(5) ТРЕНАЖЕР ЭКИПАЖА ШВЕРТБОТА ТИПА ШЛОП

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер рулевого швертбота типа КЭТ | 1979 |
|
SU947902A1 |
| Тренажер рулевого швербота | 1979 |
|
SU1029216A2 |
| Устройство для имитации приводящего момента швертбота | 1980 |
|
SU883951A1 |
| ЯХТА | 2010 |
|
RU2426670C1 |
| Парусное вооружение лодки | 1979 |
|
SU854805A1 |
| Яхтенный авторулевой | 1981 |
|
SU1020311A1 |
| ПАРУСНОЕ ВООРУЖЕНИЕ МАЧТОВОГО СУДНА | 1992 |
|
RU2050306C1 |
| ПАРУСНОЕ СУДНО | 2002 |
|
RU2265546C2 |
| Тренажер яхтсмена по управлению парусной доской | 1983 |
|
SU1119059A1 |
| РАЗБОРНЫЙ КАТАМАРАН | 1992 |
|
RU2092372C1 |
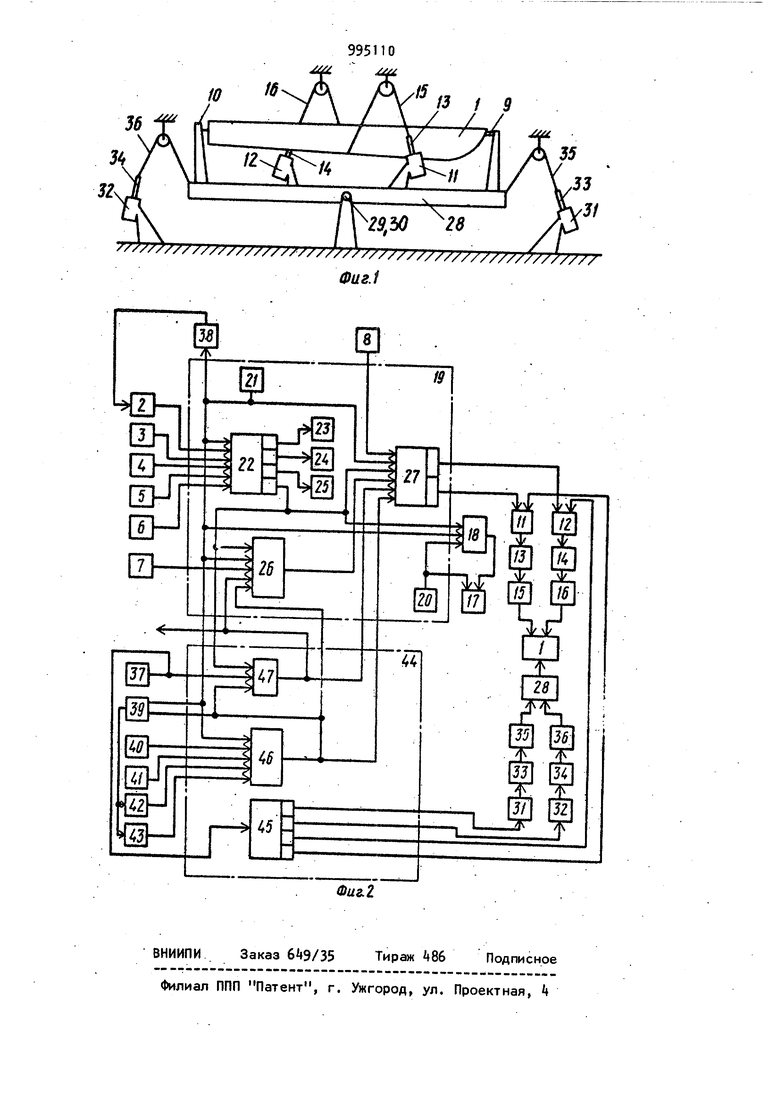
I . Изобретение относится к автоматизированным тренировочным комплексам для обучения и тренировки яхтсменов при управлении швертботом. Известен тренажер экипажа швертбота типа шлюп, содержащий корпус швертбота, бегучий такелаж, гик, руль, два соленоида с сердечниками и гибкими тягами, направлякщуи) с вентилятором и механизмом его перемещения, датчик натяжения гика шкотов бегучего такела жа, датчик угла поворота гика, датчик перемещения шверта корпуса, датчик угла поворота руля и схему управления состоящую из блока определения угла и силы имитируемого ветра, устройства оценки тягового усилия грота, световы индикаторов Норма, Расстравлен, Перебран, устройства определения циркуляции швертбота,блока определения крепящего момента и пульта управления силой и направлением ветра Cl 3 . Однако такой тренажер не может обес печить качественной и эффективной со вместной тренировки экипажа швертбота включающего матроса и рулевого, так как известный тренажер предназначен для швертботов-одиночек. Цель изобретения - повьниение эффективности совместной тренировки экипажа швертбота путем имитации динамики реаль ных нагрузок и -ветра. : Поставленная цель достигается тем, что тренажер экипажа швертбота типа шлюп содержащий корпус швертбота, бегучий такелаж, гик, руль, два соленоида с сердечниками и гибкими тягами, направляющую с вентилятором и механизмом его перемещения, датчик натяжения гика-макотов бегучего такелажа, датчик угла поворота гика, датчик перемещения шверта корпуса, датчик угла поворота руля и схему управления, состоящую из блока определения угла и силы имитируемого ветра, устройства оценки тягового усилия грота, световых индикаторов Норма, Расстравлен, Перебран, устройства определения циркуляции швертбота, бло3995ка определения крепящего момента и пульта управления силой и направлением ветра, содержит подвесы, шарнирноустанов ленную на них платформу, на которой раз. мещен корпус швертбота, дополнительные соленоиды с гибкими тягами, установленные спереди и сзади корпуса швер1бота, сердечники которых связаны гибкими тягами с платформой, имитатор стакселя,имитатор усилия на гика-шко- , тах, датчик продольного и поперечного крена, датчик натяжения передней шкаторины стакселя, датчик перемещения кип, стаксель-шкотов, датчик натяжения стаксель-шкотов, датчик угла поворота имитатора стакселя, дополнительную схему управления, входы которой связаны с соответствующими датчиками, а выходы связаны соответст- ; венно с рулем швербота, обмотками дополнительных соленоидов, имитатором стакселя и схемой-управления, выходы блока определения угла и силы имитируемого ветра которой подключены к входу дополнительной схемы управления и имитатору усилий на гика-шкотах. Дополнительная схема управления содержит имитатор проводящего момента,, имитатор продольной и поперечной ; устойчивости и устройство оценки тягового усилия стакселя, входы которого