Ю
О
00
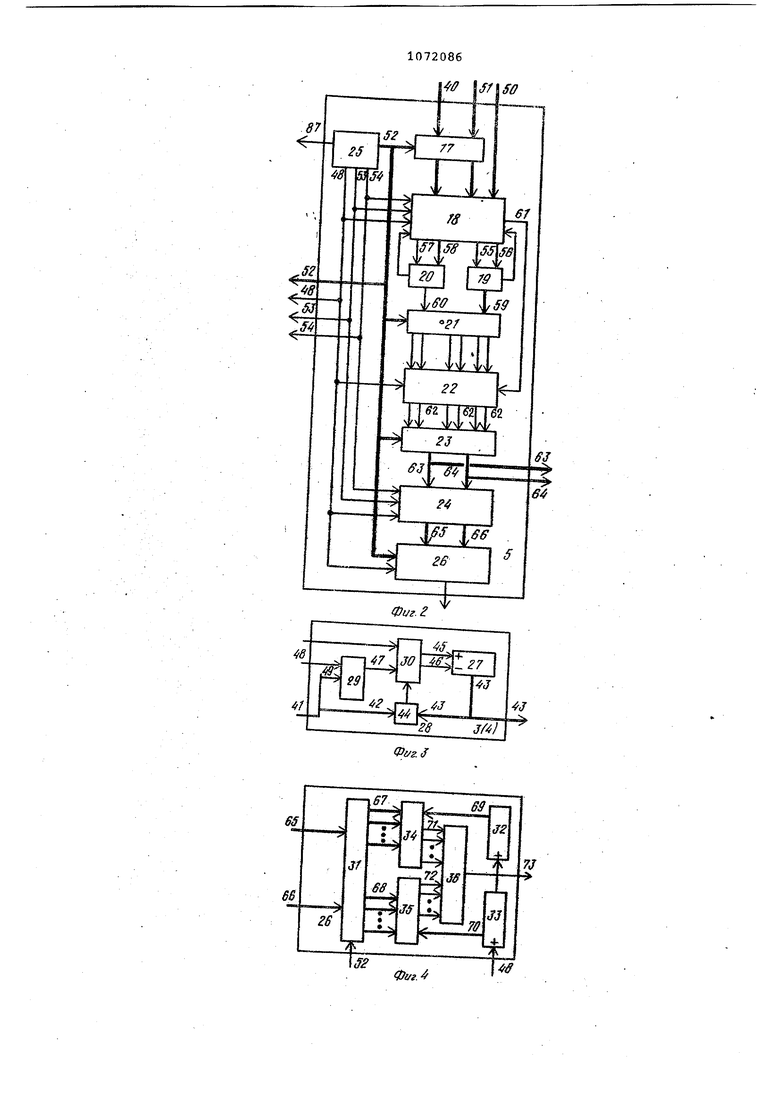
СЗГ Изобретение относится к аваогщтике и вычислительной технике,, в частности к моделирующим устрс йГтвам и вьчислительныи средствам, Может быть использовано при под-Тотонке операторе локационных стсИаци В тренажерах: подготовки операто ров локационных станций возникает необхолимость имитации обстановки движения Носителя локационной с:ан ции среди других подвижных объектов, Например, при лвииении носителя входящего в порт или движущегося в тумане в непосредственной близости от других перемещающихся объектов. В целях безопасности движения носителя требуется обучение операторов локационных станций определять с большой точностью координаты подвижньж объектов, при этом возникает необходимость вычисления ошибки оператора при определении им координат одного из множества имитируемых объектов. Текущие координаты имт-гтируемых объектов, движения которых моделируготся в тренажере, выдаются из счетно-решающего устройства тренс;жера в устройство отображения инфор мации, которое входит в состав г:уль та оператора. Задача оператора сводится к опра делению и с-ьему координат отобра ае мых объектов путем совмещения маркера с отметкой от объекта. При совмеценик оператором (-apKepa с отметкой о:: объекта коор;чиь-,1 ты последнего (пеленг и дальпость) поступают в блок оцемки и контроля действия оператора, где прсисход :т сравнение их с коор.г гтнатами имитируемых объектов . вычисленньчх сче но-режущим устройством,, Так к-ак из счетно-решаюшего устройства в блок оценки и контроля поступа-от: координаты от имитируемых объектов, эпдача вычисления ошибки оператора усложняется, ибо прекд:;е требуется определить foT имитир;/емый объе;гТ;. съем координат которого произвел оператор. Указанную задачу можно ре шить, определив минимальное расстоя ние между точкой с коордиЕ-атамИ;, зы работаннымк оператором (т.е., координаты маркере в прямоугольной сис теме координат и и ТСЧГШМИ координаты которых характеризуют по ложение имитируемиз; обьетстовс По основному авт. ев, №99::. изЕес тен тренажер оператора докаиЛ ониых станций, который содержит последоьательно включенные пульт преподап :-йп преобразователь коор,п5.ат, пул.ьт оператора и индикатор, а также че:т ре формирователя кодов, первые вхо ды которых сое,з,инены с вторым дом преоЗра онателн координат, BiOрые, -, четвертые входы - со-, отвйтстдк :;мо с вторым и третьим выходами пульта преподавателя, выходы первого к второго Формирователя кодов подклрочены к второму входу преобразователя координат, выходы третьего и четвертого формирователей кодов соединеь;ы с третьим входом преобразователя коордиЕ- ат и вто1-:-ым пходог- пульта оператора 1J . Недостатком известного тренажера является , что он имитирует движение только Носителя локационной станцил и однс:1го подвижг ого объекта, причем оденка оператора определяется по вьносному панорамному индикатору непосредственно преподавателем. Цель изобретения - расширение дк™ дак;-ическ ;х возмокностей тренажера эа счет имитапии множества подвижных объектов с последующим вычисле(ием ошибки сопровожд,ения оператоРО; одпого из имитир уемых объектов. Г1остлв,пенная цель .