(5) устройстео ДЛЯ ДИФФЕРЕНЦИРОВАНИЯ
МЕДЛЕНН&ГИЗМЕНЯЮЩЙХСЯ СИГНАЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171995C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2226695C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449293C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2189047C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| Устройство синхронизации электроразведочных приемников | 1987 |
|
SU1449961A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2189046C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| Акселерометр | 2017 |
|
RU2653140C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171994C1 |
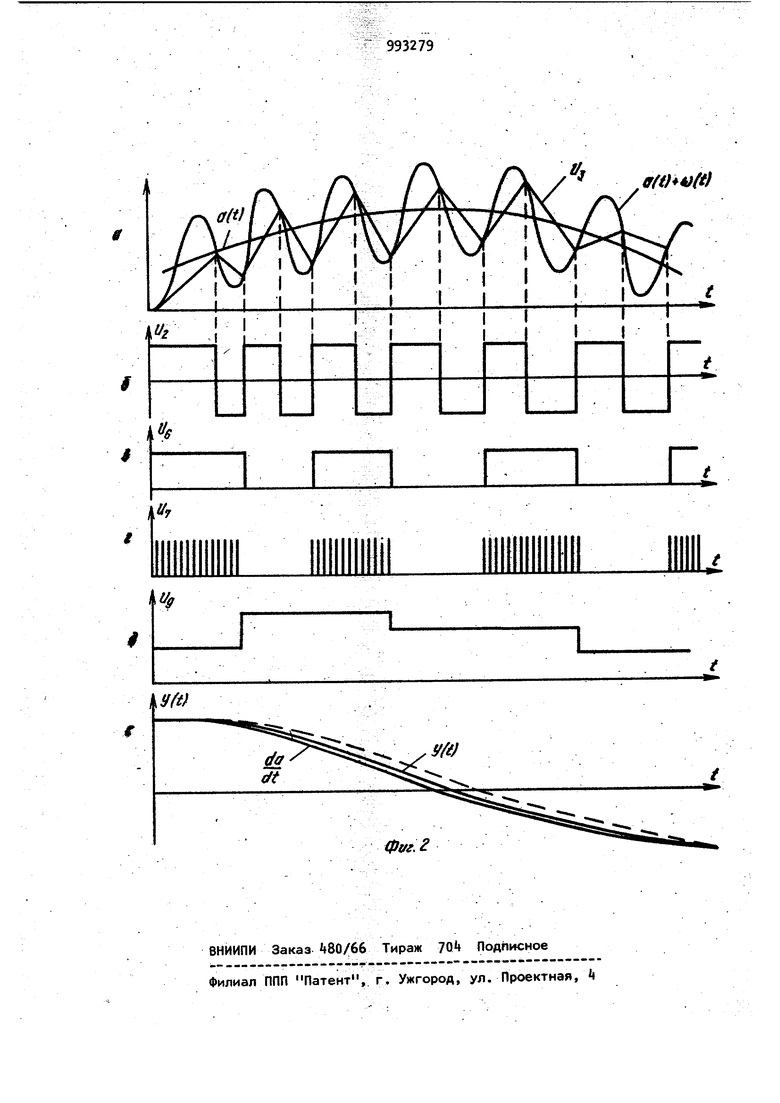
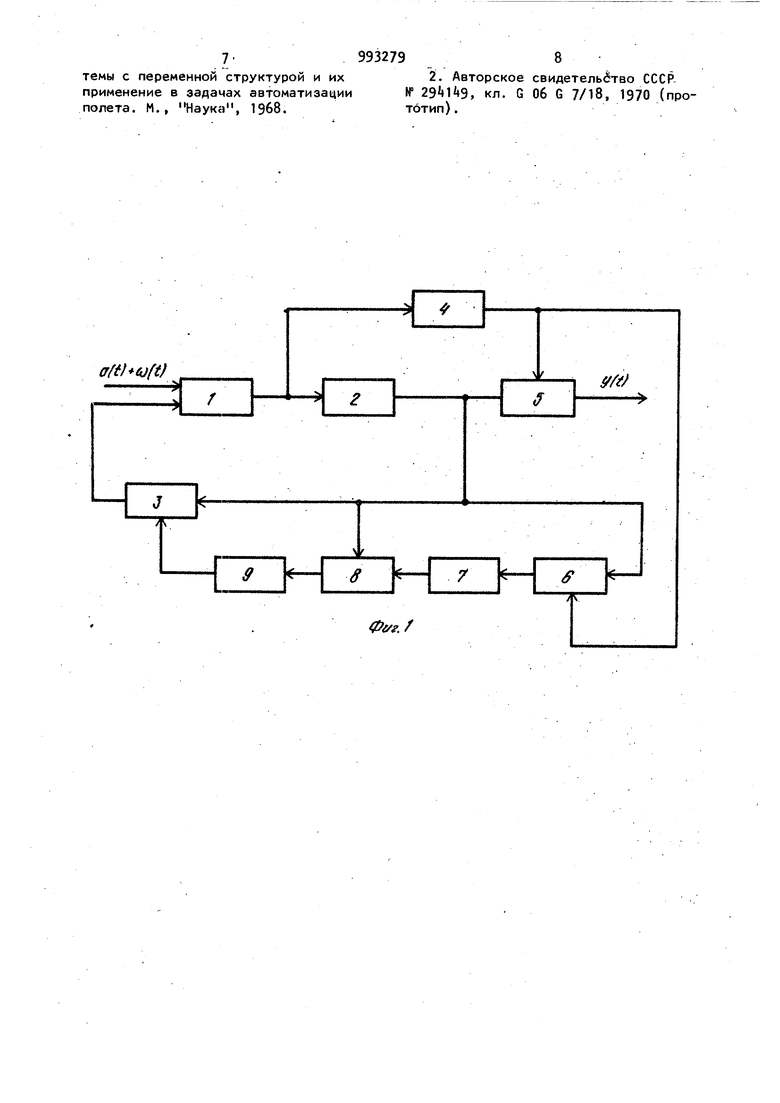
Изобретение относится к аналогово вычислительной технике. Известны аналогичные устройства, построенные на основе автоколебатель ных замкнутых контуров с интегрирующей обратной связью, одно из которых содержит элемент сравнения, релейный элемент и инteгpaтop, образующие релаксационный генератор, и сглаживающий фильтр, подключенный к нему СИНедостаток устройства - низкая точность дифференцирования, обусловленна;и срывом скользящего режима автоколебаний под воздействием помехи. Наиболее близким по технической сущности к предлагаемому является устройстбо, содержащее дифференцирую щий релаксационный контур и сглаживающий фильтр, имеющий регулируемую (переключаемую) постоянную времени, который управляется блоком управляющих сигналов, связанным с дифферейцирующим контуром 2 }. Недостаток известного устройства тоже состоит в невысокой точности диф-. ференцирования. Это обусловлено влиянием помех на режим колебаний и зависимостью ошибки дифференцирований от величины производной полезного сигнала и от амплитуды помехи. Цель изобретения - повышение точности дифференцирования в условиях . воздействия помех. Поставленная цель достигается тем, что устройство для дифференцирования медленно изменякмцихся сигналов, содержащее элемент сравнения,,первый вход которого является входом устройства, а Выход элемента сравнения через релейный элемент связан с информационными входами сглаживающего фильтра и интегратора, выход которого соединен с вторым входом элемента сравнения, при этом выход элемента сравнения через блок.-управляющих сигналов связан с управляющ44м входом сглаживающего 3993 фильтра, выход которого является выходом устройства, содержит последовательно соединенные триггер, ждущий мультивибратор, реверсивный счетчик и преобразователь код-аналог, выход релейного элемента подключен к первому входу триггера и к управляющему входу реверсивного счетчика, выход блока управляющих сигналов подключен к второму входу триггера, выход преобразователя код-аналог связан с входом управления коэффициентом передачи интегратора. На фиг. I представлена блок-схема устройства; на фиг. 2 - временные диаграммы сигналов. . Устройство содержит элемент 1 срав нения, релейнь)й элемент 2, интегратор 3 блок 4 управляющих сигналов, сглаживающий фильтр 5, триггер 6, ждущий мультивибратор 7 реверсивный счетчик 8, преобразователь 9 код-аналог. Уст|эойство работает следующим образом. . Полезный входной сигнал a(t) в сме си с аддитивной помехой uj(t) поступа ет на вход устройства. При отсутствии помехи в контуре возникает