связаны с Датчиком натяжения передней шкаторины стакселя, датчиком реремещения кип„ стаксель-шкотов, датчиком натяжения стаксель-шкотов, датчиком угла поворота имитатора «такселя, блоком определения угла крена и блоком определения силы имитируемого ветра, выход которого и выходы устройства оценки тягового усилия грота и датчика продольного и поперечного крена подключены к кинематически свя. занному с рулем швертбота имитатору приводящего момента, выход которого соединен с устройством определения циркуляции швертбота и с . блоком определения крепящего момента, имитатор усилия на гика-шкотах связан с блоком определения угла и силы имитируемого . ветра, причем датчик продольного и поперечного крена подключен к имитатору продольной и поперечной устойчивости, выходы которрго связаны с обмотками дополнительных соленоидов:. На фиг.1 показана схема установки корпуса швертбота; на фиг.2 - функциональная схема тренажера. Тренажер экипажа швертбота типа шлюп содержит корпус 1 швертбота, бе104гучий такелаж и трапецию (не показаны) , датчик 2 натяжения гика-шкотов бегучего такелажа, датчик 3 угла поворота гика, три датчика k-6 перемеs соответственно шкота шкотового угла грота, оттяжки галсового угла грота, оттяжки передней шкаторины грота, датчик 7 угла поворота руля, датчик 8 перемещения шверта корпуса, 0 два шарнирных подвеса 9 и 10, два соленоида 11 и 12 поперечного крена с втягивающимися сердечниками 13 и 1А, гибкими тягами 15 и 16, вентилятор 17 с механизмом 18 его перемещения, s схему 19 управления, регистрации и индикации, состоящую из пульта 20 управления силой и направлением ветрз, блока 21 определения угла и силы имитируемого ветра, устройства 22 о тягового усилия гоота, световых индикаторов 23-25 соответственно Норма, Растравлен, Перебран устройства 26 определения циркуляции швертбота, блока 27 определения креня5 щего момента, а также состоит из платформы 28, шарнирных подвесов 29 и 30, соленоидов 31 и 32 продольного крена, установленных спереди и сзади корпуса 1, с втягивающимися сердечниками 33 0 и 3 и гибкими тягами 35 иЗб,датчика 37 продольного и поперечного крена, имитатора 38 усилий на гика-шкотах, имитатора 39 стакселя, датчика kQ натяжения передней шкаторины стакселя, датчика 41 перемещения кип стаксельшкотов, датчика k2 натяжения стаксельшкотов, датчика 3 угла поворота имитатора стакселя и схемы 44 управления индикации, включающей имитатор 45 продольной и поперечной устойчивости, устройство 46 оценки тягового усилия стакселя, имитатор 47 приводящего мо.мента, Подвесы 9 и 10с шарнирно закрепленным в них корпусом 1 швертбота, с килем которого гибкими тягами 15 и 16 связаны сердечники 13 и 14 соленоидов 11 и 12, размещены вместе с этими . соленоидами на платформе 28, установ ленной шарнирно на подвесах 29 и 30, расположенных в поперечной плоскости корпуса 1, проходящей через центр плавучести швертбота. Платформа 28 спереди и сзади корпуса 1 швертбота зана гибкими тягами 35 и 36 с сердемниками ЗЗи 3 соленоидов 31 и 32, которые закреплены на неподвижных основаниях. На направляющей (не показана). 