достигается тем, vxo в тренажер введены после.лозательно включенные блок суммирования, первый счетчик, блок умножения кодов J первый элемент ИЛИ,, первый Гз.гемент И, второй счетчик, третий счетчик, второй элемент И-и регистр, пторой вход которого соединен с третьим выходо11 преобразователя (сор.диГат, и ВТОРОЙ элемент ИЛИ, вход вход которого подключен к второму вкходу блока умнох ения кодов, а выход - к второму входу первого clGTiKKa второй, третий,, че вертый и пятый входы блока умножения кодов соединены соответственно с первы:-- и вторым выходами блока суммировап::я г; четвертым и пятым ВЕлходам : преобразователя координат шестой выход которого подключен к 2Top;-vM входам второго алемента И и третьего счеачика,- третий вход ксгорогсз соодикен с выходом первоIo э,емента -ШИ., а выход - с вторым входом парвого Э11емента И, первый, второй; третий и четвертый входы блс1ка суммирования подключены соответственно к- седьмому и восы мому выходам преобразователя координат и ;; второму и третьему выхопам nyjfbTa оператора „ Яс. фиг, показг|Ь ы, структурные cxebiHi соответственно тренажера, преобразователя координат, форми- рователя кодов/ преобразователя код - араменной интервал, входягщего в состав преобразователя коор дина, пул,ьта операторй;; на фиг. б геоглетри еокое определение наименьггего расс гояния; ка фкг, 7 временная дкаграмм-з работы блока углно ения,, Трэнажер оператора локационных стсгИций содержит ттульт i преподавателя, предназначенный для набора параметров движения имитируемых объектов и носителя в виде цифровых кодов и состоящий из управляе™ мой вручную тастатуры, позволяющей получать набор данных, характеризующих параметры имитируемых объектов и носителя; цифровой индикации, позволяющей контролировать набираемый параметр и блока вывода данных; блок 2 согласования предназначенный для сглаживания выходных параметров движения объектов и носителя в течение заданного времени и состоящий из формирователей 3 кодов, предназначенных для сглаживания выходных параметров носителя (скорости носителя и курса носителя) и формирователей 4 кодов, предназначенных для сглаживания выходных параметров объектов {скорости объекта и курса объ екта), преобразователь 5 координат, пульт б оператора, блок 7 суммирования, блок 8 умножения кодов, 9 и 10 ИЛИ, счетчики 11-1
элементы 14 и 15 И, реэлементыгистр 16.
