Изобретение относится к устройствам ввода команд в ПК и может быть использовано в компьютерных играх для управления полетом виртуального самолета.
Известен игровой манипулятор «Thrustmaster HOTAS Warthog» (), состоящий из двух устройств: ручки управления самолетом (РУС) и двойной рукоятки управления тягой двигателя (РУД), выполненных из тяжелого металла. На ручке расположено 18 кнопок управления, 8-позиционный переключатель видов (hat). На РУД имеются 32 кнопки, хэт и мини-джойстик. Манипулятор многофункционален, но не отражает реального процесса управления самолетом, так как не имеет педалей. Кроме того, манипулятор достаточно дорогой и недоступен многим пользователям компьютеров.
Известен игровой манипулятор-штурвал Saitek Pro Flight Yoke System (), состоящий из штурвала и модуля управления тягой, закрылками и шагом винта, имеющие 42 программируемые функции, 2 нажимающиеся и 6 двухпозиционных клавиш, а также восьмипозиционный переключатель видов. Модуль управления представляет собой корпус с тремя рычагами, под которыми располагаются три двухпозиционных выключателя. Головки рычагов имеют разную форму, что позволяет различать их на ощупь и не отвлекаться от монитора компьютера. Фиксация штурвала и модуля на компьютерном столе обеспечивается струбцинами. Данный манипулятор также не отражает реального процесса управления самолетом, так как не имеет педалей.
Восьмипозиционные переключатели видов не обеспечивают точности наведения на интересующий объект, находящийся на стыке видовых экранов. Кроме того, сами рукоятки джойстиков (как и в «Thrustmaster HOTOS Warthog») из-за малой высоты их рычагов имеют недостаточную амплитуду отклонения, что снижает точность управления самолетом и физические ощущения при его управлении.
Известно устройство «силовой джойстик» (заявка на изобретение РФ №2003130952 от 20.10.03 г.), содержащее игровой стержень со съемными рукоятками, нижний конец которого выполнен в виде шара и размещен в стакане, образующем среду регулируемого трения, и дополнительной оптической мыши. От клавиш мыши сделаны электрические отводы, которые оканчиваются кнопками, размещенными на съемной рукоятке. Оптическая мышь, сканирующая шаровую поверхность, управляет положением курсора на экране монитора персонального компьютера в зависимости от перемещения указанного игрового стержня. Световой поток от оптической мыши подводится к поверхности шара, и, отраженный от его поверхности, подается на вход датчика перемещения мыши с помощью отдельных световолоконных кабелей. Данное устройство не может быть использовано в полной мере для управления полетом виртуального самолета в соответствующих компьютерных играх.
Наиболее близким является силовое устройство к джойстику для управления виртуальным самолетом по патенту РФ на полезную модель №60871 от 15.09.2006 г. Устройство состоит из двух частей с платформами, одна из которых является механизмом управления рулем направления, выполненном в виде педалей, устанавливаемых на полу, а вторая, с ручками управления - механизмом управления газом и закрылками, устанавливаемом на столе. Обе части устройства подключаются к джойстику, с помощью которого производится управление элеронами, рулем «высоты» и оружием. Педали выполнены с датчиком их отклонения и дугами для фиксации ног, подвижно соединены с консолями тяги и установлены на поворотной балке. Балка соединена с возвратным механизмом и подвижно закреплена на платформе со смонтированными на ней тягой педалей и кронштейном датчика и установленной на опорной плите. Кронштейн выполнен с возможностью его поворота для регулировки датчика. Управление газом и управление закрылками осуществляется двумя ручками управления, соединенными с рычагами, выполненными с возможностью поворота относительно оси их крепления и с ограничителями перемещения, причем рычаг управления закрылками установлен на коромысле, выполненном в виде двуплечего рычага и соединенном пружинно-шарнирными механизмами с ограничителями с пластиной микровыключателей. Платформа ручек управления выполнена в виде корпуса с интегрированной в него струбциной. Данное устройство недостаточно функционально, требует наличие джойстика, для его крепления необходимо место на столе.
Заявляемое силовое устройство, как и известные, содержит устройство с рукоятками управления двигателем и закрылками и педали для управления рулем направления виртуального самолета с датчиком их отклонения и дугами для фиксации ног, подвижно соединенными с консолями тяги и установленными на поворотной балке, соединенной с возвратным механизмом и подвижно закрепленной на платформе со смонтированной на ней тягой педалей, причем платформа установлена на опорной плите; рукоятки управления газом и закрылками выполнены с возможностью поворота относительно оси их крепления.
Задачей изобретения является создание базового устройства - педалей, которыми осуществляется управление рулем направления виртуального самолета, способного к расширению путем подключения дополнительных устройств, первым из которых является РУД (устройство с рукоятками управления двигателями, закрылками и шасси), снабженный четырьмя рычагами, и узлом крепления съемной винтовой струбцины, вторым - РУС (ручка управления самолетом) с адаптацией конструкции РУД под стандартное компьютерное кресло, для расширения ассортимента дополнительных игровых устройств к домашним компьютерам, позволяющих дома, а не в игровом центре, получить реалистические ощущения при управлении виртуальным самолетом.
Технический результат заключается в расширении функциональных возможностей силового устройства с повышением реалистичности, удобств пользования им в процессе игры и точности управления виртуальным самолетом. Технический результат заключается также в повышении технологичности изготовления устройства.
Технический результат по первому варианту исполнения достигается тем, что каждая педаль выполнена с подвижной тормозной площадкой, поворачивающейся вокруг цапф в пределах вырезов в щеках дуги, выполненной с боковыми отогнутыми вверх буртами и свободным концом опирающейся на пружину, установленную в самоустанавливающуюся тарелку. Поворотная балка выполнена Г-образного сечения, установлена на опорном подшипнике, смонтированном в опорной плите, и имеет ухо для соединения со штоком вытяжного типа силового цилиндра возвратного механизма. Опорная плита выполнена в виде Т-образного основания с ребрами жесткости, на консоли поперечины которой имеется ухо для крепления силового цилиндра возвратного механизма; датчик отклонения педалей представляет собой потенциометр, корпус которого закреплен в платформе, установленной на тяге справа или слева от оси вращения, на валу потенциометра насажен поводок, пазом сопряженный со стержнем кронштейна, закрепленным на неподвижной оси вращения тяги. Устройство с рукоятками управления двигателями, закрылками и шасси (РУД) представляет собой корпус, состоящий из основания с отогнутыми вверх участками, передним и задним, и левой стенки, с наружной стороны которой на оси поворота закреплен блок рукояток управления двигателями, выполненный с возможностью регулировки их по высоте, с перегородкой и двумя рукоятками, на общей неподвижной оси в которой закреплены валы их потенциометров, корпуса которых связаны с соответствующими рукоятками. Параллельно левой стенке на основании установлена другая перегородка, с одной стороны которой размещена четырехпозиционная рукоятка закрылков с зубчатым венцом, взаимодействующим с лепестком узла микровыключателей, на оси которой с другой стороны насажена с возможностью поворота и перекоса относительно этой оси рукоятка управления шасси, перемещаемая по вырезу в наклонной П-образной рамке, и пружина, установленная на этой же оси и прижимающая обе рукоятки к перегородке. Каждая из рукояток имеет механизм отдачи, в основании корпуса РУД выполнен узел фиксации, представляющий собой прямоугольный вырез внизу основания корпуса, переходящий спереди в окно с закрепленным внутри корпуса по диагонали над вырезом шариковым фиксатором.
Технический результат по второму варианту исполнения достигается тем, что силовое устройство дополнительно содержит ручку управления самолетом (РУС), установленную на узел датчиков руля высоты и элеронов, представляющий собой съемную платформу РУС с отогнутыми вверх под прямыми углами щеками, в которых имеются отверстия под вал, выполненным с вырезом под площадку для установки на ней качающейся платформы датчика элеронов, выполненной с двумя скосами в нижней части, которыми она в крайних положениях упирается в вал руля высоты вдоль его образующей и ограничивает отклонение РУС. Корпус датчика руля высоты связан со щекой съемной платформы РУС, а его вал закреплен в отверстии в торце вала руля высоты, датчик элеронов выполнен рычажного типа, закреплен на качающейся платформе и имеет поводок, сопряженный с кронштейном, неподвижно закрепленным на валу руля высоты. На другом торце вала руля высоты размещен рычаг, выполненный с двумя скосами, определяющими его крайние положения, и связанный с штоком вытяжного типа цилиндра возвратного механизма РУС, удерживающего РУС в отклоненном от пользователя положении. РУС закреплена в передней части основания педалей и оканчивается кольцеобразной рукояткой, в нижней части которой размещена коробка с рычагами кнопок управления вооружением самолета и рычагом ручного тормоза, в верхней части закреплен указатель вида, содержащий пластмассовый корпус с печатной платой, излучателем и фотоприемником оптической мыши. К корпусу прикреплена полусферическая ниша с фланцем, в котором установлены микровыключатели, соединенные с печатной платой, в нише размещена пустотелая сфера из прозрачного полимера с матовой внутренней поверхностью, закрытая крышкой в виде усеченной сферы и отстоящая от фотоприемника на определенном расстоянии в зависимости от толщины стенки сферы и обеспечивающим фокусировку света на фотоприемнике. В узле фиксации основания корпуса РУД установлен кронштейн, представляющий собой трубчатое тело, состоящее из двух частей в виде стаканов, соединенных донцами и выполненных с возможностью их поворота относительно друг друга и с узлом автоматической их фиксации в новом положении. Стаканы имеют одинаковые цилиндрические вставки с прорезями, в которых установлены площадки, выполненные с возможностью их поворота и с автоматической фиксацией шариковыми фиксаторами, размещенными во вставке у конца прорези.
Возвратный механизм педалей может быть выполнен в виде цилиндра с крышкой, открытого со стороны крепления к уху консоли поперечины основания и связанного с ухом двухступенчатым пальцем, проходящим через стенки цилиндра, при этом ухо расположено между уступом пальца и вырезом в стенке цилиндра, через отверстие в крышке проходит шток с резьбой на одном конце и диском на другом, между диском и крышкой размещена пружина сжатия. Механизм отдачи рукоятки закрылков может представлять собой U-образную скобу с двумя кнопками и пружиной между ними, с которыми в крайних положениях контактирует своими отогнутыми участками рукоятка закрылков; механизм отдачи рукоятки шасси представляет собой П-образную рамку, боковые участки которой, имеющие крутой профиль, обеспечивают возможность соскальзывания рукоятки под действием пружины, одетой на ось рукоятки. Возвратный механизм РУС может быть выполнен в виде силового цилиндра, открытого со стороны крепления его к уху на щеке платформы РУС, размещенному внутри цилиндра, для чего в стенке цилиндра выполнен соответствующий вырез, и связанного с ухом пальцем, проходящим сквозь стенки цилиндра. Ручка РУС может быть выполнена в виде изогнутой полимерной трубы, рукоятка выполнена в виде кольца с прямолинейными боковыми и верхним участками или в виде эллипса, вытянутого по вертикали. Узел автоматической фиксации стаканов кронштейна относительно друг друга может представлять собой размещенную в донце одного стакана пружину, удерживаемую и центрируемую крышкой с болтом, ввернутом в донце другого стакана и зафиксированном в нем гайкой с шайбой, контактирующей с двумя стальными шариками, вставленными в отверстия донца данного стакана, которые сопрягаются с отверстиями в донце первого стакана при их повороте для фиксации в новом положении.
