетчика 9 код отслеживания увеличивается или уменьшается в зависимости от знака выхода 22 блока 10 до тех пор, пока не сравняется с выходным кодом отслеживаемого параметра. Знаковый выход 22 блока 10, роль которого выполняет цифровой сумматор, включенный на вычитание кодов, при отслеживании параметров VQP и у. , берется с выхода переноса старшего разряда, а при отслежива нии Кц берется с выхода суммы старшего разряда, чтобы разность кодов в блоке 10 уменьшалась по кратчайшему пути, . коды КОР, Vpg Кц , Уц с выходов 23 и 26 блока 4 поступают на 1реобразователь 3, причем коды V с выхода 26 блока 4 поступают на инфор мационные входы пульта 2 для вычерчи вания траектории движения носителя локационной станции относительно центра экрана выносного панорамного индикатора 13. После ввода параметров , Кц и Уц в преобразователь 3 и вычисле ния в нем текущих координат объекта поступающих на вход 27 пульта 2 в виде имитированного эхосигнала подвижного объекта, на выносном панорам ном индикаторе 13 вычерчиваются прямолинейные траектории движения объек та и носителя (прямые 00 ,НН на фиг.2) Для осуществления маневра объекта или носителя с пульта 1 выдаются их коды конечных курсов или скоростей в виде скачка кодов. Каждая следящая система отрабатывает свой скачок кода с введенной для данной следящей системы постоянной времени отработки. При этом коды, поступающие в преобразователь 3, изменяются плавно и маневр носителя и объекта близок к реальному (кривые и I н фиг. 2). В данном случае для осуществления маневра инструктору не требуется непрерывно и плавно изменять парамет ры объекта и носителя, а достаточно ввести их скачком один раз. Для реализации маненра циркуля ции с выхода 20 команд пульса 1 поступают сигнальа на первые управляющие входы 21 коммутаторов 12, отслеживающих курсы, а с -информационных выходов 15 пульта 1 в данном случае на вход 17 преобразователя 11 поступает код скорости изменения курса. Каждый коммутатор 12 направляет поток импульсов на суммирующий 30 или вычитаквдий 31 вход своего реверсивного счетчика 9 в зависимости от требуемого направления. При этом коммутатор 12 не реагирует на знак выхода 22 блока 10. Реверсивный счетчик 9 следящей системы объекта (носителя) изменяет непрерывно на своем выходе 24 код/ а на Е ЫНОСНОМ панорамном индикаторе 13 вычерчивается траектория движения объекта (носителя) по окружности (кривая фиг. 2) . Достаточно изменить знак команды направления и траектория движения объекта (носителя) плавно изменится в обратное направление (кривая 0 04или на фиг. 2), Расчет радиуса циркуляции производится по формуле R - (о/с) где V - скорость объекта (носителя); : . ц), - скорость изменения курса; Введение в тренажер новых блоков и наличие указанных связей .позволяет по сравнению с известным устройством расширить функциональные возможности тренажера, а именно: - имитировать близкие к реальным условиям маневры объекта и носителя; - изменять маневр объекта и носителя в процессе тренировки, услож-, ;няя траектории движения объекта и носителя,В сравнении с известным устройством, выполненным на электромеханических блоках, предлагаемое устройство характеризуется меньшими габаритами и весом, а также затратами на изготовление, так как его вычислитель-, ное и сглаживающее устройства, а также задающая часть пульта инструктора, выполнены на интегральных микросхемах. Формула изобретения 1. Тренажер оператора локационных станций, содержащий -лоследовательно включенные пульт преподавателя, преобразователь координат-, пульт оператора и индикатор, о тличающийся тем, что,с целью расширения дидактических в.ез-... можностей тренажера, в него введены
четыре формирователя кодов, первые входы которых соединены с вторым выходом преобразователя координат, вторые, третьи и четвертые входы - соответственно с вторым и третьим выходами пульта преподавателя, выход первого и второго формирователей кодов подключены к второму входу преобразователя координат, выходы третьего и четвертого формирователей кодов соединены с третьим входом преобраэователя координат и вторым входом пульта оператора.
2. Тренажер по п. 1, отличающийся тем,что в нем формирователь кодов содержит последовательно включенные функциональный преобразователь, коммутатор, реверсивный счетчик и блок сравнения,выход которого соединен с вторым входом коммутатора, первый и второй входы функционального преобразователя, второй вход блока сравнения и третий вход коммутатора являются соответственно первым, вторым, третьим и четвертым входами формирователя, выход реверсивного счетчика является выходом Формирователя.Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 636659, кл, G 09 В 9/00, 1978.
2.Авторское свидетельство СССР № 643955, кл. G 09 В 9/00, 1978.
3.Авторское свидетельство СССР № 539309, кл. G 09 В 9/00, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора локационных станций | 1982 |
|
SU1072086A2 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1091212A1 |
| Тренажер оператора систем управления | 1981 |
|
SU987655A1 |
| СПОСОБ ИМИТАЦИИ ТРАЕКТОРИЙ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2419072C2 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| Тренажер оператора котельной установки | 1986 |
|
SU1319065A2 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| ТРЕНАЖЕР КОЛЛЕКТИВА ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ | 1998 |
|
RU2176108C2 |