Преобразователь 5 координат состоит (фиг. 2) из мультиплексора 17 предназначенного для поочередного ввода параметров, блока 18 разложения векторов, предназначенного для В1 гчисления текущих значений ортогональных составляющих дальносI ти и векторов скорости в виде чис ло-импульсных кодов, сумматоров 1 и 20, предназначенных для суммирования текущих значений ортогональных составляющих в виде число-импульсных кодов, блока 21 приемных регистров, предназначенного для приема информации с сумматоров 19 л 20f блока 22 интеграторов, кал-дая пара которых предназначена для вычисления ортогональных составлягоших результирующей дальности получаемой между объектом и носителем за некоторое время и с: ммирования их с ортогональными составляющими начальной дальности объекта мультиплексора 23, предназначенного для поочередного выбора параметров с блока 22, блока 24 вычисления по лярных координат, предназначенного для преобразования прямоугольных координат в полярные, генератора 25 импульсов, преднаёначеного для выработки синусного и косинусного число-импульсных кодов, сдвинутых друг относительно друга на длительность тактового импульса, кода порядкового номера вычисления в данный момент объекта, а также тактовых импульсов, преобразователя 26 код - временной интервал,, предназначенного для преобразования текущих кoopли; aт объекта в имитированный отраженный от него сигнал.
Формирователи 3 и 4 кодов содержат (фиг. 2 и 3) реверсивный счетчик 27, блок 28 сравнения, функциональный преобразователь 29 и коммутатор 30.
Преобразователь 26 код - временной интервал содержит (фиг. 4) регистр 31 приема кодов, счетчики 32 и 33 развертки текущего пеленга и
0 дальности, узлы 34 и 35 сравнения и узел 36 элементов И-ИЛИ.
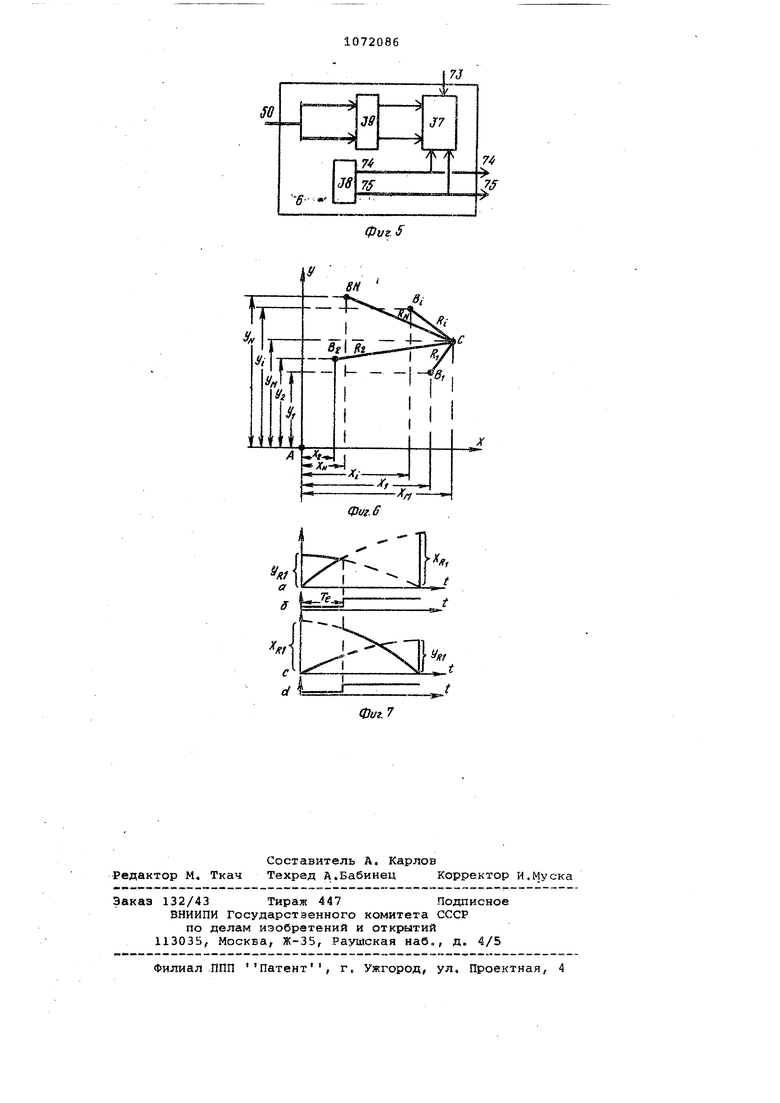
Пульт 6 оператора предназначен для слежения и выдачи координат имитируемых объектов, а также для
5 автоматического смещения центра полярного растра панорамного индикатора и содержит (фиго 5) панорамный индикатор 37, блок 38 слежения и вьщачи координат и блок 39 раз0вертки с учетом смещения центра полярного растра.
Тренажер работает следующим образом.
Преподаватель с помощью пульта 1
5 набирает требуемые параметры начальных условий, т.е„ начальные координаты имитируемых объектов относительно носителя локационной станции и параметры движения объектов и но0сителя.
Начальные координаты поступают с выходов 40 пульта 1 непосредственно на входы мультиплексора 17, а начальные параметры движения объектов и