Изобретение поясняется с помощью чертежей и рисунков, на которых представлены: на фиг.1 - педали вид сверху, на фиг.2 - педали вид слева, на фиг.3 - вид спереди устройства с рукоятками управления двигателями, закрылками и шасси (РУД), на фиг.4 -вид слева РУД, на фиг.5 - вид справа РУД, на фиг.6 - схема размещения всех частей силового устройства при игре, на фиг.7 - общий вид напольной части силового устройства педали с ручкой управления самолетом (РУС), на фиг.8 - вид сверху педалей с основанием ручки управления самолетом (РУС), на фиг.9 - вид справа платформы РУС, на фиг.10 - вид сзади платформы РУС, на фиг.11 - вид спереди рукоятки РУС, на фиг.12 - вид слева рукоятки РУС, на фиг.13 общий вид кронштейна крепления РУД (с разрезом).
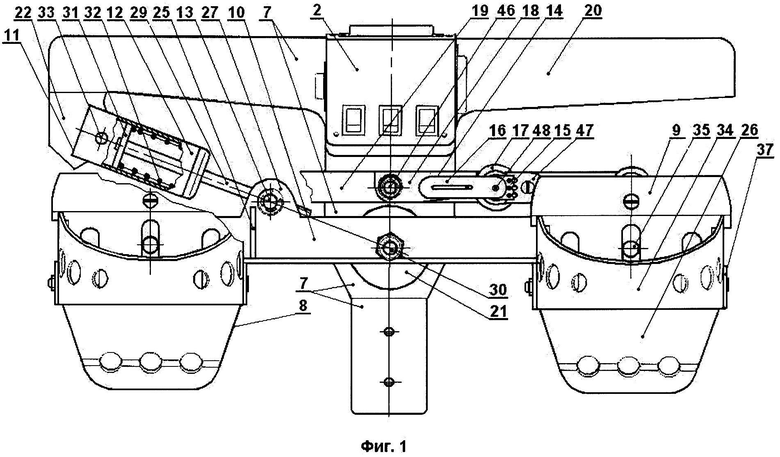
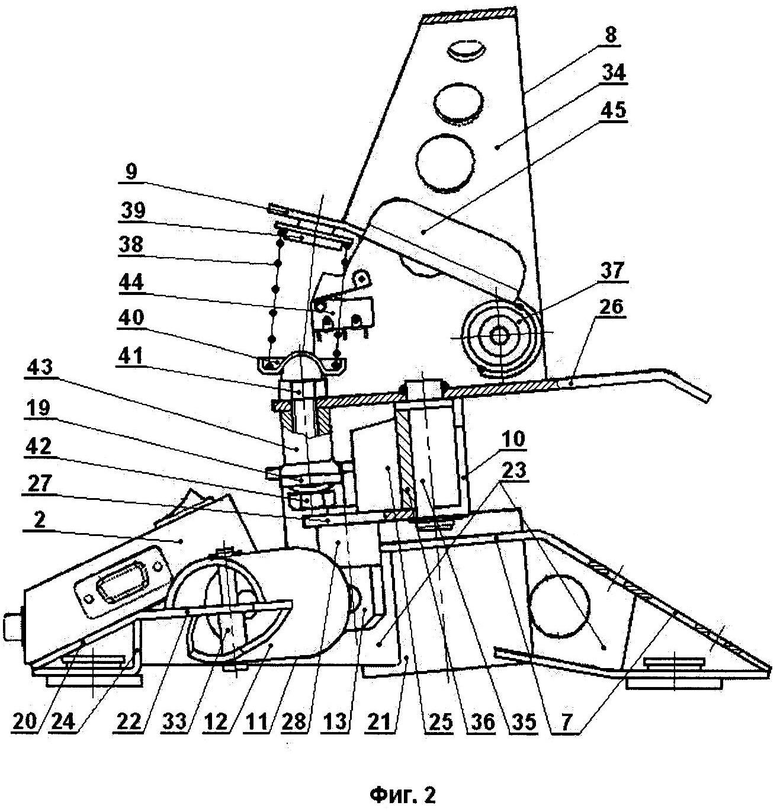
Силовое устройство к компьютеру для управления виртуальным самолетом по первому независимому пункту формулы представляет собой устройство, состоящее из двух основных частей: педалей (руль направления) 1, с коробкой коммутации и переключения режимов 2 (см. фиг.1, 2); и устройства РУД (см. фиг.3, 4, 5) 3 с рукоятками управления закрылками 4, шасси 5 и двигателями 6. Корпус устройства РУД 3 крепится к столу при помощи съемной струбцины (не показана).
Базовой частью устройства (см. фиг.1, 2) служат педали 1 с коробкой коммутации и переключения режимов 2, к которой подключается РУД 3 при помощи соответствующего шнура с разъемом. Педали 1 состоят из следующих основных частей: основания 7 педалей, двух педалей 8 с тормозными площадками 9 под ступни ног, поворотной балки 10, возвратного механизма 11, представляющего собой силовой цилиндр 12 и ось с головкой 13, узла датчика отклонения педалей 14, состоящего из датчика-потенциометра 15 с поводком 16, платформой 17 и кронштейном 18, и тяги 19 педалей. Основание 7 педалей выполнено Т-образным с тремя точками опоры, его поперечина 20 одновременно является ограничителем при установке педалей 1 под компьютерным столом, предотвращающим такую их установку, при которой максимальное отклонение педалей могло бы повредить вертикальные поверхности стола. Узел подшипника 21 поворотной балки 10 подвешен под продольной частью основания 7, задняя наклонная поверхность которого, переходящая в поперечину 20, служит для монтажа коробки коммутации и выбора режимов 2. На левой консоли поперечины 20 имеется ухо 22 для крепления силового цилиндра 12 (возвратного механизма 11 балки), выполненное заодно с поперечиной 20 и отогнутое с целью горизонтального расположения цилиндра 12. Продольная жесткость основания 7 обеспечивается продольными (передним и задним) ребрами жесткости 23 Г-образного сечения, объединяющими узел подшипника 21 с передней и задней наклонными поверхностями основания 7. Поперечная жесткость - ребром жесткости 24 под поперечиной 20, с которой оно образует трубчатую структуру треугольного сечения. Для поворотной балки 10 применен подшипник опорного типа как наиболее распространенный в технике, что повышает технологичность изготовления устройства.
Поворотная балка 10 имеет Г-образное сечение, что улучшает технологичность ее изготовления в сравнении с Т-образной прототипа, т.к. она может быть изготовлена, например, на вырубном штампе с последующей гибкой, или быть вырезана из Г-образного профиля, или изготовлена другим способом. На левой стороне балки 10 расположен ограничитель отклонения педалей 25, выполненный в виде пластины, перпендикулярной обеим полкам балки 10, в торцевую поверхность которой при максимальном отклонении педалей 1 упирается своей боковой поверхностью тяга 19, соединяющая основания 26 педалей. Там же расположено ухо балки 27 с втулкой снижения 28, в которую снизу вставлена с возможностью поворота ось с головкой 13, имеющей радиальное отверстие для резьбового конца штока 29 силового цилиндра 12. Ухо 27 может быть выполнено заодно с горизонтальной полкой балки 10, или торцом приварено к ней. Наличие уха 27 обусловлено необходимостью обеспечения одинаковой величины вытягивания штока 29 из цилиндра 12 в крайних положениях отклонения педалей 1, а значит, и прикладываемого для этого усилия, что гарантировано, если при нейтральном положении балки 10 ось уха 27 лежит в плоскости, проходящей через ось крепления цилиндра 12 к основанию 7 и ось поворота 30 балки 10.
Возвратный механизм 11 балки 10 педалей представляет собой силовой цилиндр 12, выполненный в виде цилиндра с крышкой, через которую проходит шток 29 с резьбой на одном конце, и с приваренным диском 31 на другом. Между диском 31 и крышкой внутри цилиндра находится пружина 32 в предварительно сжатом состоянии. Резьбовой участок штока 29 пропущен через отверстие в головке оси 13 уха балки 27, и с другой стороны на него навинчена гайка (не показана), которой регулируется предварительное сжатие пружины 32. Предварительное сжатие пружины 32 необходимо для позиционирования педалей 1 в нейтральном положении после исчезновения отклоняющего их усилия. Увеличение предварительного сжатия делает это позиционирование более четким, а прикладываемое усилие для отклонения педалей 1 большим, что добавляет реализма при управлении педалями. Цилиндр 12 к уху 22 поперечины основания крепится с помощью двухступенчатого пальца 33, проходящего через обе стенки цилиндра, зафиксированного снаружи стопорным кольцом (не показано) на участке меньшего диаметра. При этом ухо 22 оказывается между уступом пальца снизу и вырезом вдоль образующей в стенке цилиндра сверху, нижняя часть стенки цилиндра не контактирует с ухом 22 и сохранена только для отверстия под палец. Такая конструкция силового цилиндра 12 повышает технологичность изготовления устройства.
Каждая педаль 8 (см. фиг.1, 2) состоит из дуги 34, щеки которой снизу приварены к основанию 26, в котором имеется отверстие с вставленной и закрепленной в нем осью 35 педали, с помощью которых педали 8 устанавливаются во втулки 36 на консолях поворотной балки 10. Педаль 8 имеет тормозную площадку 9, которая поворачивается вокруг пары цапф 37, размещенных в передней части щек дуги 34, на угол 15°, определяемый вырезами в задней части щек дуги 34, в которых перемещаются выступы на свободном конце площадки 9. В верхнем положении площадка 9 удерживается пружиной 38. Верхний конец пружины 38 насажен на центрующий ее диск 39, закрепленный на площадке 9, а нижний вставлен в самоустанавливающуюся тарелку 40, имеющую полусферическую нишу, которой она сопряжена со сферической поверхностью колпачковой гайки 41, навинченной на выступающий конец болта 42 (в качестве контргайки), соединяющего ухо позиционирования педали (не показано), выполненное заодно с основанием 26 с резьбовой втулкой 43 и расположенное в задней части основания 26 педали с тягой 19. При нажатии площадка 9, поворачиваясь вокруг цапф 37, свободным своим концом опускается на рычаг микровыключателя 44, закрепленного на внутренней поверхности щеки дуги 34. С боков подвижные площадки 9, перемещающиеся в щеках дуг 34, имеют отогнутые вверх бурты 45 для предотвращения травмирования ступни защемлением и одновременно для придания площадкам продольной жесткости, что обеспечивает удобство пользования устройством. Основание 26 педали с фронта имеет выступающую часть, отогнутую с конца вниз (сгиб осуществлен через перфорацию), как опора под пятку ступни. Отогнутая часть основания 26 и поверхность тормозной площадки 9 педали в ненагруженном состоянии лежат в одной наклонной плоскости.
Узел датчика отклонения педалей 14 имеет перемещаемую часть (датчик-потенциометр 15 с поводком 16, платформой его крепления 17), расположенную на тяге 19, соединяющей педали, справа от оси вращения, и неподвижную - кронштейн 18, закрепленный на оси 46 вращения тяги 19. Платформа 17 потенциометра 15 имеет цилиндрическую форму, снабжена цапфой (не показана), которой она вставляется в отверстие тяги 19, в котором платформа 17 поворачивается в целях регулировки, и буртом для фиксации с помощью прижимной планки 47. На валу 48 потенциометра 15 насажен поводок 16 с пазом. Этим пазом поводок 16 сопряжен с вертикальным стержнем (не показан), расположенным на консоли кронштейна 18. При нулевом отклонении педалей 1 расстояние между стержнем и валом 48 потенциометра 15 минимально. При максимальном отклонении педалей 1 на угол 25° это расстояние увеличивается в два раза, что приводит к повороту вала 48 потенциометра на 45° (т.е. предел измерения потенциометра расширяется с 50° до 90°). В случае уменьшения первоначального расстояния между стержнем кронштейна 18 и валом 48 потенциометра 15 такая конструкция позволяет еще более расширить предел измерения потенциометра 15, что обеспечивает уменьшение влияния электрического шума потенциометра на качество управления при относительно малых 30÷50° углах отклонения органов управления. («Шум потенциометра» в игре проявляется хаотическим дрожанием рулевой поверхности, величину отклонения которой должен задавать данный прибор.)
