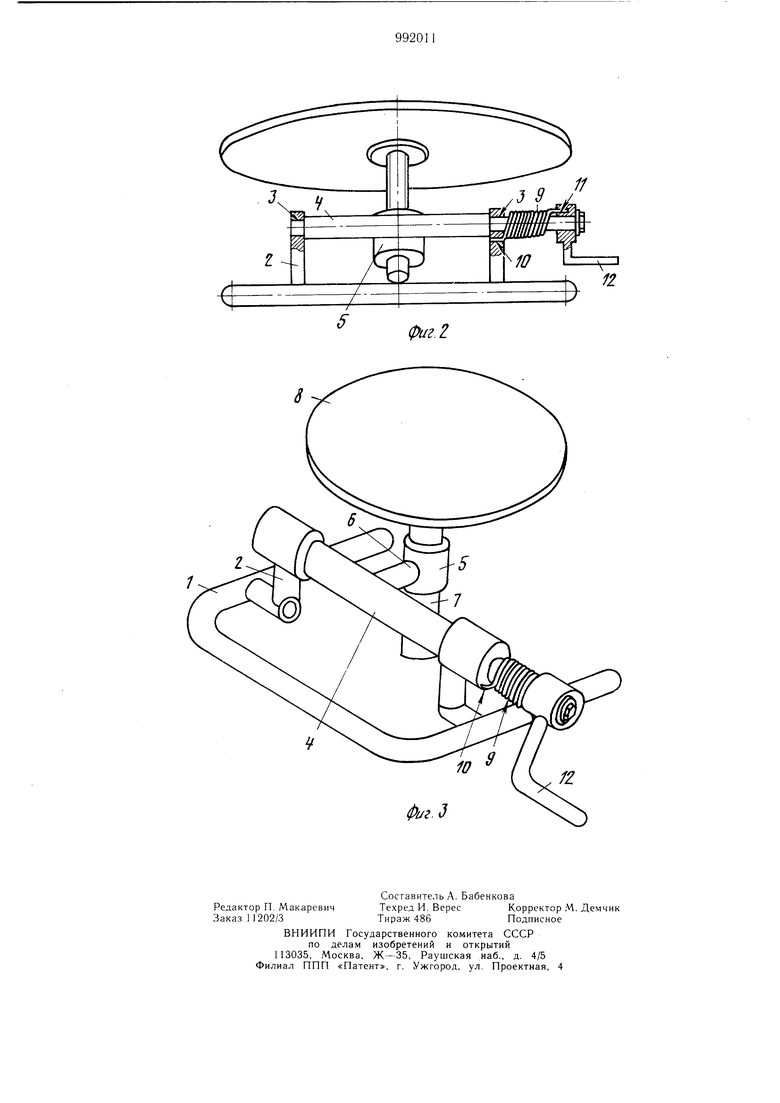
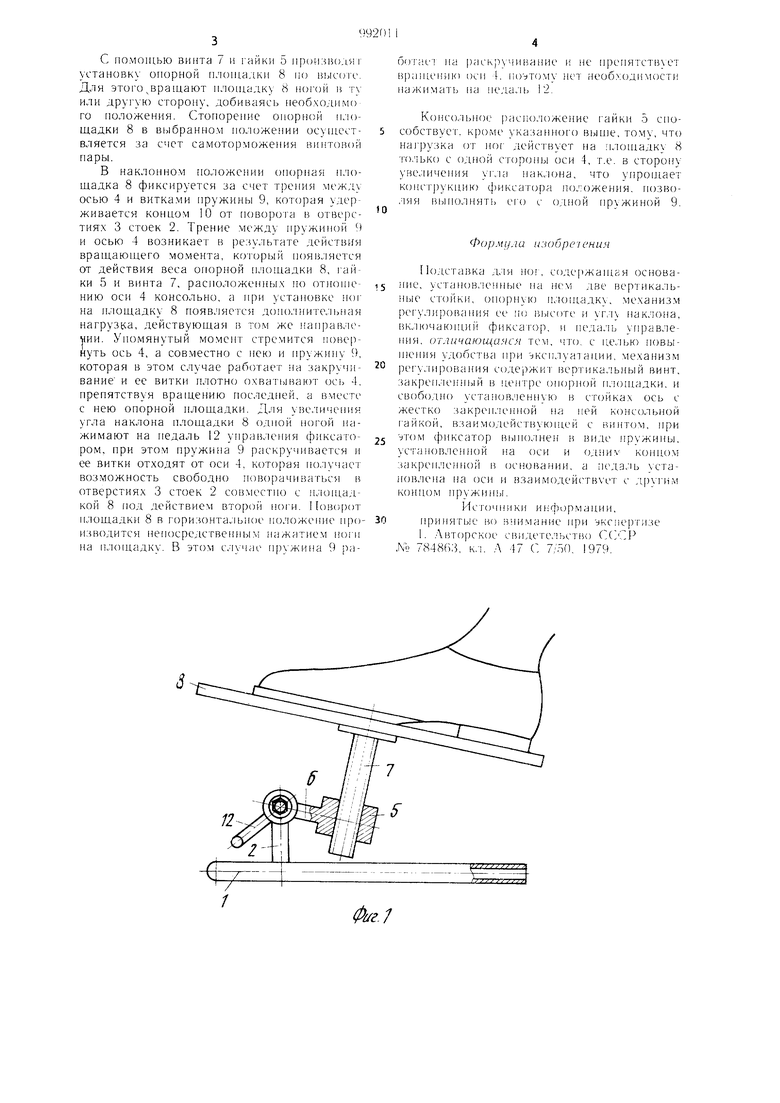
(54) ПОДСТАВКА ДЛЯ НОГ Изобретение относится к оргоснастке рабочих мест, а именно к подставкам для ног при выполнении работы в положении сидя. Известна подставка для ног, содержащая основание, установленные на нем две вертикальные стойки, опорную площадку и механизм регулирования ее по высоте и углу наклона, включающий фиксатор и педаль управления 1. Недостатком известного устройства является сложность регулирования высоты плoщaдю,cвязaннaя с рядом последовательных манипуляций с фиксаторами всех стоек и необходимостью приложения значительных усилий для преодоления сопротивления пружин. Цель изобретения - повыщение удобства при эксплуатации. Указанная цель достигается тем, что подставка для ног, содержащая основание, установленные на нем стойки, опорную площадку и механизм регулирования ее по высоте и углу наклона, включающий фиксатор и педаль управления, механизм регулирования содержит вертикальный винт, закрепленный в центре опорной пJJOщaдки, и свободНО установленную в стойках ось с жестко закрепленной на ней консольной гайкой, взаимодействующей с винтом, при этом фиксатор выполнен в виде пружины, установленной на оси и одним концом закрепленной в основании, а педаль установлена на оси и взаимодействует с другим концом пружины. На фиг. 1 изображена подставка для ног с частичным разрезом по гайке; на фиг. 2 - то же, разрез по стойке; на фиг. 3 - то же, в плане. Подставка состоит из основания 1, на котором жестко закреплены вертикальные стойки 2 с отверстиями 3. В отверстия 3 входит ось 4 вращения, жестко связанная с гайкой 5, которая соединена консольно перемычкой 6 с осью 4. С гайкой 5 взаимодействует винт 7, с закрепленной на нем опорной площадкой 8, имеющей форму диска. Фиксатор состоит из винтовой пружины 9, установленной на ось 4. Один конец 10 пружины 4 закреплен на стойке 2 основания 1, а со вторым концом 11 взаимодействует педаль 12, установленная на оси 4. Устройство работает следующим образом.