5 носителя поступают с выходов 41 на соответствующие формирователи 3 и 4 блока 2, т.во на вход 42 блока 28; соответствующего формирователя 3 или 4, на другие входы 54 которого посту0пают с выхода реверсивного счетчика 27 код отслеживания На выходе 44 блока 28 в зависимости от знака разности входных кодов 42 и 43 выраба|тывается знак разности, поступающий на управляющий вход коммутатора ЗОо Коммутатор 30, в зависимости от поступающего знака разности, направляет поток импульсов на суммирующий 45 или вычитающий 46 входы реверсивного счетчика 27. Поток
0 импульсов, поступающий на вход канмутатора 30, вырабатывается на выходе 47 преобразозателя 29, на тактовый вход которого с выхода 48 преобразователя 5 (генератора 25)
5 поступают тактовые импульсы, а на информационные входы 49 преобразователя 29 с выходов 41 пульта 1 поступает код, определя1вдий постоянную времени формирователя кодов в
0 зависимости от заданной инерции имитируемого объекта (носителя),
С выхода реверсивного счетчика 27 код увеличивается или уменьшается в зависимости от знака на выхо5
де 44 блока 28 ло тех пор, пока не сравняется с входным кодом отслеживаемого параметра.
Знаковый выход 44 блока 28, роль которого выполняет цифровой сумматор, включенный на вычитание кодов, при отслеживании параметров скорости берется с выхода переноса старшего разряда, а при отслеживании . курса берется с вьзхода суммы старшего разряда для того, чтобы раз-с ность кодов в схеме сравнения уменьшалась по кратчайшему пути,
С выходов 50 блока 2 одни коды поступают на выходы блока 18 разложения векторов и пульта 6 оператора, а другие коды с выходов 51 поступают На входы мультиплексора 17, который в зависимости от кода порядкового номера вычисления, поступающего на вход управления мультиплексора 17 с выхода 52 генератора 25, разрешает прохождение параметров объекта на входы блока 18 разложения векторов.
На функциональные входы блока 18 разложения векторов с выходов 48,, 53, 54 генератора 25 поступают число-импульсные коды функций синусс и косинуса, а также тактовая частота.
Блок 18 производит разложение векторов скорости и канальное расстояние на ортогональные составляющие в виде число-импульсных кодов которые с выходов 55 и 56 блока 18 разложения векторов поступают на входы cyiviMaTopa 19 а число-импульсные коды вьтходов 57 и 58 поступают на входы сумматора 20, где производится су 1мирование определенным образом.