5 95 установленной в горизонтальной плос костй вокруг корпуса 1, размещен вентилятор 17с механизмом 18 его перемещения. Пульт 20 управления силой и направлением ветра соединен электрически с вентилятором 17 и механизмом 18 его перемещения, к которому также подсоединены выходы блока 21 определения угла и силы имитируемого ветра и устройства 26 определения циркуляции швертбота. Датчик 2 натяжения гика-шкотов бегучего такелажа, датчик 3 угла поворота ,. датчики k-6 перемещения шкота шкотового угла грота оттяжки галсового угла грота, оттяжки передней шкаторины грота и блок ,21 оп ределения угла и силы имитируемого ветра соответственно подключены к вхо дам устройства 22 оценки тягового уси лия грота, к логическим выходам которого подсоединены световые индикаторы 23-25 Норма, Растравлен, Перебран. Аналоговый выход устройства 22 датчик 7 угла поворота руля, блок 21 определения угла и силы имитируемого ветра, выходы имитатора 7 приводящег момента и устройства 6 оценки тягово го усилия стакселя, соответственно соединены с входами устройства 26 определения циркуляции швертбота, датчик 8 перемещения шверта корпуса, аналоговый выход устройства 22, блок 21, выходы устройства k6 оценки тягового усилия стакселя и имитатора kj приводящего момента соответственно подключены к входам блока 27 определения крутящего момента, выходы которого соединены с обмотками соленоидов 11 и 12. Датчик 40 натяжения передней шкаторины стакселя, датчик 41 перемещения кип стакселя-шкотов, датчик 42натяжения стаксепь-шкотов, датчик 43угла поворота имитатора стакселя и блок 21 определения угла и силы имитируемого ветра связаны с входами .устройства 46 оценки тягового усилия стакселя, выход которого через аналоговый выход устройства 22 оценки тягового усилия грота и датчик 37 продольного и поперечного крена подсоединены к входам имитатора 47 приводящего момента, выход которого кинематически связан с рулем швертбота, лок21 определения угла и силы имитируемого ветра и выход устройства 46 оценки тягового усилия стакселя также подключены к имитатору стакселя который кинематически связан с датчиком 42 натяжения стаксепь-шкотов и 06 датчиком 43 угла . поворота имитатора стакселя. Датчик 37 продольного и поперечного крена также подключен к имитатору 45 продольной и поперечной устойчивости, выходы которого связываются с обмотками соленоидов 31 32 и 11, 12 продольного и поперечного крена. .Система замыкается через обучаемый экипаж, который управляет тренажером с помощью бегучего такелажа, шверта корпуса, гика, имитатора стакселя и руля и откренивающего корпус швертбота своим весом. Тренажер работает следующим образом. В устройство 22 оценки тягового усилия грота исходно заносится значение оптимального угла поворота гика, как функции курса яхты относительно ветра, типа швертбота, мачты, формы грота и силы ветра. На логических выходах устройства 22 происходит сравнение оптимального угла поворота гика с реальным и в результате высвечиваются соответственно индикаторы 23-25 Норма, Растравлен,. Перебран, а ня аналоговом выходе устройства 22 формируются сигналы, зависящие от конкретных исходных аэродинамических свойств грота, реального и оптимального углов поворота гика, параметров датчиков перемещения и натяжения бегучего такелажа грота и гика и пропорциональные кренящему моменту и тяге, передаваемым на швертбот гротом в случае прямолинейного движения. В устройство 46 оценки тягового усилия стакселя исходно заносится значение оптимального угла поворота прямой линии, соединяющей галсовый и шкотовый углы стакселя, как функции курса относительно ветра, типа швертбота, формы стакселя и силы ветра, а на выходе устройства 46 формируются сигналы, определяемые конкретными исходными . аэродинамическими свойствами стакселя, оптимальным углом поворота указанной прямой линии и реальным углом поворота имитатора стакселя, параметрами датчиков перемещения и натяжения бегучего такелажа стакселя и кип стаксель-шкотов и пропорциональные кренящему моменту и тяге, передаваемым на швертбот стакселем в случае прямолинейного движения. Имитатор 47 приводящего момента формирует электрический сигнал, пропорциональный величине приводящего момента, образующегося . 