скользящий автоколебательный режим. При этом си1 нал ошибки близок к нулю и блок k управлявдих сигналов (выполненный, например, на основе амплитудного селектора и связанного с ним реле) своим выходным сигналом устанавливает постоянную времени сглаживающего фильтра 5 на ее меньшее значение и удерживает триггер 6 в состоянии О. Под воздействием помехи uj(t) (фиг. 2с|) в контуре релаксационного генератора происходит срыв скользяще го режима и захват колебаний контура частотой сигнала помехи. При этом блок k управляющих сигналов перек лючает постоянную времени сглаживающего фильтра 5 на большее ее значение, а на BTOpoiyi входе триггера 6 устанав ливает значение напряжения, разрешаю щее его срабатывание по первому, счет ному входу. Выходной сигнал U2 релейного элемента 2 (фяг. 25) поступает на триггер 6, запускающий передним фронтом своего выходного сигнала U (фиг. 2е ждущий мультивибратор 7- Импульсы фиксированной частоты ждущего мульти вибратора 7 (фиг. 2г) поступают на счетный вход реверсивного счетчика 8 управляющий вход которого, осуществляющий управление реверсом, подключен к выходу релейного элемента. Поэтому при положительной полярности сигнала с релейного элемента 2 реверсивный сметчик 8 работает в режиме сложения, а при отрицательной полярности U2 в режиме вычитания. Таким образом, в течение Времени измерения, определяемого состоянием 1 триггера 6, код в счетчике 8 изменится на величину, пропорциональную изменению скважности импульсов на выходе релейного элемента 2.. Код счетчика 8 при помощи преобразователя 9 преобразуется в аналоговый сигнал Ug (фиг. 2Э), поступающий на вход управления коэффициентом передачи интегратора 3Так как скважность импульсов на выходе релейного элемента 2 пропорциональна средней скорости изменения сигнала интегратора 3, то изменение скважности пропорционально отклонению средней скорости изменения выходного сигнала интегратора 3 от производной входного полезного сигнала, т. е. ошибке дифференцирования. В зависимости от величины этой ошибки, определяемой за время измерения, изменяется сигнал на выходе преобразователя 9 а следовательно, и коэффициент передачи интегратора 3 так, чтобы уменьшить ошибку дифференцирования. Пусть, например, полезный сигнал на некотором участке аппроксимируется линейно растущей функцией с неизвестной скоростью нарастания a(t) A-t, а помеха - гармонической функцией с неизвестной амплитудой u)(t) Bcosf3t. Пусть коэффициент передачи интегратора 3 равен К. Тогда средняя за период Т скорость нарастания си|- нала Ug определяется соотношением КГ.-КГ 4 -Vгде К - коэффициент передачи ратора; f - время нарастания сигнала интегратора 3; 2 время убывания сигнала. Для того, чтобы ошибка дифференцирования в указанном случае была равна нулю, необходимо, чтобы выходной сигнал Ug интегратора 3 следил за полезным сигналом a(t) с постоянной средней ошибкой д: (t)-A. Действительно, тогда v(t)| |--N): Следовательно, средняя за период ско рость нарастания сигнала U должна совпадать со скоростью нарастания по .