Коды с выходов 59 и 60 cyMivjaTOров 19 и 20 поступают на входы блока 21 приемных регистров и далее на соответствующие пары интеграторов блока 22, которые производят вычисление ортогональных составляющих результирую1дей дальности за заданное время и суммируются с кодами р поступающими с выходов 61 бло,ка 18. i, С выходов 62 блока 22 коды пос тупают на входы: му ль Tim лек сора 23 и далее с выходов 63 и 64 мультиплексора 23 - На ВХОДЫ блока 7 суммирования и входы блока 24 вычисления полярных координат, куда поступают также число-ш пульсные ко,ды функций синуса и косинуса и тазетовая частота с выходов 48, 53 и 54 генератора 25.
Блок 24 производит преобразование прямоугольны г координат в полярные,
С выходов 65 и 66 блокс1 24 коды поступают на регистры 31 и далее на соответствующие входы 67 и 6В узлов 34 и 35, на вторые входы которых поступают с выходов 69 и 70 счетчиков 32 и 33 сигналы развертки текущего пеленга и дальности.
В момент сравнения кодов на выходах 71 и 72 узлов 34 и 35 вырабатываются импульсы (сигналы сравнения), которые поступают через узел 36 на вход 73 отображения панорамного индикатора 37 и отображаются на нем в виде отметки эхосигнала.
Оператор, перемещая рукоятку сле5 женин и выдачи координат блока 38, на выходах 74 и 75 которого вырабатываются координаты маркера, поступающие на .входы панорамного индикатора 37, совмещает маркер с отметка ми эхосигнала. При этом координаты маркера, соответствующие данному объекту, поступают на вторые входы блока 7 суммирования, который, в свою очередь, производит cy Iмиpoвaние (вычитание) согласно выбранному алгоритму
Далее ортогональные составляющие координат объекта в виде параллельных двоичных кодов поступают с выходов 77 и 76 блока 7 суммирования на информационные входы блока 8 y чнoжeния, где производится умножение указанных кодов на синусный и косинусный число-импульсные коды, подаваемые с выходов 53 и 54 генератора 25 на функциональные входы блока В умножения На выходах 78 и 79 блока 8 получаем числоимпульсные коды, которые поступают через элемент 9 ИЛИ на счетный вход 80 счетчика 11, в который в начальный момент времени счета заносится число, равное величине одной ортогональной составляющей расстояния до объекта,
В состав генератора 25 входит счетчик, который производит развертывание текущего угла (аргумента) путем счета тактовых импульсов, причем указанный счетчик и счетчик 11 работают синхронно со всем процессом вычисления.
Одна часть разрядов счетчика в генераторе 25 является разрядами аргумента, а другая часть предназначена для формирования кода порядкового номера вычисления, разрядность которых выбирают количеством имитируемых объектов
Через некоторое время Т(фнг. 7а;
0 б) после начала отсчета счетчик 11 устанавливается в нулевое состояние и на его выходе 81 вырабатывается сигнал запрета счета,, поступающий ка вход запрета счета блока 8
5 который запрещает прохождение число-импульсного кода с выхода 82 и одновременно разрешает прохождение число-импульсного кода с выхода 83 (фиг. 7с). Затем число-импульсные коды с выхода 84 элемента 10 поступают через элемент 14 при наличии сигнала разрешения, поступающего на другой его вход с выхода счетчика 1 на счетный вход счетчика 12, При этом на выходах 86 счетчика 12 накапливается параллельный двоичный код расстояния и при окончании развертывания текущего угла (аргумента) в генераторе 25 величина расстояния становится равной некоторюй определенной величине.
Одновременно с формированием величины расстояния в счетчике 12 число-импульсный код расстояния с выхода 84 элемента 10 поступает на тактовый вход вычитания счетчика 13 в котором в начальный момент времени записывается код максимально .возможного расстояния.