с помощью винта / и айки 5 производя г установку опорной п/юшадкп 8 по высоте. Для этого , площадку 8 по1Ч)й в ту или другую сторопу, добиваясь необходимо го положения. Стопорепие опорной площадки 8 в выбранном положении осуществляется за счет самоторможепия винтовой пары.
В наклонном положении опорная площадка 8 фиксируется за счет треиия между осью 4 и витками пружины 9, которая удерживается концом 10 от поворота в отверстия.х 3 стоек 2. Трение между иружинсп 9 и осью 4 возникает в результате действия вращающего мо.мента, который появ;1яется от действия веса опорной Ккмцадки 8, гайки 5 и винта 7, расположенны.х но отношению осп 4 консольно, а при установке ног на площадку 8 появляется дополнительная Harpyatca, действующая в том же нанравлечии. Уиомянутый момент стре.мится iioBe|)нуть ось 4, а сов.местно с нею и пружину 9. которая в этом случае работает на закручивание и ее витки нлотно охватывают ось 4. препятствуя вращению последней, а вместе с нею опорной нлощадки. 1ля уве,1иче |ия угла наклона плоидадки 8 одной ногой нажимают на педаль 12 унравления фиксатором, при этом пружина 9 раскручивается и ее витки от.ходят от оси 4, которая получает возможность свободно иово)ачиваться в отверстиях 3 стоек 2 совместно с и;10ии1Дкой 8 под действием BTOpini носи. )от илощадки 8 в горизонтальное положение производится непосредственным нажатием ноги на площадку. В этом с.учае н 1ужина 9 laКонсольное расположение |айки .5 способствует, кроме указанного Bbinje, тому, что на1рузка от ног- действует на площадку 8 только с одной CTopoiHii оси 4, т.е. в сторону увеличения yr;ia пак.юна, что ynponiaeT конструкпию фиксат(}ра положения, иозво,1яя выполнять С1Ч) с одной пружиной 9.