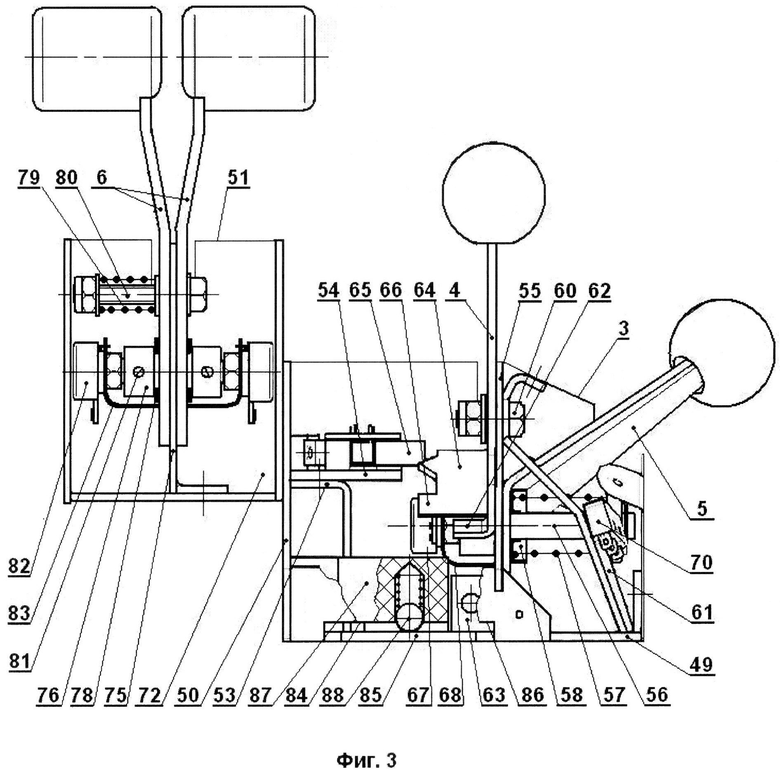
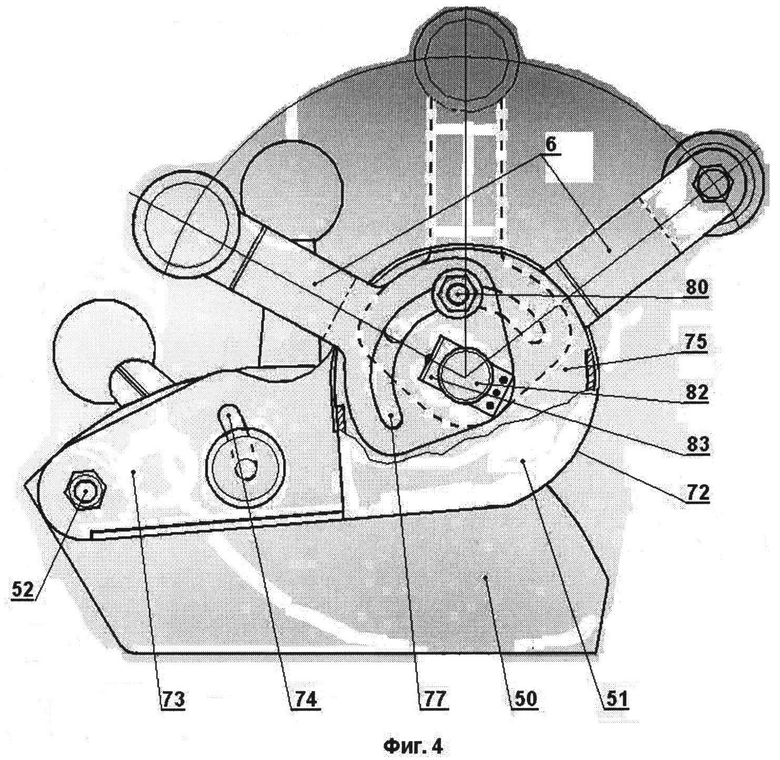
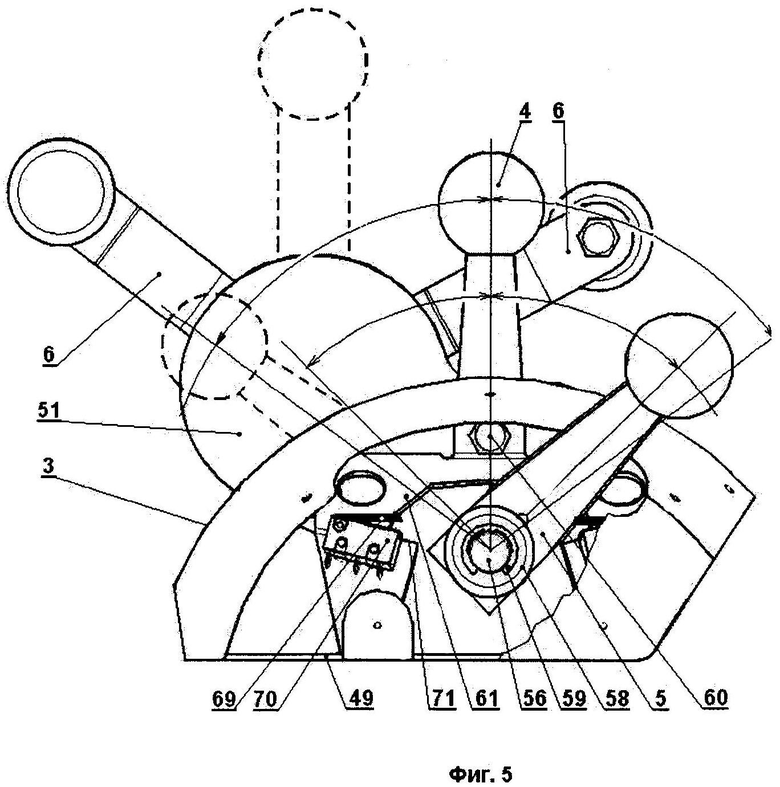
Устройство РУД 3 (см. фиг.3, 4, 5) представляет собой корпус с рукоятками управления закрылками 4, шасси 5 и двигателями (газа) 6. Устройство 3 имеет четыре рукоятки с тремя осями, в качестве которых используются аналоговые потенциометры: две оси на рукоятках газа 6 (правый и левый двигатель), четырехпозиционную рукоятку управления закрылками 4, имеющую третью ось и двухпозиционную рукоятку управления шасси 5 (выпуск/уборка шасси), установленную на оси рукоятки 4. Корпус 3 РУД (см. фиг.3) состоит из основания 49 с отогнутыми вверх передним (низким) и задним (высоким) участками и левой стенки 50, приваренной к торцовой поверхности основания 49. С наружной стороны левой стенки крепится блок 51 рукояток газа 6, который может поворачиваться вокруг оси 52, размещенной в дальней верхней части стенки 50 для регулировки положения рукояток по высоте. С внутренней стороны к стенке 50 и основанию 49 крепится Г-образная площадка 53 для установки узла микровыключателей 54 четырехпозиционной рукоятки закрылков 4. Параллельно левой стенке 50 на основании 49 устанавливается перегородка 55, по обе стороны которой размещены рукоятка управления закрылками 4 и рукоятка управления шасси 5, имеющие общую ось 56, причем на рукоятке 4 ось 56 закреплена и поворачивается вместе с ней, а рукоятка 5 вращается вокруг оси 56, имея возможность перекоса на ней. Обе рукоятки 4, 5 прижимаются к перегородке 55 пружиной 57, центрируемой на оси 56 с обоих сторон колпаками 58, насаженной на свободный конец оси 56 и зафиксированной на ней в предварительно сжатом состоянии стопорным кольцом 59. Рукоятка закрылков 4 имеет концентрический паз (не показан), в пределах которого она может поворачиваться на угол 120°, ограниченный болтом 60, вставленным в отверстие перегородки 55, которым с другой стороны крепится арка-направляющая 61 рукоятки шасси 5. Снизу рукоятка 4 имеет отогнутые на 90° площадки 62, которые в ее крайних положениях взаимодействуют с механизмом отдачи рукоятки 63, которым после прекращения внешнего воздействия на рукоятку 4, она отталкивается для освобождения соответствующего микровыключателя.
Механизм отдачи 63 рукоятки 4 представляет собой П-образную скобу, которая крепится к перегородке 55 под осью рукоятки 4, и имеет отверстия, в которые изнутри вставлены кнопки с буртами, между кнопками поставлена распорная пружина (не показано), что обеспечивает независимую работу кнопок и компактность узла. На боковой поверхности рукоятки закрылков 4 закреплен зубчатый венец 64. При повороте рукоятки 4 зубцы венца 64 последовательно входят в контакт с лепестком 65 узла микровыключателей 54, при этом лепесток 65, отклоняясь, нажимает кнопку соответствующего микровыключателя (не показан), затем, продвигаясь далее, зуб преодолевает лепесток 65 и кнопка освобождается. С обоих концов венец 64 завершается прямоугольным выступом 66, задача которого только отклонять лепесток 65 для замыкания кнопки, а механизм отдачи рукоятки 63 затем освобождает кнопку, отталкивая рычаг назад. При движении рычага рукоятки 4 в противоположную сторону последовательно нажимается и освобождается другая кнопка. Запрограммировав в игре кнопки на противоположные действия, обеспечивается ступенчатый выпуск закрылков при движении рукоятки 4 в одну сторону, и уборка при движении в другую, что подтверждает визуально и подкрепляется тактильно поворот рукоятки в нужное положение.
Выпуск/уборку закрылков в игре можно программно назначить на ось 56, в этом случае пользователь-игрок может самостоятельно выбирать угол их отклонения (для более тонкой настройки, возникающей при этом подъемной силы крыла). Для этого в отверстие оси 56 со стороны ее крепления к рукоятке закрылков 4 вставлен и зафиксирован вал (не показан) потенциометра 67, его корпус при этом от поворачивания фиксируется на перегородке 55 Г-образной реактивной тягой 68, которая предотвращает поворот корпуса потенциометра 67 вслед за поворотом его вала.