По окончании формирования величины расстояния с выхода 87 генератора 25 на вход предварительной записи счетчика 13 и через элемент
15на вход синхронизации регистра
16поступает импульсный сигнал. При этом и счетчик 13 запишется величина, , которая поступает на ее информационные входы с выхода счетчика 12, а в регистр 16 запишется номер имитируемого объекта. После этого производится установка В О счетчика 12, что является исходным состоянием для операций вычисления и сравнения расстояний до объектов.
Далее на блок 7 суммирования поступают координаты имитируемого объекта со следующим номером.
Операции, связанные с реализацией описанных выше процессов, повторяются, а дальнейшие вычисления отлича1лтся от вышеописанных при заданных - условиях.
Так, при поступлении число-импульсного кода величины расстояния до очередного объекта с выхода 84 блока 8 на тактовый вход счетчика 13 наступает момент, когда соответствующий разряд счетчика 13 установится в нулевое состояние, т.е. на его выходе 85 вырабатывается сиг.нал запрета, поступающий на вторые входы (входы запрета) элементов 14 и 15,
При этом дальнейшее прохождение число-импульсного кода расстояния .через элемент 14 на вход счетчика 12 прекращается, поэтому на его вы ходах 86 зафиксируется код величи ны расстояния предыдущего объекта
Импульсный сигнал, формируемый
на выходе переноса предыдущего разряда счетчика аргумента, т.е с выхода генератора 25, свидетельствующий о завершении формирования очередного расстояния, запишет в счетчик 13 значение расстояния. -В то же время импульсный сигнал не прой5 дет через элемент 15 (ввиду запрета на его входе) на вход синхронизации регистра 16 и последний сохранит прежнюю запись номера имитируемого объектар
0 При заданных условиях операции определения величины расстояний до очередного объект.а аналогичны операциям, рассмотренным применительно к имитируемому предыдущему объек5 ту.
Таким образом вычисляется, значение расстояния каждого имитируемо го объекта и проходит сравнение со значением, минимальным из уже оп-,
0 ределенных расстояний. После вышеописанной обработки координат всех имитируемых объектов в счетчике 13 . будет зафиксирована величина равная наименьшему из всего множества
5 сравниваемых расстояний, а в регистре 16 - номер объекта, которому соответствует эта .величина. При этом величина наименьшего расстояния рассматривается как оценка работы
n оператора по определению и сопровождению им координат имитируемых объектов, предварительно выводя номера на индикацию или другой источник регистрации.
Выполнение тренажера указанным
5 выше образом позволяет распшрить дидактические возможности его за счет имитации множества подвижных объектов с последугадим вычислением ошибки сопровождения оператором од0 ного из имитируемых объектов, а также определения номера имитируемого объекта, сопровождаемого оператором.
в сравнении с базовьм объектом, выполненным на электромеханических
5 блоках и имитирующим движение только одного подвижного объекта, предлагаемое устройство характеризуется широкими дидактическими возможностями за счет ирдатации несколь0 кик подвижных объектов с последующим вычислением ошибки определения координат сопровождаемого оператс-. ром одного из имитируемых объектов возможностью определения препода5 вателем (регистрации) номера объек та, сопровождаемого операторомj малыми затратами на изготовление (в пересчете на имитацию одного. подвижного объекта), так кяк не тре0 буется дорогостоящего оборудования для изготовления высокоточных электромеханических блоков, а также высокой надежностью, так как блоки устройства выполнены на интеграль5 ных элементах цифровой техники.