799 под действием сил тягм грота и стаиселя и зависяи(его от угла попе «за-и юг а |феиа швертбота, и мехаиичесгсощ yi-i лие, передаваемое на руль irfa6.;0;,;/rмое для удержаний швертбога яа кул; и зависящее от угла его закладки и величины приводящего момента Ветровой поток, имитируемый ванти лятором, 17. воспринимается обуиаай-ым экипажем швертбота и воздействует на блок 21 определения угла и силь имитируемого ветра, который формирует на блока 27 определения креня цего момента такой электрический ток, который будучи подключен напрямую к соленоиду поперечного крена без уме-; э сигналов на входах блока 2/, создаст кренящий момент, максимально возможный для данных угла и силы ветра при полностью выбранных гика-iuKCTax и стаксель-шкотах,гике, расположенном в диаметральной плоскости швертбота, . стаксель-шкотов, сдвинутых мак симально вперед, и максимально выпу щенком шверте. Имитатор 38 усилия на гика-шкотах и имитатор 39 стакселя преобразуют изменения силы и направления имитируемого ветра в изменение усилий на гика-шкотах и стаксель-шкотах, Управляя рулем швертбота, рулевой воздействует на датчик 7 угла поворота руля, при этом в устройстве 26 определения п.иркуляции швертботаМоделируется траектория движения швертбо та относительно ветра, причем скорость циркуляции приведения мли увеличения определяется сигналом устройства 22 оценки тягового усилия грота, устройства 4б оценки тягового усилия стакселя, имитатора 47 приводящего мо мента и блока 21 определения угла и силы имитируемого ветра. Выходной .сигнал устройства 26 определения циркуляции швертбота через механизм 18 перемещения вентилятора воздействует на вентилятор 17, перемещая его по напраЕшяющей, имитируя тем самым динамику движения вращения швертбота относительно ветра. Сигнал датчика 8 перемещения шверта, выходные сигналы устройства 22 оценки тягового усилия грота, устройства 26 определения цйркуляции швертбота, устройства 46 оцен ки тягового усилия стакселя, имитатора 47 приводящего момента модулируют в ©доке 27 определения кренящего момента ток обмотки соленоида попереч0 ,-;ог;.; крена, имитируя тем самым дина.; , 1 ремяш,йго момента в зависимости ;-; с i i:i;:i;HHHc Кренящих моментов грота и с:..,,:; eji ii а зависимости от направ:. .-,ия iibSpTooTa относительно ветра. ,. L 1)льта 20 угфавления силой и направLлением ветра задаются либо сигналы, пропорциональные постоянно-дискретным БОзмущен /;яй силы и направления seTpa. либо синтезируется непрерывный сигналS, имеющий случайный характер, близкий к реальным ветровым условиямj при этом по этим законам меняется скорость вращения лопастей и перемещение аентилятора 17 по направляющей. M.-; -ifSTOp 45 продольной и поперечной устойчивости формирует сигналь, пропорциональные моментам статистической поперечной м продольной устой.чиеостИр которые необходимы для обу,чаемых спротсменов в швертботе, : Для тренировки управления швертботом на галсе экипаж, выставив регулировками грота и стакселя необходимую аэродинамическую геометрию грота и стакселя, добирает гика-шкоты и стаксель-шкоты, проверяя правильность своих действий по световым индикаторам и имитатору стакселя и откренивает швертбот, при этом рулевой удерживает рулем швертбот на курсе. . Для моделирования поворота оверштаг швертбот ставят на галс, затем рулевой кладет руль на приведение, при этом имитируется циркуляция приведения швертбота, кренящий момент и выходной сигнал блока 27 определения кренящего момента уменьшаются, механизм 18 