Рукоятка шасси 5 имеет площадку (основание), прижимаемую пружиной к правой стороне перегородки, с примыкающей к ней (с одной стороны) под углом 135° телом рукоятки шевронного сечения, ребро которого опирается при перемещении на внутренний вырез сложной конфигурации в арке 61, представляющей собой наклоненную П-образную рамку, которая шипами своих ног вставлена в отверстия основания, а верхним горизонтальным ребром упирается в перегородку 55 и фиксируется болтом 60, также являющимся ограничивающим и прижимным элементом для рукоятки закрылков 4 (на другой стороне перегородки). Вышеупомянутый вырез сконструирован таким образом, чтобы рукоятка 5, перемещаясь по нему только в двух своих положениях, попадала на два противолежащих участка, на которых она этим вырезом не отжимается, где ее площадка полностью прижата к перегородке 55, а пружина 57 наименее сжата (т.е. рукоятка как бы «западает» в эти участки). При переводе рукоятки 5 из одного такого положения в другое, она отжимается рамкой от перегородки 55, сжимая пружину 57, при этом ощущается возрастающее сопротивление рукоятки 5 до момента прихода ее в вертикальное положение, по мере дальнейшего ее перемещения сопротивление ослабевает, пока рукоятка 5 не попадет на другой такой же участок, после прохождения которого (пользователем момент прохождения участка не ощущается ввиду незначительного усилия по его преодолению) движение рукоятки 5 продолжается, с тем, чтобы рукоятка смогла достигнуть лепестка 69 микровыключателя 70, закрепленного на соответствующей ноге арки 61 (замыкание определяется по характерному щелчку и упору рычага в ограничительный выступ 71 арки 61), при этом, перекос рукоятки 5 и связанное с этим сжатие пружины 57 возрастают настолько, что при ослаблении давления на рукоятку 5, она отбрасывается на участок, где рукоятка 5 не имеет перекоса, лепесток микровыключателя 70 освобождается, а ориентация рукоятки 5 показывает, в каком положении находится шасси.
Блок рукояток «газа» 51 (см. фиг.3, 4) представляет собой цилиндрический корпус 72, закрепленный на кронштейне 73, способном поворачиваться вдоль левой стенки 50 корпуса РУД в пределах концентрического паза 74 на угол 38°, с возможностью фиксации в нужном положении в целях регулировки положения рукояток по высоте. Внутрь этого корпуса 72 вставляется и фиксируется при помощи двух пазов и винта перегородка 75, в которую вставлена ось 76, имеющая выступ для предотвращения ее вращения. Рукоятки 6 имеют концентрические пазы 77, позволяющие им поворачиваться относительно болта 78, проходящего через оба паза 77 и отверстие в перегородке 75 между ними на угол 114°. Обе рукоятки 6 зафиксированы на оси 76 стопорными кольцами и прижаты к перегородке 75 пружиной 79, насаженной на болт 80 с одной стороны и выполненной с регулировкой величины сжатия. Неподвижная ось 76 имеет сквозное осевое отверстие, в которое с обеих сторон вставлены и зафиксированы штифтовыми винтами 81 валы (не показаны) потенциометров 82 рукояток 6, корпуса которых при помощи Г-образных планок 83 (или реактивных тяг) фиксируются шипами в отверстиях соответствующих рукояток (т.е. корпус потенциометра 82 вращается вместе с рукояткой 6 вокруг неподвижного вала потенциометра 82). Так как рукоятки 6 разделены только перегородкой 75, то для удобства манипулирования они выполнены с изгибами, позволяющими увеличить расстояние между ними.
Для обеспечения двух вариантов крепления устройство РУД 3 снабжено узлом фиксации 84, который по первому независимому пункту формулы обеспечивает крепление на устройство РУД 3 винтовой струбцины (не показана). Узел фиксации 84 струбцины расположен в передней части основания корпуса 49 РУД, имеет прямоугольный вырез 85, переходящий на переднем отогнутом участке основания в окно 86, несколько расширенное, чем основной вырез на нижней поверхности, через которое в основание 49 вставляется площадка фиксации струбцины (не показана). Внутри устройства РУД 3 над вырезом в основании 49 по диагонали закреплен фиксатор 87, выполненный в виде бруска, например, из капролона прямоугольного сечения, снизу в котором выполнен вырез, соответствующий форме площадки фиксации струбцины и имеющий глухое отверстие с пружиной и шариком 88, упирающимся в основание 49 сразу за вырезом 85. Данный РУД может крепиться также и к компьютерному креслу специальным кронштейном (по второму независимому пункту формулы). Струбциной РУД комплектуется для крепления к столу в случае, когда применяется джойстик, подключенный к ПК отдельно от педалей с РУД.
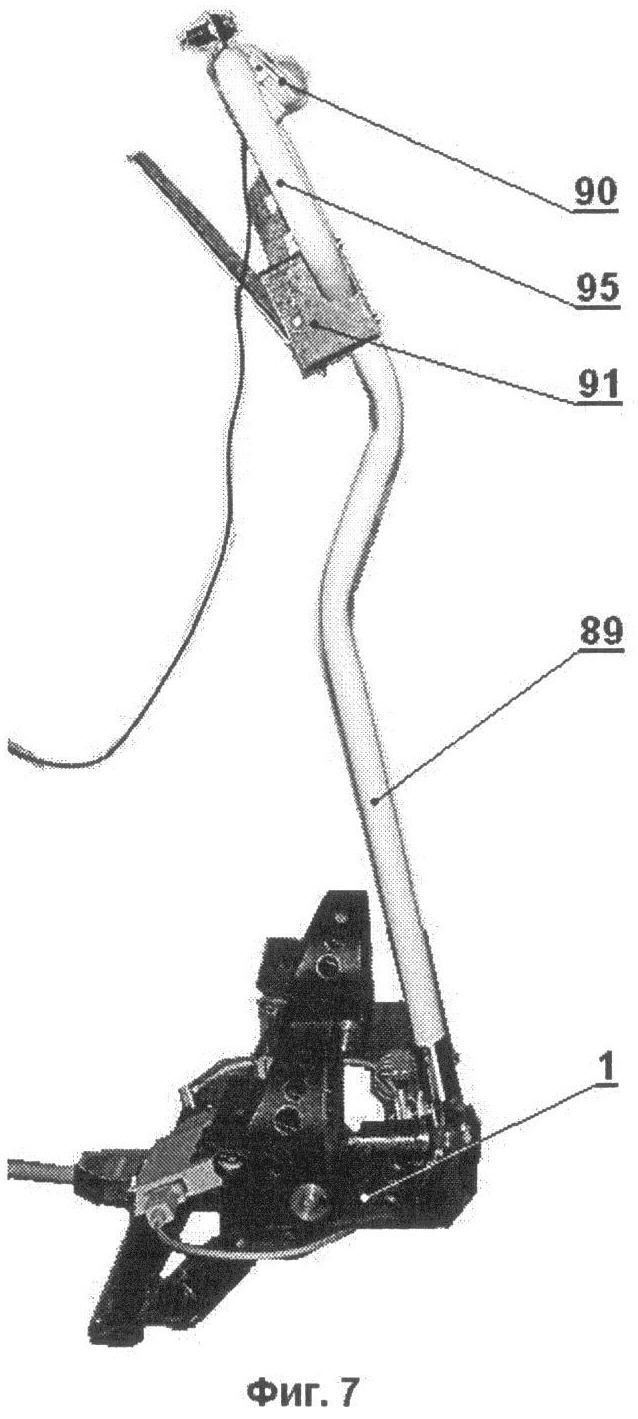
Силовое устройство к компьютеру для управления виртуальным самолетом по второму независимому варианту формулы (см. фиг.6, 7, 8) представляет собой комплекс, состоящий из трех основных частей: педалей (руль направления) 1, с коробкой коммутации и переключения режимов 2; ручки управления самолетом (РУС) 89 с указателем видов 90 и узлом 91 управления оружием и ручным тормозом; и устройства РУД 3 с рукоятками управления закрылками 4, шасси 5 и двигателями 6. РУС 89 крепится на основании 7 педалей 1 под продольной частью основания 7, передняя наклонная поверхность которого является передней точкой опоры и служит для крепления РУС 89, а корпус устройства РУД 3 имеет разъем с шариковым фиксатором 87 для крепления РУД на специальном кронштейне 92, закрепленном на кресле 93 вместо одного из подлокотников.
Базовой частью комплекса (см. фиг.6, 7) также служат педали 1 с коробкой коммутации и переключения режимов 2, к которой подключаются РУС 89 и РУД 3 при помощи соответствующих шнуров с разъемами. Связь всех устройств, подключенных к коробке коммутации 2, с ПК осуществляется через подключаемый к коробке 2 USB-контроллер 94.
РУС (см. фиг.7) состоит из ручки 89, венчаемой кольцеобразной рукояткой 95 с указателем видов 90 и узлом 91 управления оружием и ручным тормозом, узла датчиков 96 руля высоты 97 и элеронов 98.
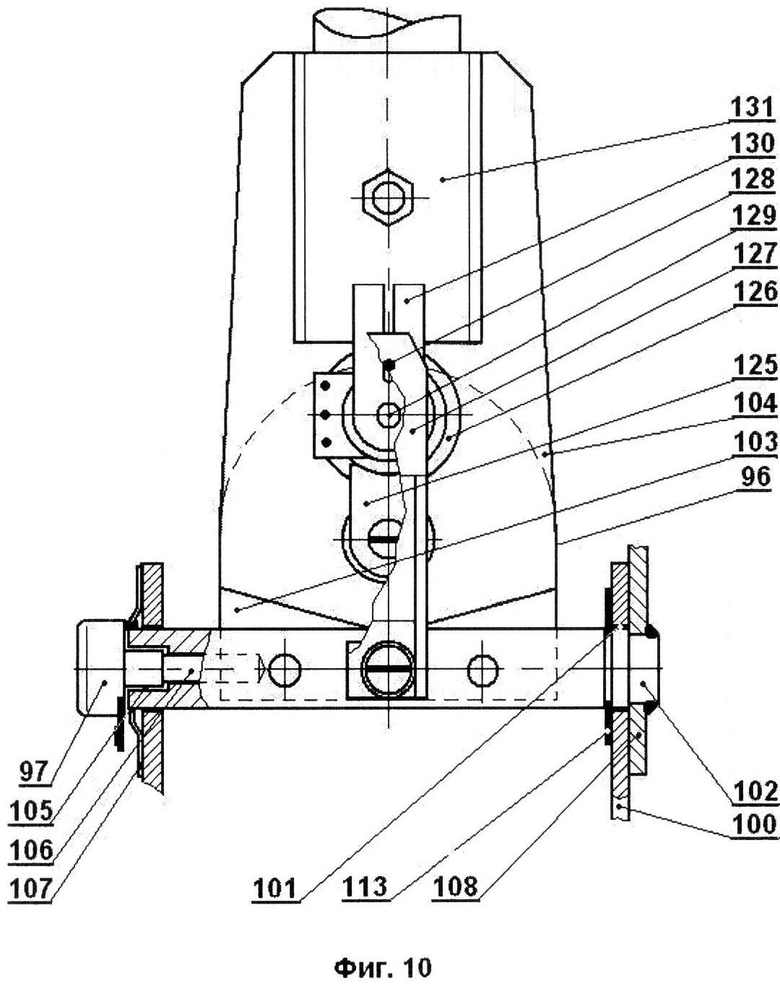
Узел датчиков руля высоты и элеронов 96 (см. фиг.8, 9, 10), являющийся частью РУС, представляет собой съемную платформу 99 (далее платформа РУС) с отогнутыми через продолговатые отверстия вверх под прямыми углами щеками 100, в которых имеются отверстия 101 под вал 102. В валу 102 выполнен вырез под площадку 103 для установки качающейся платформы 104 датчика элеронов 98, частично открывающий осевое отверстие 105, расположенное с правого торца вала 102, на глубину, необходимую для прижатия площадкой 103 уступа на консоли вала 106 потенциометра 97 (датчика руля высоты), вставленного в отверстие 105. На выступающий из правой щеки участок вала 102 насажен регулировочный диск 107, сопряженный с корпусом потенциометра 97, поворачивающийся вместе с ним при регулировке и фиксируемый затем винтом. Такая конструкция платформы 99 РУС упрощает изготовление узла 96.
С левой стороны вал 102 имеет участок меньшего диаметра, выступающий из щеки, на котором жестко закреплен рычаг 108, шарнирно-связанный со штоком 109 цилиндра 110 возвратного механизма РУС 111. На нижней части рычага 108 имеются два скоса, каждый из которых в своем крайнем положении входит в соприкосновение с пластиной 112, закрепленной под рычагом 108 на левой щеке платформы РУС 99 и ограничивающей поворот рычага 108 с валом 102 в пределах 0°÷25°. Продольное перемещение вала 102 ограничено относительно левой щеки 100 с одной стороны рычагом 108, а с другой установкой стопорного кольца 113.
Ручка 89 находится в отклоненном от виртуального пилота положении (руль высоты в положении пикирования) и удерживается в этом положении при помощи силового цилиндра 110 возвратного механизма РУС 111, шток 109 которого шарнирно соединен с рычагом 108 вала 106 датчика руля высоты, проходит через отверстие в крышке цилиндра 110, внутри которого удерживается находящаяся в первоначально сжатом состоянии пружина 114, центрируемая по ее наружному диаметру тарелкой 115, зафиксированной на штоке 109 стопорным кольцом 116. В задней части левой щеки платформы РУС 100 имеется ухо 117, к которому при помощи пальца 118 крепится цилиндр 110. Так как палец 118 проходит через стенки цилиндра 110, а ухо 117 его крепления находится внутри цилиндра 110, то в нижней части его стенки сделан вырез (не показан).
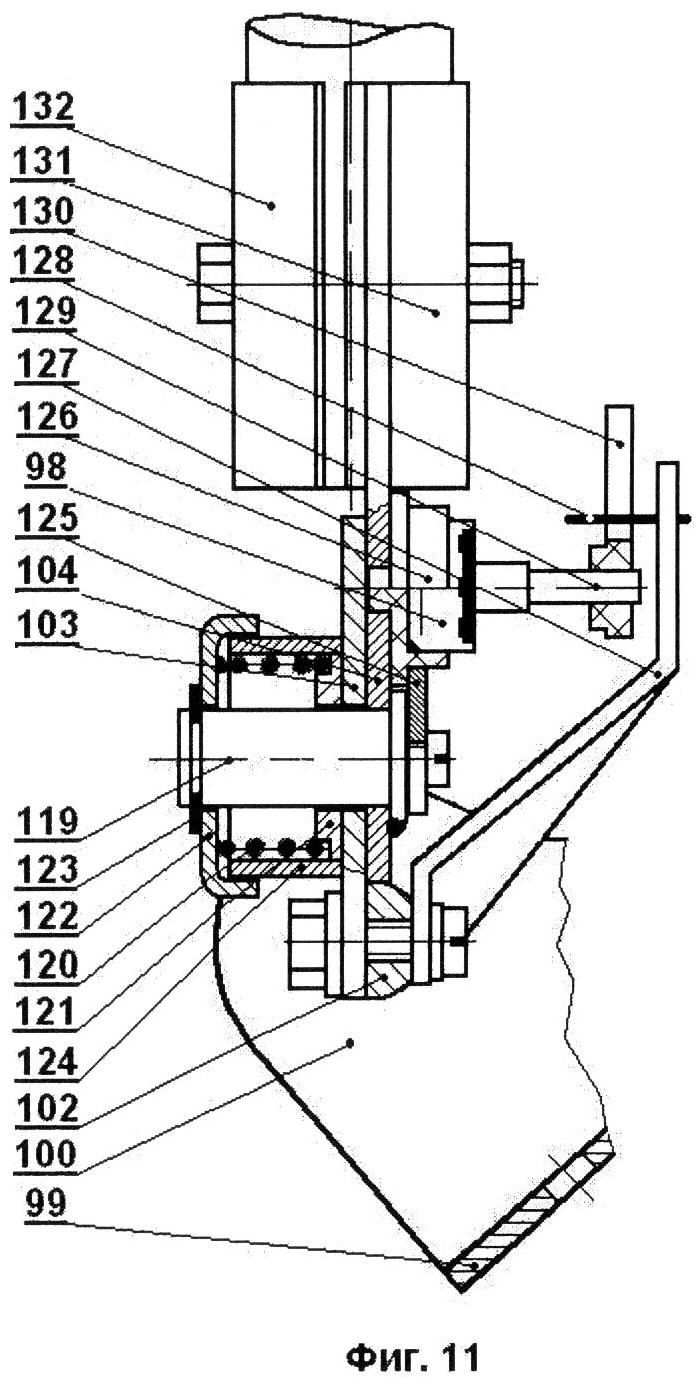
Качающаяся платформа 104 (см. фиг.10, 11) датчика элеронов 98 имеет отверстие со вставленной и закрепленной в нем осью с буртом 119, выступающий конец которой, проходя через отверстие в площадке 103, закрепленной в вырезе вала 102, образует шарнирное соединение, в котором для устранения люфта между трущимися поверхностями на оси 119 имеется пружина 120, которая опирается на бурт тарелки 121, надетой на ось 119 и центрующей пружину 120 по внутреннему диаметру. В сжатом состоянии пружину 120 удерживает крышка 122, которая фиксируется стопорным кольцом 123. Для предотвращения увеличения зазора при наклоне РУС в положение «на себя», что могло бы нарушить работу датчика элеронов, под крышку 122 поставлена ограничительная втулка 124, центрируемая крышкой 122 с одной стороны, и тарелкой 121 с другой. Ось 119, закрепленная на качающейся платформе 104, со стороны бурта имеет осевое резьбовое отверстие для крепления прижимной планки 125 основания 126 датчика элеронов 98. Отверстие под цапфу основания 126 датчика элеронов 98 в качающейся платформе 104 расположено на оси симметрии последней и выше ее оси вращения. Кронштейн 127 неподвижно закреплен на валу 102 датчика руля высоты, при этом ось 128 на его консоли расположена выше вала 129 потенциометра 98, параллельна ему и сопряжена с пазом поводка 130, насаженного на вал потенциометра 98. Принцип действия механизма датчика элеронов 98 такой же, как у датчика педалей. Нижняя часть качающейся платформы 104 имеет два скоса, каждый из которых в своем крайнем положении упирается в вал 102 датчика руля высоты вдоль его образующей, что обеспечивает отклонение ручки РУС 89 вправо/влево на 15°.
В верхней части качающейся платформы 104 расположена ниша 131 для крепления ручки 89 РУС. В ней нижний конец ручки 89 фиксируется с помощью прижимной планки 132 и винта с гайкой (не показаны).
Ручка 89 РУС выполнена в виде полимерной трубы, изогнутой в двух местах таким образом, чтобы кресло пользователя не препятствовало максимальному его отклонению в положение «на себя». Все выпускаемые в настоящее время игровые манипуляторы для управления виртуальным самолетом настольные и ввиду малой высоты рычагов имеют малую амплитуду их отклонения, следствием чего является недостаточная точность в управлении самолетом, выраженная в увеличении количества управляющих движений, например, при прицеливании, или при заходе на посадку. Полноразмерная ручка управления самолетом 89, укрепленная на педалях 1, при том же угле отклонения (±15°), что и у джойстиков, позволяет расширить диапазон управления, что делает результат управляющего движения более предсказуемым. Кроме того, педали 1 с установленными на них РУС 89, образуют единый комплекс управления рулевыми плоскостями, что при использовании добавляет ощущение нахождения пользователя в кабине самолета и обеспечивает расширение функциональных возможностей силового устройства и повышает его реалистичность. Установленная на педалях 1 РУС 89 занимает немного места, т.к. ориентирована по вертикали (см. фиг.7).
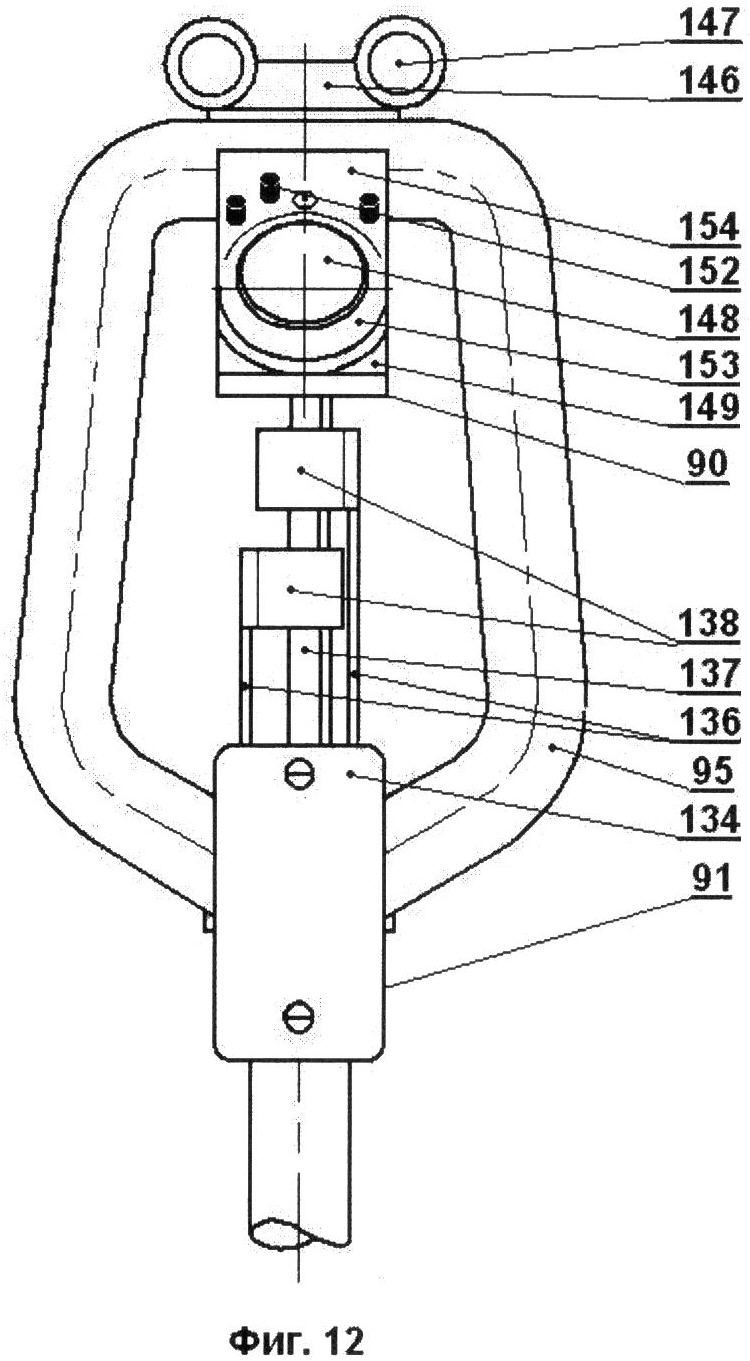
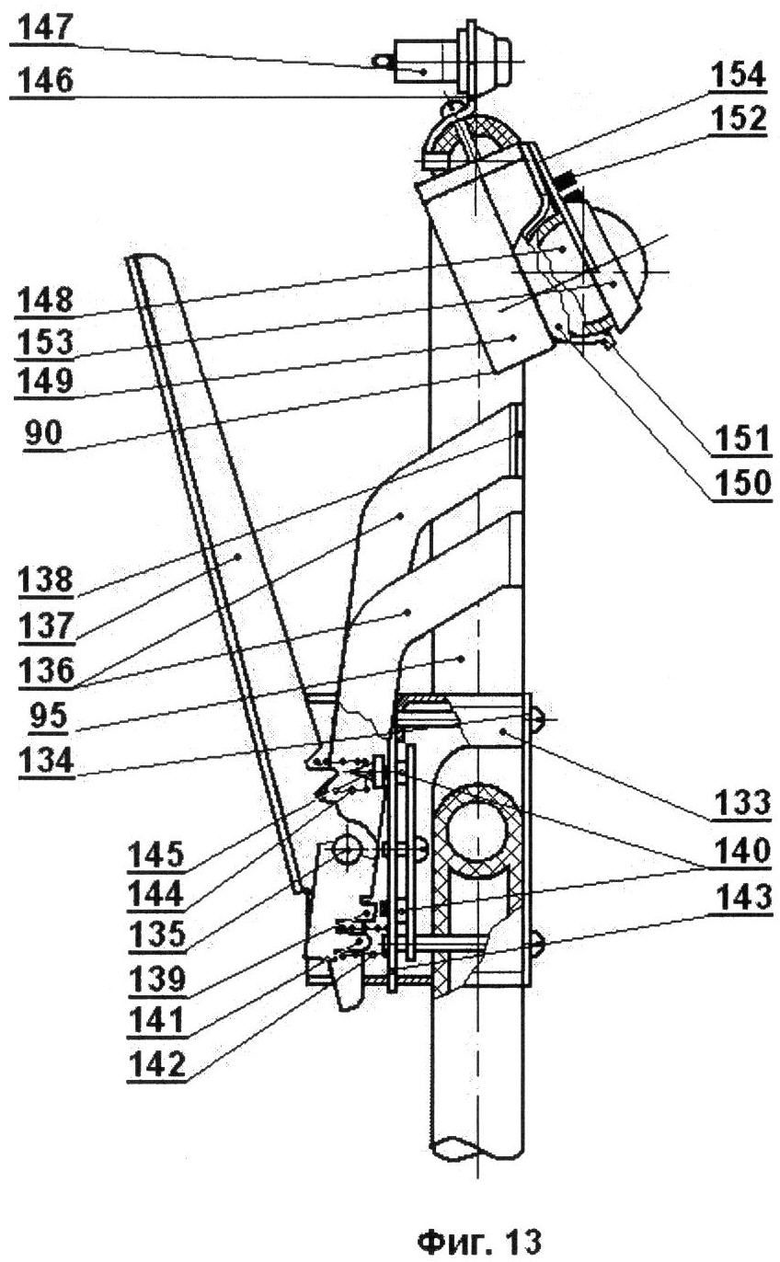
Сверху ручка 89 (см. фиг.12, 13) заканчивается рукояткой 95, выполненной в виде кольца с прямолинейными боковыми и верхним участками (или иной формы, например в виде эллипса, вытянутого по вертикали), стилизованной под РУС самолетов советской истребительной и штурмовой авиации времен второй мировой войны и выполненным из того же материала, что и ручка 89. На место соединения ручки 89 и рукоятки 95 Y-образной формы вставляется коробка 133, в трех стенках которой имеются соответствующие вырезы. Спереди коробка 133 фиксируется крышкой 134. Сзади через боковые стенки коробки 133 проходит ось 135, на которой насажены три рычага 136, 137, разделенных на оси 135 втулками (не показаны) и выходящими наружу длинными плечами: два рычага 136 расположены внутри кольца рукоятки 95 РУС, третий 137 отклонен назад. Два рычага 136 кнопок оружия - плоские, выполнены разной длины с тем, чтобы их отогнутые во внутрь под углом 90° нажимные площадки 138 располагались одна над другой в плоскости рукоятки 95 РУС. Короткое плечо обоих рычагов 136 одинаковое, заканчивается внутри коробки 133 нажимной полочкой 139, которой рычаг 136 при повороте нажимает на шток микровыключателя 140, и шипом 141, на который насажена пружина 142, упирающаяся в поверхность перегородки 143, закрепленной внутри коробки 133, через отверстия в которой проходят штоки трех микровыключателей 140. При нажатии большим пальцем правой или левой руки на одну из площадок 138 происходит поворот рычага 136 вокруг оси 135, и нажатие на шток соответствующего микровыключателя 140 производит выстрел оружия. Третий рычаг 137 управляет колесным тормозом виртуального самолета и для усиления имеет ребро жесткости, т.к. может быть прижат несколькими пальцами. Короткое его плечо перемещается в пазу, расположенном на нижней поверхности коробки 133, не позволяющем отклоняться рычагу 137 от плоскости его вращения. Нажатие на кнопку микровыключателя 140 рычага 137 производится пружиной 144, которая, достигнув площадки колпачка 145 штока микровыключателя 140, сначала замыкает его цепь, а после контакта тыльной стороны колпачка 145 с перегородкой 143 начинается ее сжатие для создания ощущения сопротивление рычага, что повышает реалистичность управления рычагом тормоза. Рычаг тормоза 137 при любом отклонении РУС под действием силы тяжести длинного плеча находится в отклоненном положении. На верхнем участке рукоятки РУС 95 размещен кронштейн 146 с двумя кнопками оружия 147, а под ним указатель вида 90.