ff i/ fft/ emo/fu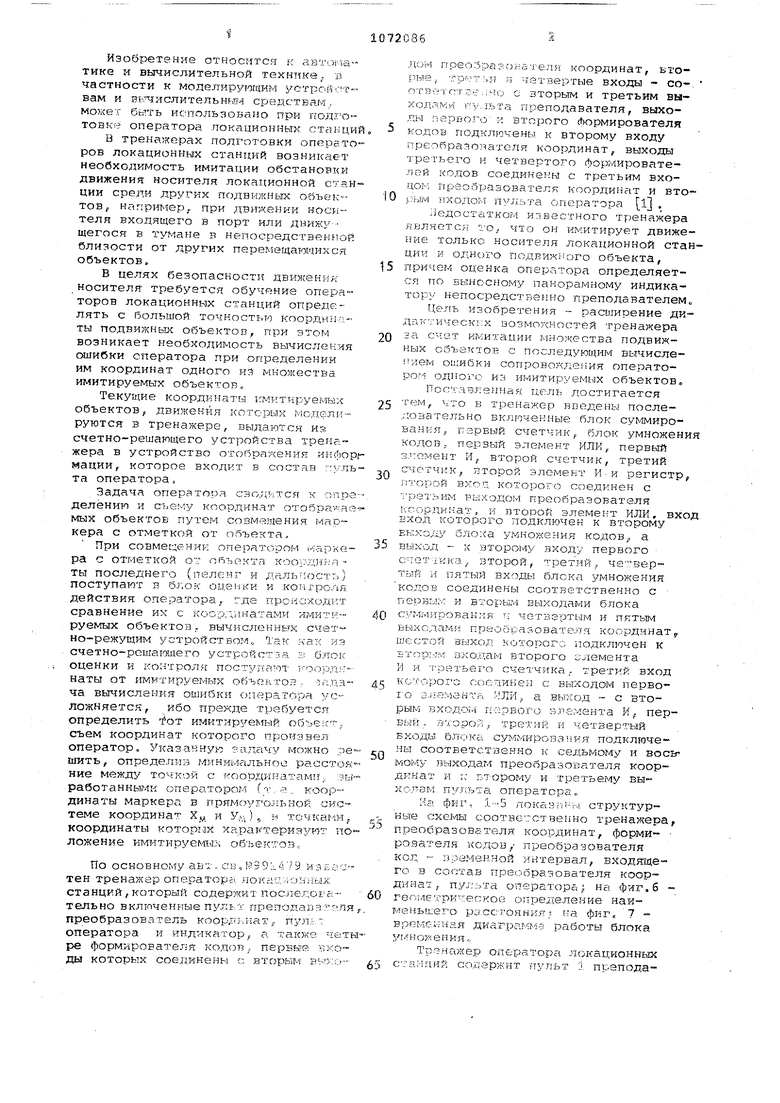

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора локационных станций | 1981 |
|
SU991479A1 |
| Устройство для преобразования координат | 1984 |
|
SU1198552A1 |
| Устройство для преобразования координат объекта | 1980 |
|
SU951317A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ ИМИТАЦИИ ТРАЕКТОРИЙ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2419072C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1091212A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
ТРЕНАЖЕР ОПЕРАТОРА ЛОКАЦИОННЫХ СТАНЦИЙ по авт. св„ №991479, отличающийся тем, что, с целью расширения дидактических возможностей тренажера, в него введены последовательно включенные блок суммирования, первый счетчик, блок умножения кодов, первый элемент ИЛИ, первый элемент И, второй счетчик, третий счетчик, второй элемент И и регистр, второй вход которого соединен с третьим выходом преобразователя координат, и второй элемент ИЛИ, вход которого подключен к второму выходу блока умножения кодов, а выход - к второму входу первого счетчика, второй, третий, четвертый и пятый входы блока умножения кодов соединены соответственно с первым и вторым выходами блока суммирования и четвертым и пятым выходами преобразователя координат, шестой выход которого подключен к вторым входам второго элемента И и третьего счетчика, третий вход которюго соединен с выходом первого эле- мента ИЛИ, а выход - с ьторым входом , первого элемента И, первый, второй, § третий и четвертый входы блока сум(Л мирования подключены соответственно к седьмому и восьмому выходам преобразователя координат и к второму и третьему выходам пульта оператора.
77
78
76
79
-
g J I
75
V/
/rf.
N
Ж
гг
4
65
50
ff
Фг/г.4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тренажер оператора локационных станций | 1981 |
|
SU991479A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