леэного сигнала: КС. - КГ, -- т - . -1- -1 ГАв;2 2 МВ период следования импульсов мультивибратора 7; число импульсов сложения ре версивного счетчика 8; Nj - число импульсов вычитания реверсивного счетчика 8, то из последней формулы следует (f-b-N,). Уравнение относительно ошибки сле жения за линейно растущим входным си налом имеет вид к т эквивалентный коэффициент пе редачи релейного элемента 2 на гармоническую составляющую Р - оператор дифференцирования. Сопоставив два последних уравнени можно сделать вывод, что ошибка слежения не зависит ни от скорости изменения бходного полезного сигнала, ни от амплитуды помехи и постоянна по ве личине, поэтому ошибка дифференцирбвания линейно растущего полезного си нала с наложенной нанегр помехой равна нулю. . На фиг. 2е показаны точное значе ние произвс5дной входного полезного сигнала, выходная величина устройства y(t), а пунктиром показан выходной сиГнал устройства, с фиксированнь1м коэффициентом передачи интегратора 3Как видно из фиг. 2е, точность предлагаемого устройства существенно выше чем известного, а ошибка дифференцирования не зависит от величины производной входного сигнала. Повышение помехоустойчивости устройства обеспечивается выбранным способом преобразования информации в число-импульсный код в цепи управления коэффициентом передачи интегратора 3Так как соотношение времени включения и выключения релейног© элемента 2 не зависит от амплитуды помехи, то число импульсов, поступивших на сметный вход реверсивного счетчика 8, а значит и код в счетчике не зависит от значения амплитуды помехи. Таким образом, структура устройства, основанная на введении цепи управления коэффициентом передачи интегратора, позволяет повысить точность и помехоустойчивость дифференцирования медленно изменяющихся сигналов с наложенной высокочастотной помехой. Использование предлагаемого устройства в автоматических управляющих устройствах позволит повысить точность реализации законов управления, что в свою очередь приведет к повышению автоматического управления технологическими объектами и процессами. В области вычислительной техники применение ycтpoйctвa позволит повысить точность обработки информации, что и определяет технико-экономическую эффективность Ът использования изобретения. Формула изобретения Устройство для дифференцирования медленно изменяющихся сигналов, содержащее элемент сравнения, первый вход которого является входом устройства, а выход элемента сравнения через релейный элемент связан с информационными входами сглаживающего фильтра и интегратора, выход которого соединен с вторым входом элемента сравнения, при этом выход элемента сравнений через блок управляющих сигналов связан с управляющим входом сглаживающего фильтра, выход которого является выходом устройства,отличающее с я тем, что, с целью повышения точности дифференцирования в условиях воздействия помех, оно содержит последовательно соединенные триггер, мультивибратор реверсивный счетчик и преобразователь код-аналог, выход релейного элемента подключен к первому входу триггера и к управляюему входу реверсивного счетчика, выод блока управляющих сигналов подлючен к второму входу триггера, выод преобразователя код-аналог свяан с входом управления коэффициеном передачи интегратора. Источники информации, ринятые во внимание при экспертизе 1. Кортнев А.В. и др. Формирующее стройство релейного типа в системах переменной структурой.-В кн.: Сиетемы с переменной структурой и их применение в задачах автоматизации полета. М., Наука, 1968.
9932798
g
9ftht(t)
фуг: г