Указатель вида 90 создан на базе стандартной оптической мыши, при этом необходимо было заменить ровную поверхность, способную отражать свет, излучаемый светодиодом мыши, по которой мышь должна перемещаться, объектом, который при той же отражающей способности все время находился бы в одном месте и которым можно было бы управлять при помощи одного пальца без отрыва руки от рукоятки РУС 95. Таким объектом стала пустотелая сфера 148, которая может быть выполнена из прозрачного полимера (например, полистирола или органического стекла), матовая внутренняя поверхность которой отстоит от концентрирующей линзы фотоприемника оптической мыши на расстоянии, определяемом толщиной стенки сферы 148 (например, 3 мм), и обеспечивающим фокусировку света на фотоприемнике. Свет, излучаемый светодиодом мыши, проходя сквозь наружный прозрачный слой материала, сначала отражается от внутренней матовой поверхности, а затем, уже под другим углом, от наружной поверхности, и так, многократно отражаясь от обеих поверхностей, засвечивается большая площадь поверхности сферы, а значит, отраженный свет гарантированно попадает в фотоприемник, который при вращении сферы воспринимает это, как перемещение по ровной поверхности. Доработанная печатная плата оптической мыши помещена в пластмассовый корпус 149, к которому со стороны рассеивающей линзы излучателя и концентрирующей линзы фотоприемника прикреплена полусферическая ниша 150, с фланцем 151, в котором размешены три микровыключателя 152, проводниками связанные с платой (не показано). В основании ниши 150 и крышке корпуса 149 под ней имеется отверстие для излучателя и фотоприемника. Сфера 148, вложенная в нишу 150, центруется и удерживается в ней крышкой 153, выполненной в виде усеченной сферы для доступа к поверхности сферы 148 на фланце 154. Кнопки микровыключателей 152 располагаются чуть выше сферы 148, одна справа и две слева, которые, как и кнопки мыши, могут быть запрограммированы в игре на команды, связанные с навигацией (вызов на экран карты) и управлением взглядом, например: правая для команды «взгляд вперед», при этом, повернув сферу и осматривая «заднюю полусферу» на экране монитора, можно быстро вернуться к «взгляду вперед», сместив большой палец со сферы на кнопку. Вращая сферу 148, можно добиться не только нужного вида, который бы оставался на экране до нового движения сферы 148, но и по своему желанию оперативно осматривать на экране любое доступное для этого место. Данная конструкция объединяет в себе компактность и удобство расположения 8-ми позиционного переключателя видов (hat), с точностью наведения и скоростью перемещения компьютерной мыши, что решает в игре проблему недостаточности контроля окружающей обстановки.
Указатель вида 90 крепится в специальной нише на горизонтальном участке рукоятки РУС 95, с небольшим наклоном относительно плоскости рукоятки РУС 95, обеспечивающим удобство управления указателем вида 90 при максимальном наклоне РУС в положение «на себя». Указатель вида 90 подключается к ПК как мышь, при помощи отдельного USB шнура.
При использовании устройства с РУС для повышения удобств пользователей при игре лучше крепить РУД 3 к компьютерному креслу с помощью специально разработанного для этих целей кронштейна. Кронштейн 92 предназначен для крепления РУД 3 к компьютерному креслу 93 вместо подлокотника справа или слева от пользователя. Это обеспечивает удобство пользователей при игре без приобретения ими специального кресла для авиасимулятора.
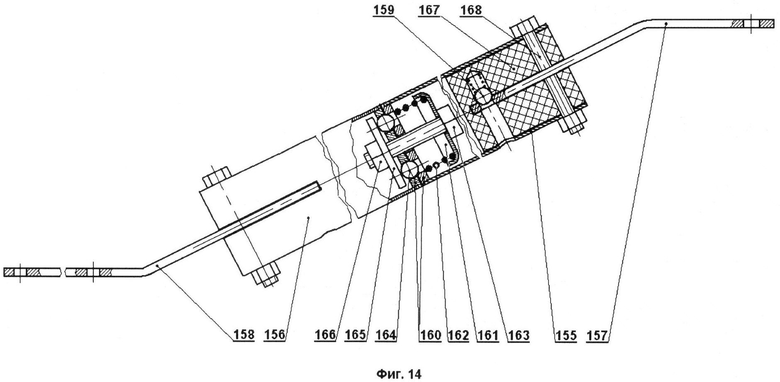
Кронштейн 92 имеет трубчатое тело (см. фиг.14), разделенное на две части, выполненные в виде стаканов 155, 156 с возможностью их поворота относительно друг друга и с автоматической фиксацией в новом положении, что обеспечивает правильную ориентацию корпуса с РУД 3 при правом или левом его размещении. Кронштейн 92 с обеих сторон имеет поворачиваемые и автоматически фиксирующиеся в рабочих и нерабочих положениях (нерабочих - когда кронштейн с РУД или без него развернут назад, вдоль боковой стороны сиденья, а сам РУД находится сзади за спинкой кресла) площадки: для соединения с РУД площадка 157, а для крепления кронштейна 92 к креслу 93 - площадка 158. Для их фиксации используются шариковые фиксаторы 159. Каждый стакан 155 и 156 имеет донца 160 со своим набором отверстий. В стакане 155 имеется крышка 161, удерживающая и центрующая пружину 162 по наружному ее диаметру на болте 163, другой конец пружины упирается в донце 160. При вворачивании болта 163 в донце другого стакана 156 увеличивается сжатие пружины 162, а значит, и сила сжатия стаканов донцами. Со стороны стакана 156 в соответствующие отверстия вставлены два стальных шарика 164, которые удерживаются в них с помощью стальной шайбы 165, надетой на выступающий резьбовой конец болта 163 и зафиксированной на нем гайкой 166. Эта шайба 165 частично выдавливает шарики 164 в плоскость разъема стаканов, и если под ними в этот момент имеется одна из двух пар отверстий донца другого стакана - то они в них частично западают, фиксируя таким образом стаканы относительно друг друга. Аналогичным образом осуществляется фиксация кронштейна 92 в другом положении. Внутри обоих стаканов 155 и 156 размещены одинаковые цилиндрические вставки 167, выполненные, например, из капролона, прорезь в которых совмещается с прорезями в стенках стаканов. Вставка 167 имеет глухое отверстие в глубине прорези и перпендикулярное ей, в котором размещен шариковый фиксатор 159. В прорезях с возможностью поворота вокруг оси 168 вставлены: со стороны стакана 156 - площадка 158 крепления кронштейна к креслу, а со стороны стакана 155 - площадка 157 для фиксации устройства РУД 3, обе с отогнутыми участками, выполненные с различными наборами отверстий, обеспечивающими фиксацию корпуса с РУД 3 как в рабочем положении, позволяющем ориентировать корпус с РУД 3 наилучшим образом как с точки зрения эргономики при игре, так и по завершению работы с ним после окончания игры без его демонтажа.
При использовании силового устройства по второму независимому пункту формулы для улучшения доступа пользователя к клавиатуре, на которую в игре назначается большинство команд, изделие может комплектоваться двумя одинаковыми специально разработанными струбцинами оригинальной конструкции (не показаны), позволяющими устанавливать клавиатуру ПК почти фронтально к виртуальному пилоту, с небольшим наклоном сверху от него. Струбцины крепятся с торца к горизонтальной поверхности стола, имеют закрепленные винтами полки (куда вкладывается клавиатура), для регулировки по высоте, захвата и фиксации клавиатуры они снабжены выдвижными стержнями, загнутыми сверху. Возможен и другой вариант использования струбцин, когда обе струбцины, шарнирно связанные специальным кронштейном, выполненным с возможностью перелома в его средней части, являются платформой для крепления «кокпита» - приборной доски самолета, состоящей из двух частей с целью уменьшения ее размера при транспортировке, стилизованной под кокпит самолета и снабженной такими элементами управления, как тумблеры, потенциометры, выключатели и т.п., которые в игре программируются на соответствующие команды, обычно назначаемые на клавиатуру.
Выполнение каждой педали с подвижной тормозной площадкой, поворачивающейся вокруг цапф в пределах вырезов в щеках дуги, выполненной с боковыми отогнутыми вверх буртами и свободным концом опирающейся на пружину обеспечивает расширение функциональных возможностей устройства, удобство пользования ими в процессе игры и предотвращает травмирование ступни пользователя.
Выполнение поворотной балки Г-образного сечения, установленной на опорном подшипнике, смонтированной в опрорной плите и имеющей ухо для соединения со штоком вытяжного типа силового цилиндра возвратного механизма обеспечивает повышение точности управления виртуальным самолетом и технологичности изготовления.
Выполнение опорной плиты в виде Т-образного основания с ребрами жесткости, на консоли поперечины которой имеется ухо для крепления силового цилиндра возвратного механизма, обеспечивает удобство пользования педалями в процессе игры, плита является ограничителем при постановке педалей под столом и предотвращает его повреждение.
Выполнение датчика отклонения педалей в виде потенциометра, корпус которого закреплен в платформе, установленной на тяге справа или слева от оси вращения, на валу потенциометра насажен поводок, пазом сопряженный со стержнем кронштейна, закрепленным на неподвижной оси вращения тяги, обеспечивает повышение точности управления виртуальным самолетом.
Заявленное конструктивное исполнение устройства РУД обеспечивает расширение функциональных возможностей силового устройства с повышением реалистичности, а также удобство пользования ими в процессе игры и повышение точности управления виртуальным самолетом.
Выполнение в основании корпуса РУД узла фиксации обеспечивает удобство пользования устройством РУД в процессе игры за счет крепления его струбциной к столу в 1-м варианте исполнения, и возможность крепления РУД кронштейном на любое стандартное компьютерное кресло вместо одного из боковых подлокотников во втором варианте исполнения.
Заявленное конструктивное исполнение РУС обеспечивает расширение функциональных возможностей силового устройства с повышением реалистичности, удобств пользования им в процессе игры.
Использование изобретения по первому варианту исполнения (первому независимому пункту формулы) осуществляется аналогично использованию ближайшего аналога: педали 1 устанавливаются под столом 169, РУД 3 струбциной 170 крепится к столу, подключение к компьютеру осуществляется через джойстик (не показан).
Использование изобретения по второму варианту исполнения (второму независимому пункту формулы) осуществляется следующим образом.
РУС 89 крепится на основании 7 педалей 1 (см. фиг.11). При этом для обеспечения доступа к клавиатуре (см. фиг.6) на столе 169 устанавливаются две струбцины 170 оригинальной конструкции, фиксируемые на краю стола одним движением, позволяющие ставить клавиатуру почти фронтально с небольшим наклоном для удобства пользователя. При креплении устройства 3 к компьютерному креслу 93 на нем снимается один из подлокотников, и на его место устанавливается кронштейн 92, на который затем насаживается устройство РУД 3 гнездом разъема узла фиксации 84 до фиксации шариковым фиксатором 87. В коробку коммутации и переключения режимов 2 педалей 1 подключаются РУС 89 и устройство РУД 3 при помощи соответствующих шнуров с разъемами, которая через USB-контроллер 94 подключается непосредственно к ПК. С помощью переключателей режимов коробки 2 устройство 3 настраивается на одномоторный режим (одна ручка-газ, другая - шаг винта), двухмоторный или многомоторный режимы (управление одновременно всеми двигателями).
Пользователь-игрок, сидя в компьютерном кресле 93 и поставив ноги на педали 1, имеет возможность управлять рулем направления, выдвигая вперед правую или левую ногу, а нажимая на тормозные площадки 9 правой или левой педали 8 при рулении - производить разворот самолета практически на месте. Если корпус РУД 3 установлен слева, то рукоятки 4-6 располагаются в трех уровнях за счет подъема блока РУД относительно корпуса и отогнутой рукоятки управления шасси 5, при этом все рукоятки одинаково доступны пользователю. Блок РУД 3 для удобства доступа к рукояткам 4-6 и манипулирования ими поднимается, если его корпус крепится слева от пользователя, и опускается - если справа. Рукоятками 4-6 РУД 3 можно управлять раздельно двумя двигателями в двух моторных самолетах, одним двигателем и шагом винта в одномоторных и левой группой и правой раздельно в многомоторных. Рукояткой управления закрылками 4 можно последовательно изменять их позиции: убраны-боевая позиция-взлет-посадка и в обратной последовательности, а можно самому выбирать нужный в данный момент угол выпуска, если действие назначено на соответствующую ось. Рукоятка 5 может находиться только в двух положениях: шасси выпущены - рукоятка в положении от себя, и убраны - на себя. По завершению игры РУД 3 можно отключить от педалей 1 и вместе с кронштейном 92 развернуть назад за спинку, не демонтируя устройство с кресла 93. Кольцеобразную рукоятку 95 РУС игрок может держать как двумя руками, при этом управляя гашетками, кнопками 147 и указателем вида 90, не отрывая рук от рукоятки 95 при помощи больших пальцев, так и одной рукой, при этом другая может лежать, например, на рукоятках 4-6 РУД. Нажатие на рычаг ручного тормоза 137 производит одновременное торможение обоих колес шасси. Ручка 89 РУС обладает большой амплитудой перемещения и позволяет выполнять даже незначительные отклонения, которые в случае управления самолетом с помощью джойстика были бы незаметны. При отклонении ручки 89 РУС в положение «на себя» она оказывает сопротивление, а при отпускании РУС ручка 89 сама уходит в положение пикирования, что наблюдалось на большинстве самолетов времен войны. При отклонении РУС 89 на игрока самолет задирает нос, при отклонении в другую сторону - опускает. При наклоне РУС 89 вправо самолет кренится вправо, если ручку оставить в этом положении - самолет начнет вращаться вокруг продольной оси. То же происходит при наклоне РУС 89 влево.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРСОНАЛЬНЫЙ ВИРТУАЛЬНЫЙ ТРЕНАЖЕР ЛЕТЧИКА | 2006 |
|
RU2361281C2 |
| СВЕРХЛЕГКИЙ САМОЛЕТ | 2005 |
|
RU2336200C2 |
| СПОРТИВНО-ПИЛОТАЖНЫЙ САМОЛЕТ | 1992 |
|
RU2005662C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| САМОЛЕТ ДЛЯ ПОСАДКИ ПРИ БОКОВОМ ВЕТРЕ (ВАРИАНТЫ) | 2008 |
|
RU2400398C2 |
| СПОСОБ ЗАГРУЗКИ ПЕДАЛИ НОЖНОГО ПОСТА СИСТЕМЫ УПРАВЛЕНИЯ ТОРМОЗАМИ САМОЛЕТА И ПЕДАЛЬНЫЙ УЗЕЛ НОЖНОГО ПОСТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2524808C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |


Изобретение относится к устройствам ввода команд в ПК и может быть использовано в компьютерных играх для управления полетом виртуального самолета. Технический результат заключается в расширении функциональных возможностей силового устройства с повышением реалистичности, удобств пользования им в процессе игры и точности управления виртуальным самолетом, а также в повышении технологичности изготовления устройства. Силовое устройство к компьютеру для управления виртуальным самолетом включает устройство с рукоятками управления двигателем и закрылками и педали для управления рулем направления виртуального самолета с датчиком их отклонения и дугами для фиксации ног, подвижно соединенными с консолями тяги и установленными на поворотной балке, соединенной с возвратным механизмом и подвижно закрепленной на платформе со смонтированной на ней тягой педалей, причем платформа установлена на опорной плите; рукоятки управления газом и закрылками выполнены с возможностью поворота относительно оси их крепления. Каждая педаль выполнена с подвижной тормозной площадкой, поворачивающейся вокруг цапф в пределах вырезов в щеках дуги, выполненной с боковыми отогнутыми вверх буртами и свободным концом опирающейся на пружину, установленную в самоустанавливающуюся тарелку. Поворотная балка выполнена Г-образного сечения, установлена на опорном подшипнике, смонтированном в опорной плите и имеет ухо для соединения со штоком вытяжного типа силового цилиндра возвратного механизма. Опорная плита выполнена в виде Т-образного основания с ребрами жесткости, на консоли поперечины которой имеется ухо для крепления силового цилиндра возвратного механизма. Датчик отклонения педалей представляет собой потенциометр, корпус которого закреплен в платформе, установленной на тяге справа или слева от оси вращения, на валу потенциометра насажен поводок, пазом сопряженный со стержнем кронштейна, закрепленным на неподвижной оси вращения тяги. Устройство с рукоятками управления двигателями, закрылками и шасси (РУД) представляет собой корпус, состоящий из основания с отогнутыми вверх участками, передним и задним, и левой стенки, с наружной стороны которой на оси поворота закреплен блок рукояток управления двигателями, выполненный с возможностью регулировки их по высоте, с перегородкой и двумя рукоятками, на общей неподвижной оси в которой закреплены валы их потенциометров, корпуса которых связаны с соответствующими рукоятками, параллельно левой стенке на основании установлена другая перегородка, с одной стороны которой размещена четырехпозиционная рукоятка закрылков с зубчатым венцом, взаимодействующим с лепестком узла микровыключателей, на оси которой с другой стороны насажена с возможностью поворота и перекоса относительно этой оси рукоятка управления шасси, перемещаемая по вырезу в наклонной П-образной рамке, и пружина, установленная на этой же оси и прижимающая обе рукоятки к перегородке, каждая из рукояток имеет механизм отдачи, в основании корпуса РУД выполнен узел фиксации, представляющий собой прямоугольный вырез внизу основания корпуса, переходящий спереди в окно с закрепленным внутри корпуса по диагонали над вырезом шариковым фиксатором. 2 н. и 6 з.п. ф-лы, 14 ил.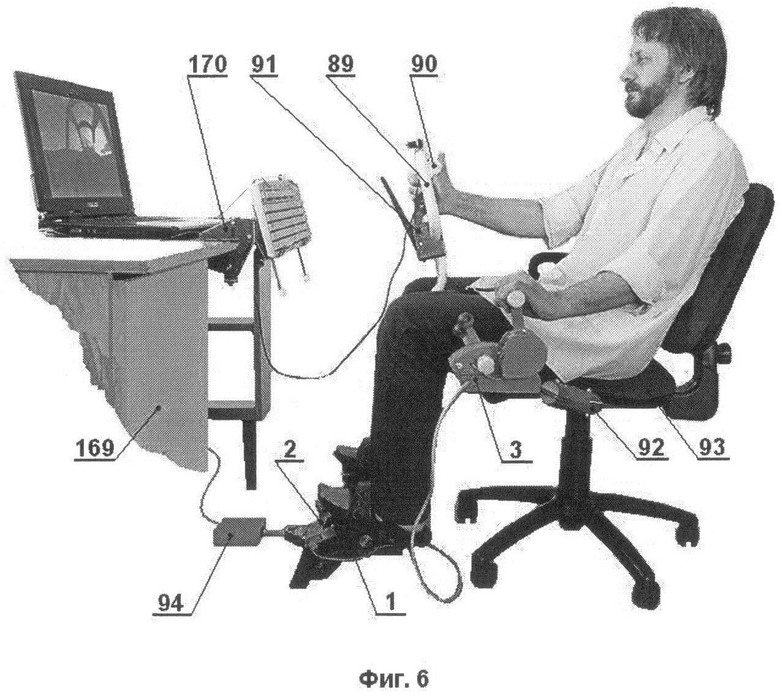
1. Силовое устройство к компьютеру для управления виртуальным самолетом, включающее устройство с рукоятками управления двигателем и закрылками и педали для управления рулем направления виртуального самолета с датчиком их отклонения и дугами для фиксации ног, подвижно соединенными с консолями тяги и установленными на поворотной балке, соединенной с возвратным механизмом и подвижно закрепленной на платформе со смонтированной на ней тягой педалей, причем платформа установлена на опорной плите; рукоятки управления газом и закрылками выполнены с возможностью поворота относительно оси их крепления, отличающееся тем, что каждая педаль выполнена с подвижной тормозной площадкой, поворачивающейся вокруг цапф в пределах вырезов в щеках дуги, выполненной с боковыми отогнутыми вверх буртами и свободным концом опирающейся на пружину, установленную в самоустанавливающуюся тарелку; поворотная балка выполнена Г-образного сечения, установлена на опорном подшипнике, смонтированном в опорной плите, и имеет ухо для соединения со штоком вытяжного типа силового цилиндра возвратного механизма; опорная плита выполнена в виде Т-образного основания с ребрами жесткости, на консоли поперечины которой имеется ухо для крепления силового цилиндра возвратного механизма; датчик отклонения педалей представляет собой потенциометр, корпус которого закреплен в платформе, установленной на тяге справа или слева от оси вращения, на валу потенциометра насажен поводок, пазом сопряженный со стержнем кронштейна, закрепленным на неподвижной оси вращения тяги; устройство с рукоятками управления двигателями, закрылками и шасси (РУД) представляет собой корпус, состоящий из основания с отогнутыми вверх участками, передним и задним, и левой стенки, с наружной стороны которой на оси поворота закреплен блок рукояток управления двигателями, выполненный с возможностью регулировки их по высоте, с перегородкой и двумя рукоятками, на общей неподвижной оси, в которой закреплены валы их потенциометров, корпуса которых связаны с соответствующими рукоятками, параллельно левой стенке на основании установлена другая перегородка, с одной стороны которой размещена четырехпозиционная рукоятка закрылков с зубчатым венцом, взаимодействующим с лепестком узла микровыключателей, на оси которой с другой стороны насажена с возможностью поворота и перекоса относительно этой оси рукоятка управления шасси, перемещаемая по вырезу в наклонной П-образной рамке, и пружина, установленная на этой же оси и прижимающая обе рукоятки к перегородке, каждая из рукояток имеет механизм отдачи, в основании корпуса РУД выполнен узел фиксации, представляющий собой прямоугольный вырез внизу основания корпуса, переходящий спереди в окно с закрепленным внутри корпуса по диагонали над вырезом шариковым фиксатором.
2. Силовое устройство по п.1, отличающееся тем, что возвратный механизм педалей выполнен в виде цилиндра с крышкой, открытого со стороны крепления к уху консоли поперечины основания и связанного с ухом двухступенчатым пальцем, проходящим через стенки цилиндра, при этом ухо расположено между уступом пальца и вырезом в стенке цилиндра, через отверстие в крышке проходит шток с резьбой на одном конце и диском на другом, между диском и крышкой размещена пружина сжатия.
3. Силовое устройство к компьютеру для управления виртуальным самолетом, включающее устройство с рукоятками управления двигателем и закрылками и педали для управления рулем направления виртуального самолета с датчиком их отклонения и дугами для фиксации ног, подвижно соединенными с консолями тяги и установленными на поворотной балке, соединенной с возвратным механизмом и подвижно закрепленной на платформе со смонтированной на ней тягой педалей, причем платформа установлена на опорной плите; рукоятки управления газом и закрылками выполнены с возможностью поворота относительно оси их крепления, отличающееся тем, что каждая педаль выполнена с подвижной тормозной площадкой, поворачивающейся вокруг цапф в пределах вырезов в щеках дуги, выполненной с боковыми отогнутыми вверх буртами и свободным концом опирающейся на пружину, установленную в самоустанавливающуюся тарелку; поворотная балка выполнена Г-образного сечения, установлена на опорном подшипнике, смонтированном в опорной плите, и имеет ухо для соединения со штоком вытяжного типа силового цилиндра возвратного механизма; опорная плита представляет собой Т-образное основание с ребрами жесткости, на консоли поперечины которой имеется ухо для крепления силового цилиндра возвратного механизма; датчик отклонения педалей представляет собой потенциометр, корпус которого закреплен в платформе, установленной на тяге справа или слева от оси вращения, на валу потенциометра насажен поводок, пазом сопряженный со стержнем кронштейна, закрепленным на неподвижной оси вращения тяги; устройство с рукоятками управления двигателями, закрылками и шасси (РУД) представляет собой корпус, состоящий из основания с отогнутыми вверх участками, передним и задним, и левой стенки, с наружной стороны которой на оси поворота закреплен блок рукояток управления двигателями, выполненный с возможностью регулировки их по высоте, с перегородкой и двумя рукоятками, на общей неподвижной оси, в которой закреплены валы их потенциометров, корпуса которых связаны с соответствующими рукоятками, параллельно левой стенке на основании установлена другая перегородка, с одной стороны которой размещена четырехпозиционная рукоятка закрылков с зубчатым венцом, взаимодействующим с лепестком узла микровыключателей, на оси которой с другой стороны насажена с возможностью поворота и перекоса относительно этой оси рукоятка управления шасси, перемещаемая по вырезу в наклонной П-образной рамке, и пружина, установленная на этой же оси и прижимающая обе рукоятки к перегородке, каждая из рукояток имеет механизм отдачи, в основании корпуса РУД выполнен узел фиксации, представляющий собой прямоугольный вырез внизу основания корпуса, переходящий спереди в окно с закрепленным внутри корпуса по диагонали над вырезом шариковым фиксатором; силовое устройство дополнительно содержит ручку управления самолетом (РУС), установленную на узел датчиков руля высоты и элеронов, представляющий собой съемную платформу РУС с отогнутыми вверх под прямыми углами щеками, в которых имеются отверстия под вал, выполненный с вырезом под площадку для установки на ней качающейся платформы датчика элеронов, выполненной с двумя скосами в нижней части, которыми она в крайних положениях упирается в вал руля высоты вдоль его образующей и ограничивает отклонение РУС, корпус датчика руля высоты связан со щекой съемной платформы РУС, а его вал закреплен в отверстии в торце вала руля высоты, датчик элеронов выполнен рычажного типа, закреплен на качающейся платформе и имеет поводок, сопряженный с кронштейном, неподвижно закрепленным на валу руля высоты, на другом торце вала руля высоты размещен рычаг, выполненный с двумя скосами, определяющими его крайние положения, и связанный с штоком вытяжного типа цилиндра возвратного механизма РУС, удерживающего РУС в отклоненном от пользователя положении, РУС закреплена в передней части основания педалей и оканчивается кольцеобразной рукояткой, в нижней части которой размещена коробка с рычагами кнопок управления вооружением самолета и рычагом ручного тормоза, в верхней части закреплен указатель вида, содержащий пластмассовый корпус с печатной платой, излучателем и фотоприемником оптической мыши, к корпусу прикреплена полусферическая ниша с фланцем, в котором установлены микровыключатели, соединенные с печатной платой, в нише размещена пустотелая сфера из прозрачного полимера с матовой внутренней поверхностью, закрытая крышкой в виде усеченной сферы и отстоящая от фотоприемника на определенном расстоянии в зависимости от толщины стенки сферы и обеспечивающим фокусировку света на фотоприемнике; в узле фиксации основания корпуса РУД установлен кронштейн, представляющий собой трубчатое тело, состоящее из двух частей в виде стаканов, соединенных донцами и выполненных с возможностью их поворота относительно друг друга и с узлом автоматической их фиксации в новом положении, стаканы имеют одинаковые цилиндрические вставки с прорезями, в которых установлены площадки, выполненные с возможностью их поворота и с автоматической фиксацией шариковыми фиксаторами, размещенными во вставке у конца прорези.
4. Силовое устройство по п.3, отличающееся тем, что возвратный механизм педалей выполнен в виде цилиндра с крышкой, открытого со стороны крепления к уху консоли поперечины основания и связанного с ухом двухступенчатым пальцем, проходящим через стенки цилиндра, при этом ухо расположено между уступом пальца и вырезом в стенке цилиндра, через отверстие в крышке проходит шток с резьбой на одном конце и диском на другом, между диском и крышкой размещена пружина сжатия.
5. Силовое устройство по п.3, отличающееся тем, что механизм отдачи рукоятки закрылков представляет собой U-образную скобу с двумя кнопками и пружиной между ними, с которыми в крайних положениях контактирует своими отогнутыми участками рукоятка закрылков; механизм отдачи рукоятки шасси представляет собой П-образную рамку, боковые участки которой, имеющие крутой профиль, обеспечивают возможность соскальзывания рукоятки под действием пружины, надетой на ось рукоятки.
6. Силовое устройство по п.3 или 5, отличающееся тем, что возвратный механизм РУС выполнен в виде силового цилиндра, открытого со стороны крепления его к уху на щеке платформы РУС, размещенному внутри цилиндра, для чего в стенке цилиндра выполнен соответствующий вырез, и связанного с ухом пальцем, проходящим сквозь стенки цилиндра.
7. Силовое устройство по п.3 или 5, отличающееся тем, что ручка РУС выполнена в виде изогнутой полимерной трубы, рукоятка выполнена в виде кольца с прямолинейными боковыми и верхним участками или в виде эллипса, вытянутого по вертикали.
8. Силовое устройство по п.3 или 5, отличающееся тем, что узел автоматической фиксации стаканов кронштейна относительно друг друга представляет собой размещенную в донце одного стакана пружину, удерживаемую и центрируемую крышкой с болтом, ввернутым в донце другого стакана и зафиксированным в нем гайкой с шайбой, контактирующей с двумя стальными шариками, вставленными в отверстия донца данного стакана, которые сопрягаются с отверстиями в донце первого стакана при их повороте для фиксации в новом положении.
| Высевающий аппарат | 1940 |
|
SU60871A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2388040C2 |
| Механический выпрямитель трехфазного тока | 1930 |
|
SU29901A1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| US 7976433 B2, 12.07.2011 | |||
| US 2010279255 A1, 04.11.2010. | |||