перемещения вентилятора передвигает вентилятор 17 к носу швертбота, при прохождении имитируемым ветром положения девентик начинает имитироваться циркуляция уваливания швертбота, вентилятор 17 передвигается от носа швертбота на новом галсе, блок 27 определения креня щего момента переключается на другой соленоид поперечного крена и выходной сигнал последнего блока начинает увеличиваться. Достаточно увалив, рулевой ставит рулем швертбот на галс и экипаж оценивает правильность постановки парусов по индикаторам. Регулируя бегучий такелаж грота и стакселя, шверт корпуса, работая гикашкотами и стаксель-шкотами бегучего такелажа, рулем и откренивая, спортсмены получают навыки и отрабатывают технику управления швертботом типа шлюп. Формула изобретения 1. Тренажер экипажа швертбота типа шлюп, содержащий корпус швертбота бегучий такелаж, гик, руль, два солениода с сердечниками и гибкими тягами, направляющую с вентилятором и механизмом его перемещения, датчик натяжения гика-шкотов бегучего такелажа, датчик угла поворота гика, дат мик перемещения шверта корпуса, датчик угла поворота руля и схему управ ления, состоящую из блока определени угла и силы имитируемого ветра, устройства оценки бегучего усилия грота световых индикаторов Норма, Растравлен, Перебран, устройства определения циркуляции швертбота, блок определения кренящего момента и пуль та управления силой и направлением, ветра отличающийся тем что, с целью повышения эффективности совместной тренировки экипажа швертбота путем имитации динамики реальны нагрузок и ветра, он содержит подвесы, шарнирноустановленную на них платформу, на которой размещен корпус швертбота, дополнительные соленоиды с гибкими тягами, установленны спереди и сэади корпуса швертбота,сердечники которых связаны гибкими тяга ми с платформой, имитатор стакселя, имитатор усилия на гика-шкотах, датчик продольного и поперечного крена, датчик натяжения передней шкаторины стакселя, датчик перемещения. кип, стаксель-шкотов,датчик натяжения стак сель-шкотов, датчик угла поворота имитатора стакселя, дополнительную схему управления, входы которой связаны с соответствующими датчиками, а выходы связаны соответственно с ру0 ТО лем швертбота, обмотками дополнительных соленоидов,, имитатором Ьтакселя и схемой управления, выходы блока определения угла и силы имитириуемого ветра которой подключены к входу дополнительной схемы управления и имитатору усилий на гика-шкотах. 2. Тренажер по п.1, о т л и ч аю щ и и с я тем, что дополнительная схема управления содержит имитатор приводящего момента, имитатор продольной и поперечной устойчивости, и устройство оценки, тягового усилия стакселя, входы которого связаны с датчиком натяжения передней шкаторины стакселя, датчиком перемещения кип, стаксель-шкбтор, датчиком натяжения стаксель-шкотов, датчиком угла поворота имитатора стакселя, блоком оп- . ределения угла крена и блоком определения силы имитируемого ветра, выход которого и выходы устройства оценки тягового усилия трота и датчика продольного и поперечного крена подключены к кинематически связанному с рулем швертбота имитатору приводящего момента, выход которого соединен с устройством определения циркуляции швертбота и с блоком определения кренящего момента, имитатор усилия на гика-шкотах связан с блвяом определения угла и силы имитируемого ветра, причем датчик продольного и поперечного к;рена подключен к имитатору продольной и поперечной устойчивости, выходы которого связаны с обмотками дополнительных соленоидов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 27338А7/28-12, кл. G 09 В 9/06, 1979.