Формула ч:)брс1 ения
Подставка для нсл , содержаи1оя основаinic, уста 1овлепные на две вертика:п ные стойки, опорную пл(.)щ,адку, механизм рсгул11рова 1ия ее io р.ысоте и углу наклона, включаюпщн фиксатор, .и педа.ль управлепия, отличающаяся тем, что. с це;пж) повышепия удобства при эксплуатации, механизм регу.лирования содержит вертикальный винт, закрепле1ПП)1Й в це.итрс гяюриой плонгадки, и свободно установленную в стойках ось с жестко закрен,ле1П1ОЙ на пей консольной |айкой, взаимодействуюп.1ей с винтом, ири этом фиксатор выиолнеп в виде пружины, усга11овле 1ной на оси и ОДНИУ концо.м закрснлс П1ой в основании, а педа.ль становлеиа на оси и взаимодействует с конпом пружины.
Источники и 1-: фор мани и, принятые во внимание нри экспертизе I. .Лвторское свпдетельст «) СОГ.Р ,N9 784863, K.-I. Л 47 С 7;оО. 1979.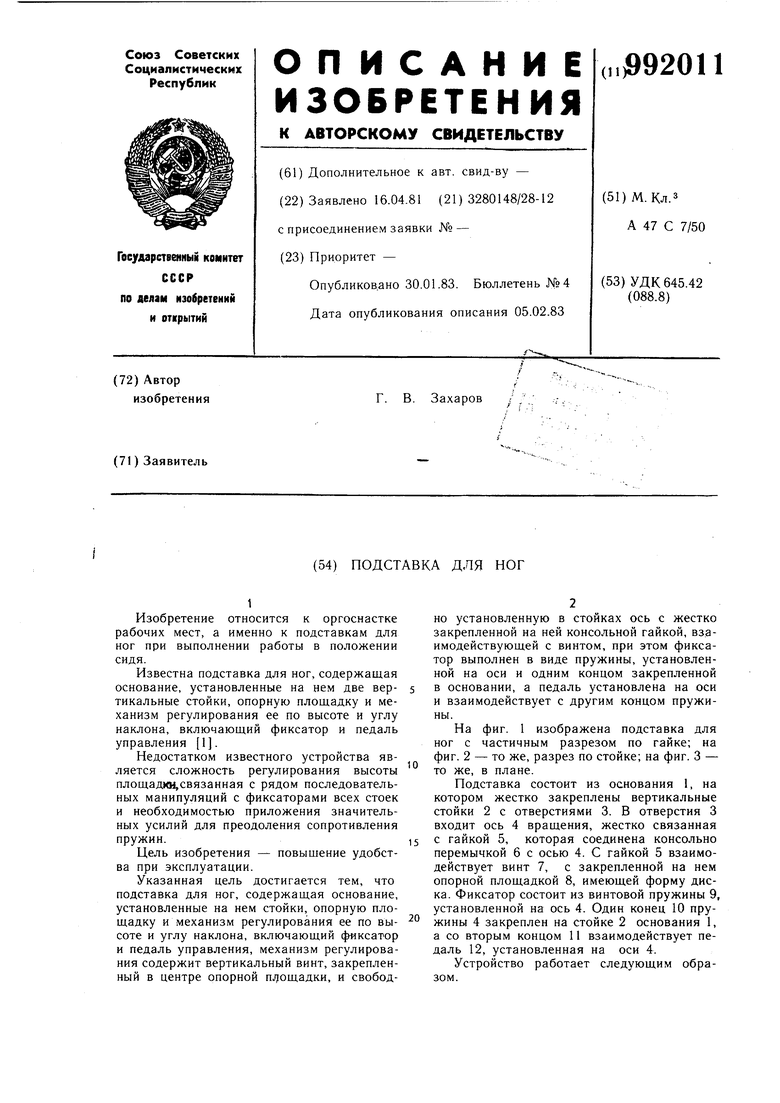
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ | 2003 |
|
RU2231475C1 |
| ОРТОПЕДИЧЕСКОЕ ТРЕНИРОВОЧНОЕ УСТРОЙСТВО | 1993 |
|
RU2084255C1 |
| ПОДСТАВКА ДЛЯ НОГ | 2003 |
|
RU2239344C1 |
| СКАМЕЕЧКА ДЛЯ НОГ | 1992 |
|
RU2020850C1 |
| Передвижные подмости | 1979 |
|
SU912881A1 |
| Кресло микрохирурга | 2017 |
|
RU2672019C1 |
| Подставка для ног | 1979 |
|
SU784863A1 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| Грузоподъемная тележка | 1979 |
|
SU960060A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |